

Дифференциальные уравнения 2
.pdfРассмотрим теперь задачу Коши |
|
x′ = A(t)x + f(t), x(t0) = x0, t (a, b). |
(9.15) |
Для этого в формуле (9.14) положим t = t0 и x = x0. Далее подставив найденное значение C(t) в формулу (9.14), находим решение задачи Коши (9.15) в виде
∫t |
|
x = X(t)X−1(t0)x0 + X(t) X−1(τ)f(τ)dτ. |
(9.16) |
t0 |
|
Формула (9.16) носит название формулы Коши.
51

§ 10. Системы линейных дифференциальных уравнений с постоянными коэффициентами.
Систему линейных дифференциальных уравнений |
|
||
|
x1′ = a11x1 + . . . + a1nxn, |
|
|
|
|
|
|
|
|
+ . . . + a2nxn, |
|
x2′ = a21x1 |
|
||
. . . . . . . . . . . . . . . |
(10.1) |
||
|
|
|
|
|
|
|
|
|
|
+ . . . + annxn, |
|
xn′ = an1x1 |
|
||
где aij R, i = 1, n, j = 1, n, будем называть однородной линейной системой обыкновенных дифференциальных уравнений с постоянными коэффициентами.
Введем матрицу A = ||aij||n×n и вектор-столбец неизвестных функций x = (x1, . . . , xn)T . С их помощью система (10.1) записывается в векторном виде
x′ = Ax |
(10.2) |
Часто система (10.2) интегрируется путем сведения к однородному линейному дифференциальному уравнению более высокого порядка, причем это дифференциальное уравнение будет также линейным с постоянными коэффициентами. Однако можно и непосредственно найти фундаментальную систему решений системы (10.1).
Одним из таких методов является метод Эйлера. В соответствии с этим методом нетривиальное решение системы (10.1) ищется в виде
x1 = γ1eλt, . . . , xn = γneλt, |
(10.3) |
где неизвестные числа γ1, . . . , γn, подлежат определению. В векторной записи решения (10.3) имеют вид
x = γeλt, |
(10.4) |
52
где γ = (γ1, . . . , γn)T .
Подставляя (10.4) в (10.2), затем сокращая на eλt и перенося все члены в левую часть равенств, получаем систему линейных однородных алгебраических уравнений относительно
γ1, . . . , γn:
(a11 − λ)γ1 + a12γ2 + . . . + a1nγn = 0,a21γ1 + (a22 − λ)γ2 + . . . + a2nγn = 0,
· · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·
an1γ1 + an2γ2 + . . . + (ann − λ)γn = 0,
или в векторной записи:
(A − λI)γ = 0,
где I есть единичная матрица размера n × n.
На основании системы (10.6) делаем следующий вывод: чтобы вектор-функция (10.4) была решением системы (10.2), необходимо и достаточно, чтобы λ и γ были, соответственно, собственным значением и собственным вектором матрицы A. Для отыскания собственных значений матрицы A необходимо решить уравнение
A − λI = 0, |
(10.7) |
называемое характеристическим уравнением системы (10.2). В его левой части стоит многочлен n–ой степени с вещественными коэффициентами. Он называется характеристическим многочленом системы (10.2).
Характеристическое уравнение (10.7) имеет ровно n корней (с учетом их кратности). При этом возможны следующие случаи: 1) корни характеристического уравнения вещественны и различны; 2) корни характеристического уравнения различные, но среди них имеются комплексные; 3) среди корней характеристического уравнения имеются кратные. Рассмотрим каждый из этих случаев по отдельности.
53
Случай 1. Корни характеристического уравнения вещественны и различны. В этом случае матрица A имеет n линейно независимых собственных векторов γ1, . . . , γn, где
γ1 = (γ11, . . . , γn1)T , . . . , γn = (γ1n, . . . , γnn)T .
Тогда согласно (10.3) решениями системы (10.2) являются вектор–функции
xj = γjeλj t, j = |
|
|
(10.8) |
1, n. |
|||
Согласно теореме 9.2 функции (10.8)линейно независимы, т.е. образуют фундаментальную систему решений системы (10.2). Тогда общее решение этой системы имеет вид
x = C x1 |
+ . . . + C xn. |
(10.9) |
1 |
n |
|
Случай 2. Корни характеристического уравнения различные, но среди них имеются комплексные. Пусть одним из комплексных корней является λ = α + i β, β ≠ 0. Так как коэффициенты характеристического уравнения есть вещественные числа, то и λ = α − i β также будет корнем этого уравнения. Отвечающие этим двум корням λ и λ соответствующие собственные векторы также имеют комплексно сопряженные координаты, что следует из равенств
Aγ = λγ, Aγ = λγ
(т.к. в силу вещественности A = A).
Пусть γ = u + i v есть собственный вектор, соответствующий собственному значению λ = α + i β. Тогда согласно (10.3) вектор–функция
x = γeλt = (u + i v)e(α+i β)t
является решением системы (10.2). Применив формулу Эйлера, получим комплекснозначное решение системы (10.2) в
54

виде |
|
x = (u + i v)eαt(cos βt + i sin βt) = eαt(u cos βt− |
(10.10) |
−v sin βt) + i eαt(v cos βt + u sin βt). |
|
Как и в случае линейных однородных дифференциальных уравнений, показывается, что по отдельности действительная
(u cos βt − v sin βt)eαt и мнимая (v cos βt + u sin βt)eαt части комплекснозначного решения являются решениями системы (10.2).
Итак, мы получили, что паре комплексно сопряженных корней λ1,2 = α ± i β характеристического уравнения соответствует пара вещественных вектор–решений системы (10.2):
x1 = (u cos βt − v sin βt)eαt, |
(10.11) |
x2 = (v cos βt + u sin βt)eαt. |
|
3. Среди корней характеристического уравнения имеются кратные (вещественные или комплексные).
Пусть среди корней характеристического уравнения имеется k–кратный корень λ (вещественный или комплексный). Ему соответствует решение
x = P k−1(t)eλt = (P1k−1(t), . . . , Pnk−1(t))eλt, |
(10.12) |
где каждая компонента Pik−1(t), i = 1, n, есть многочлен степени не выше k − 1 с постоянными коэффициентами, пока не определенными. Они находятся методом неопределенных коэффициентов. Отметим, что в случае комплексного корня λ аналогично пункту 2 на основании комплекснозначного решения (10.12) путем выделения его действительной и мнимой частей получаем вещественные решения.
Как мы показали в предыдущем параграфе, линейные неоднородные системы дифференциальных уравнений можно решить (если известна фундаментальная система решений со-
55
ответствующей линейной неоднородной системы) методом вариации произвольных постоянных (методом Лагранжа). Однако в частных случаях для нахождения общего решения можно использовать теорему 9.5 и метод неопределенных коэффициентов. Рассмотрим линейную неоднородную систему дифференциальных уравнений со специальной правой частью
x′ = Ax + f(t), |
(10.13) |
где вектор–функция |
|
f(t) = eαt(Pl(t) cos βt + Qm(t) sin βt), |
(10.14) |
α и β есть заданные вещественные числа, Pl(t) и Qm(t) есть вектор–функции, компонентами которых являются многочлены по переменной t со степенями, равными или меньшими, соответственно, l и m. В этом случае частное решение неоднородной системы (10.13) нужно искать в виде
x = eαt(Rq+s(t) cos βt + Tq+s(t) sin βt), |
(10.15) |
где Rq+s(t) и Tq+s(t) есть вектор–функции, компонентами которых являются многочлены степени q+s с неопределенными пока коэффициентами,
q = max{l, m};
0, если число α + i β не совпадает ни с одним корнем
характеристического уравнения (10.7); s =
k, если число α + i β совпадает с корнем кратности k этого характеристического уравнения.
В заключение отметим, что если правая часть системы (10.13) представляет собой сумму k вектор–функций вида (10.14), то частное решение этой системы находится с помощью принципа суперпозиции из § 9.
56
§11. Фазовая плоскость однородного линейного векторного уравнения размерности 2.
На фазовой плоскости Ox1x2 решения дифференциаль-
ной системы |
|
dx |
|
|
|
|
|
|
|
|||
|
|
= a11x1 + a12x2, |
|
|
|
(11.1) |
||||||
|
dt1 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dx2 |
= a21x1 + a22x2 |
|
|
|
|
||||||
|
|
|
dt |
|
|
|
графиками |
(траекториями) |
||||
|
|
|
|
|
||||||||
изображаются |
фазовыми |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 = x1(t), x2 = x2(t). В частном случае |
|
|
|
|
||||||||
|
|
|
dx |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
dt1 |
= x2, |
|
|
|
(11.2) |
||||||
|
|
dx2 |
= |
δx1 + σx2 |
|
|
|
|
||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
− |
|
|
1 |
|
|
|
dt |
|
|
|
dx |
|
|
|||||
траектории системы (11.2) в силу соотношения |
|
= x2 сов- |
||||||||||
dt |
||||||||||||
падают с фазовыми графиками дифференциального уравнения
x′′1 − σx′1 + δx1 = 0
(см. § 5). Так как собственные числа матриц
a11 |
a12 |
) |
и B = ( |
0 |
1 |
A = ( a21 |
a22 |
−δ = −det A σ = tr A ) |
|||
совпадают, то в случае A ≠ λI матрицы A и B оказываются подобными. Поэтому, на основании указанной выше связи между дифференциальной системой (11.2) и линейным однородным дифференциальным уравнением второго порядка с постоянными коэффициентами, при A ≠ λI расположение траекторий дифференциальной системы (11.1) с точностью до линейного невырожденного преобразования описано в § 5.
57
Рассмотрим теперь оставшийся случай, т.е. когда диффе-
ренциальная система (11.1) имеет вид |
|
||
|
dx |
= λx1, |
(11.3) |
dt1 |
|||
|
|
|
|
|
dx2 |
= λx2. |
|
|
|
||
dt |
|
|
|
|
|
|
|
Общее решение дифференциальной системы (11.3) таково:
x1 = C1eλt, x2 = C2eλt.
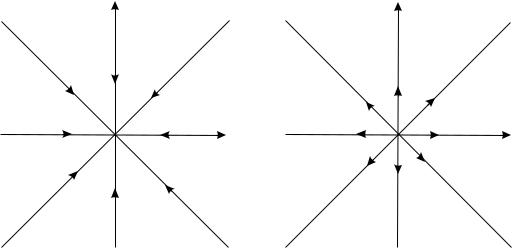
Если λ ≠ 0, то траектории дифференциальной системы (11.3) являются либо точкой покоя (при C1 = C2 = 0), либо лучами прямых, примыкающими к точке покоя. Такое расположение траекторий называют дикритическим узлом (рис. 11.1 а, б).
x |
l < 0 |
x |
l > 0 |
2 |
|
||
|
2 |
||
|
|
||
|
|
|
x1 |
x1 |
а) |
" ) |
Рис. 11.1.
При λ = 0 каждая точка фазовой плоскости является точкой покоя дифференциальной системы (11.3).
58
§ 12. Интегралы систем линейных дифференциальных уравнений с постоянными коэффициентами.
Рассмотрим линейную относительно x1, . . . , xn невырожденную форму
|
|
|
|
n |
|
||
l(x1, . . . , xn, t) = |
ψi(t)xi + g(t), |
(12.1) |
|||||
|
|
|
|
i=1 |
|||
t |
|
I, xi |
|
∑i = |
|
|
|
|
1, n, |
|
|||||
|
|
R |
|
||||
где g : I → R и ψi : I → R есть непрерывно дифференцируемые функции, причем ψi отличны от тождественного нуля, i = 1, n. Форму l(x1, . . . , xn, t) будем называть первым интегралом системы
x′ = Ax + f(t), |
(12.2) |
где A = ||aij||n×n, f : I → R, есть непрерывная функция, если она сохраняет постоянное значение вдоль любого решения x(t) = (x1(t), . . . , xn(t))T системы (12.2):
∑n
x′i(t) = aijxj(t) + fi(t), t I, i = 1, n,
j=1
то есть
l(x1(t), . . . , xn(t)) ≡ const.
Если форма (12.1) есть первый интеграл системы (12.2), то график удовлетворяющего начальным условиям
xi(t0) = x0i , i = 1, n,
решения этой системы при всех t I лежит в пространстве Rn+1 = (t, x1, . . . , xn) на поверхности
n |
n |
|
|
|
|
∑ |
59∑ |
)x0 |
|
|
|
ψ (t)x |
+ g(t) = ψ (t |
+ g(t |
). |
(12.3) |
|
i i |
i 0 |
i |
0 |
|
|
i=1 |
i=1 |
|
|
|
|
Совокупность первых интегралов
∑n
lj(x1, . . . , xn) = ψjixi + gj, j = 1, n,
i=1
будем называть интегралом системы (12.2), если при некоторых постоянных ξj система
lj(x1, . . . , xn) = ξj, ξj R, t I, j = 1, n, |
(12.4) |
задает решение x1 = x1(t), . . . , xn = xn(t), системы (12.2). Если же система (12.4) определяет решение системы (12.2) при любых постоянных ξj = Cj из некоторого множества Γ = {(C1, . . . , Cn)} Rn, то совокупность первых интегралов
lj(x1, . . . , xn), j = 1, n, будем называть общим интегралом
системы (12.2). Общий интеграл будем называть полным интегралом, если он задает все решения системы (12.2).
Запишем систему (12.4) в векторном виде:
ψx + g = ξ, t I, ξ Rn, |
(12.5) |
где ψ = ||ψji||n×n, x = (x1, . . . , xn)T , g = (g1, . . . , gn)T , ξ = (ξ1, . . . , ξn)T .
Необходимым условием существования на I решения векторного уравнения (12.5) при любом векторе ξ является невырожденность матрицы ψ при всех t I.
Пусть det ψ(t) ≠ 0, t I. Если уравнение (12.5) при любом ξ Rn имеет единственное решение
x = x(t) = ψ−1(t)ξ − ψ−1(t)g(t), t I. |
(12.6) |
Пусть t0 есть фиксированная точка промежутка I. Тогда при невырожденной на I матрице ψ соотношение (12.5) равносильно соотношению
ψt0x + gt0 = ξt0,60t I, ξt0 Rn,