

Izmeritelnye_preobrazovateli_Mironov
.pdfзывается равновесной, а если в момент считывания показаний напряжение U0 ≠ 0, то мостовая схема называется неравновесной.
Выражения (11.1) и (11.6) свидетельствуют, что как для токовой, так и для потенциальной мостовых измерительных схем равновесие наступает при выполнении условия
R1 R4 = R2 R3 , |
(11.7) |
где R1 , R2 , R3 и R4 – определены выше.
Подробный анализ равновесных и неравновесных мостовых измерительных схем с выходом по току («токовые схемы») и с выходом по напряжению («потенциальные схемы») приводится ниже, в последующих главах учебного пособия.
Мостовые схемы с токовым выходом («токовые схемы») используются в том случае, когда внутреннее сопротивление измерительного прибора R0 при-
мерно равно каждому из сопротивлений плеч моста R1 , R2 , R3 , R4 или отлича-
ется от них не более чем в 15–20 раз.
11.2. Основные соотношения при исследовании чувствительности
Для мостовых измерительных схем могут быть определены их чувствительности по мощности S(P0), по напряжению S(U0) и по току S(I0).
S(P0 ) = lim |
P0 |
, |
(11.8) |
|
R→0 |
R |
|
|
|
S(U0 ) = lim |
U0 |
, |
(11.9) |
|
R |
||||
R→0 |
|
|
||
S(I0 ) = lim |
I0 |
, |
(11.10) |
|
R→0 |
R |
|
|
где P0, U0, I0 – соответственно мощность, напряжение и ток в измерительной диагонали;
P0, U0, I0 – изменения мощности, напряжения и тока в измерительной диагонали;
R – изменение сопротивления датчика (вызвавшее изменение мощности, напряжения или тока в измерительной диагонали мостовой схемы).
201

При размещении датчика в 1–м плече мостовой схемы R = R1 , при раз-
мещении во 2–м плече R = R2 и т. д. При размещении нескольких датчиков в одном, двух или нескольких плечах мостовой схемы R имеет некоторое эквивалентное значение, зависящее от числа датчиков и от их размещения. Порядок
определения эквивалентных значений |
R рассмотрен ниже, в последующих |
|||
главах учебного пособия. |
|
|
|
|
Чувствительность по мощности, напряжению и току может быть оценена |
||||
по приближенным формулам: |
|
|
|
|
S(P0 ) ≈ |
P0 |
, |
(11.11) |
|
|
R |
|
|
|
S(U0 ) ≈ |
U0 |
, |
(11.12) |
|
R |
||||
|
|
|
||
S(I0 ) ≈ |
I0 . |
(11.13) |
||
|
R |
|
|
|
Чувствительность по мощности рассматривается в том случае, когда в измерительной диагонали включен прибор, внутреннее сопротивление которого соизмеримо с сопротивлениями плеч мостовой схемы. Например, при использовании приборов магнитоэлектрической системы, что обычно имеет место на практике, справедливо соотношение
α = k |
P0 |
(11.14) |
|
R0 |
|||
|
|
где α – показание прибора; k – постоянный коэффициент; P0 – мощность, потребляемая прибором; R0 – внутреннее сопротивление прибора.
Таким образом, при R0 = const показания выходного прибора пропорциональны корню квадратному из мощности, потребляемой прибором.
Чувствительность по напряжению рассматривается в том случае, когда в измерительную диагональ включен прибор, внутреннее сопротивление которого значительно больше сопротивлений плеч мостовой схемы (R0→∞). На практике этот случай имеет место, когда в качестве измерителей используются, например, электронные вольтметры.
202
11.3. Основные соотношения при исследовании линейности
В данном параграфе учебного пособия приводятся основные соотношения при исследовании линейности четырехплечих мостовых измерительных схем (см. рис. 11.1) постоянного тока с выходом по току и по напряжению.
О линейности (или нелинейности) токовых мостовых измерительных схем можно судить по характеру зависимости (11.15), получаемой из (11.1) при изменении сопротивления датчика (или датчиков).
I0 = f ( R), |
(11.15) |
где I0 – ток в измерительной диагонали;
R – изменение сопротивления датчика.
Линейность (или нелинейность) потенциальных мостовых измерительных схем характеризуется видом зависимости (11.16), получаемой из (11.16) при
R ≠ 0. |
|
U0 = f ( R), |
(11.16) |
где U0 – напряжение на измерительной диагонали.
При анализе соотношений (11.15) и (11.14) обычно рассматривают несколько вариантов мостовых схем:
1)с одним датчиком ( R ≠ 0 в одном плече схемы);
2)с двумя датчиками ( R ≠ 0 в двух плечах схемы);
3)с тремя датчиками ( R ≠ 0 в трех плечах схемы);
4)с четырьмя датчиками ( R ≠ 0 в четырех плечах схемы).
Для анализа линейности неравновесных мостовых измерительных схем удобно принять следующие обозначения:
1) |
текущее сопротивление датчика в первом плече схемы Rg1 = R1+ R 1, |
|
2) |
во втором плече Rg2 = R2+ |
R 2, |
3) |
в третьем плече Rg3 = R3+ |
R 3, |
4) |
в четвертом плече Rg4 = R4 + R 4, |
|
5) |
где R1, R2, R3, R4 – начальные (исходные) сопротивления датчиков; |
|
6) |
R 1, R 2, R 3, R 4 –изменение сопротивления соответствующих |
|
датчиков.
203
12. НЕРАВНОВЕСНЫЕ ТОКОВЫЕ МОСТОВЫЕ ИЗМЕРИТЕЛЬНЫЕ СХЕМЫ
12.1. Чувствительность токовых мостовых схем
12.1.1. Общие положения
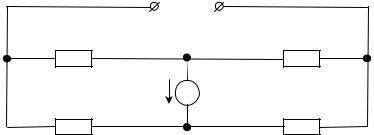
Исследование чувствительности неравновесных токовых мостовых измерительных схем проводится при допущении, что используется один датчик, включенный в первое плечо мостовой схемы (рис. 12.1).
Рис. 12.1. Принципиальная схема неравновесного токового моста с одним датчиком
Для схемы, приведенной на рис. 12.1, ток в измерительной диагонали мостовой схемы I0 имеет значение:
|
I0 =U |
|
Rg R4 |
− R2 R3 |
|
|
, |
(12.1) |
|
|
R0 (Rg + R2 )(R3 + R4 )+ Rg |
R2 |
(R3 + R4 )+ R3 R4 |
(Rg + R2 ) |
|||||
|
|
|
|
||||||
где U – напряжение питания; |
|
|
|
|
|
|
|
||
R0 – сопротивление прибора в измерительной диагонали мостовой схемы; |
|
||||||||
Rg |
– сопротивление датчика; |
|
|
|
|
|
|
|
|
R2 , |
R3 , R4 – сопротивление плеч моста. |
|
|
|
|
|
|
||
|
Дальнейший анализ рассматриваемой мостовой схемы проводится при |
||||||||
следующих допущениях: |
|
|
|
|
|
|
|
||
|
1) сопротивление датчика Rg |
определяется соотношением |
|
|
|||||
|
|
Rg |
= R1 + |
R1 , |
|
|
|
(12.2) |
|
где R1 – начальное (исходное) сопротивление датчика; |
|
|
|
|
|||||
R1 |
– изменение сопротивления датчика; |
|
|
|
|
|
|
||
|
|
|
204 |
|
|
|
|
|
|
2) |
изменение сопротивления датчика много меньше сопротивления |
|
самого датчика, т. е. |
|
|
|
R1 << R1 , |
(12.3) |
где R1 и R1 – определены выше;
3) в исходном состоянии мостовая схема уравновешена, т.е. справедливо
равенство |
|
R1 R4 = R2 R3 , |
(12.4) |
где R1, R2, R3 и R4 – определены выше.
С учетом условий (12.2), (12.3) и (12.4) выражение (12.1) для тока I0 в измерительной диагонали мостовой схемы принимает вид
I0 |
=U |
|
|
|
|
|
|
|
|
|
|
R1 |
R4 |
|
|
|
|
|
|
|
|
, |
(12.5) |
|
R |
(R |
+ R |
+ R |
2 |
)(R |
+ R |
4 |
)+ R |
(R + |
R )(R + R |
4 |
)+ R R |
(R + |
R + R |
4 |
) |
||||||
|
|
|
|
|
|||||||||||||||||||
|
|
0 |
1 |
1 |
|
3 |
|
2 |
1 |
1 |
3 |
3 |
4 |
1 |
1 |
|
|
|
|||||
где I0 , U, R0, R1, R2, R3, R4, |
|
R1 – определены выше. |
|
|
|
|
|
|
|
||||||||||||||
|
|
В зависимости от соотношения параметров различают следующие виды |
|||||||||||||||||||||
мостовых схем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
1)первой симметрии (R1 = R2; R3 = R4);
2)второй симметрии (R1 = R3; R2 = R4);
3)равноплечие (R1 = R2 = R3 = R4);
4)асимметричные (R1 ≠ R2; R3 ≠ R4).
Используя выражение (12.5), можно получить значения тока I0 для каж-
дого вида мостовых схем (для схем первой симметрии, второй симметрии, равноплечих и асимметричных).
Для схемы первой симметрии
|
|
|
I0 |
=U |
|
R1 |
|
|
|
|
(12.6) |
|
|
|
|
2R0 (2R1 + R1 )+ 2R1 |
(R1 + R1 )+ R4 |
(2R1 |
+ |
R1 ) |
|||||
|
|
|
|
|
|
|||||||
Для схемы второй симметрии |
|
|
|
|
|
|
||||||
I0 |
=U |
|
|
|
|
R1 |
|
|
|
|
. (12.7) |
|
R0 |
(R1 |
+ R4 + R1 )(R1 + R4 )+ R4 (R1 + R1 )(R1 + R4 )+ R1R4 |
(R1 + R4+ R1 ) |
|||||||||
|
|
|
||||||||||
205
Для равноплечей схемы
|
|
|
I0 =U |
|
R1 |
|
. |
|
(12.8) |
|
|
|
|
2R0 (2R1 |
+ R1 )+2R1 (R1 + |
R1 )+ R1 (2R1 + R1 ) |
|
||||
|
|
|
|
|
|
|
||||
Для асимметричной схемы |
|
|
|
|
||||||
I0 |
=U |
|
|
|
R1 |
|
|
|
. (12.9) |
|
R0 |
(R1 + R2 + R1 )(R3 |
+ R4 )+ R2 (R1 + R1 )(R3 + R4 )+ R3R4 (R1 + R2+ |
R1 ) |
|||||||
|
|
|
||||||||
Считая, что R1 >> R1 и пренебрегая в силу этого значением |
R1 в знаме- |
|||||||||
нателе соотношений (11.4), (11.5), (11.6), (11.7), получим следующие уравнения:
для схемы первой симметрии
|
|
|
|
|
|
|
|
I0 |
=U |
|
|
|
|
|
R1 |
|
|
|
|
|
|
; |
|
|
|
(12.10) |
|||||||
|
|
|
|
|
|
|
|
4R R + |
2R2 |
+ 2R R |
4 |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
|
1 |
|
|
1 |
|
|
|
|
|
|
|
||||
для схемы второй симметрии |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
I0 |
=U |
|
|
|
|
|
|
|
|
|
R1R4 |
|
|
|
|
|
|
|
; |
|
|
|
|
|
(12.11) |
||||||
|
|
|
R |
(R |
+ R |
4 |
)2 + |
2R R |
(R |
+ R |
4 |
) |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
0 |
1 |
|
|
|
|
|
|
|
1 |
4 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||
для равноплечей схемы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
I0 |
=U |
|
|
|
|
|
|
R1 |
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
(12.12) |
|||
|
|
|
|
|
|
|
4R R |
|
+ 4R2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
для асимметричной схемы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
I0 =U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R1R4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
(12.13) |
|||
R |
(R |
+ R |
2 |
) |
+ (R + R |
4 |
) |
+ R |
2 |
R (R |
3 |
+ R |
4 |
)+ R R |
(R + R |
2 |
) |
||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||||
|
0 |
1 |
|
|
|
|
3 |
|
|
|
|
|
|
1 |
|
|
|
|
|
3 |
4 |
1 |
|
|
|
||||||||
где I0, U, R1 , R0, R1, R2, R3, R4 – определены выше.
Полученные соотношения (12.10), (12.11), (12.12) и (12.13) позволяют проанализировать рассматриваемые мостовые измерительные схемы с точки зрения их чувствительности и линейности. Соответствующие исследования приведены ниже, в последующей главе учебного пособия.
12.1.2. Основные соотношения
В главе 11 (пп. 11.1 и 11.2) показано, что чувствительность токовых мостовых схем при использовании электромеханических приборов для измерения тока I0 тем выше, чем большая мощность выделяется в измерительной диагона-
ли моста. Отсюда следует, что для токовых мостовых схем необходимо рас-
206
сматривать чувствительность по мощности (см. выражения (11.8) и (11.11), приведенные в п. 11.2 учебного пособия).
Тогда для рассмотренных схем (первой и второй симметрий, равноплечей и асимметричной) правомерны нижеследующие соотношения.
Схемы первой симметрии Мощность, выделяемая в измерительной диагонали мостовой схемы, оп-
ределяется соотношением
P0 = I02 R0 , |
(12.14) |
где I0 – ток в измерительной диагонали;
R0 – внутреннее сопротивление прибора, включенного в измерительную диагональ.
Значение тока I0 для схемы первой симметрии оценивается по выражению (12.10), приведенному выше. Для дальнейшего анализа выражение (12.10) удобно преобразовать, разделив числитель и знаменатель на R1 и введя обозна-
чениеε = R1 . Тогда выражение (12.10) примет вид
R1
I0 |
=U |
|
ε |
|
, |
(12.15) |
4R |
+ 2R + 2R |
|||||
|
|
0 |
1 |
4 |
|
|
где ε – относительное измерение сопротивления датчика. Подставляя в (12.14) значение тока I0, получим
P0 |
=U 2ε2 |
|
R0 |
|
|
|
(12.16) |
|
(4R +2R +2R ) |
2 |
|
||||||
|
|
|
|
|
||||
|
0 |
1 |
4 |
|
|
|
||
Как показано выше, чувствительность мостовой схемы по мощности S(P0) |
||||||||
может быть оценена (при принятых допущениях) соотношением (12.17). |
|
|||||||
|
S(P0 ) = |
P0 |
. |
|
|
|
(12.17) |
|
|
|
|
|
|
||||
|
|
|
R |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
Таким образом, при ε = сonst чувствительность мостовой схемы прямо пропорциональна мощности, потребляемой в ее измерительной диагонали. Очевидно, что при ε = сonst P0→max (см. (12.16), приведенное выше), если
207

U→max, а R4→0. Примем, что U =сonst и максимально возможно для рассматриваемой мостовой схемы, а R4 = 0. Тогда выражение (12.16) принимает вид
P0 |
=U 2ε2 |
|
R0 |
|
, |
(12.18) |
(4R +2R ) |
2 |
|||||
|
|
|
|
|
||
|
0 |
1 |
|
|
|
|
где U = const, ε = const, R1 = const.
Для оценки значения R0 необходимо исследовать соотношение (12.18) на
максимум. Для этого, как известно, |
надо найти производную |
dP0 |
и приравнять |
||||||||||||||
dR0 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ее нулю. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
dP |
=U 2ε2 |
1 (4R +2R )2 − R 2 (4R + 2R ) 4 |
= 0 . |
|
|
|
||||||||
|
|
|
0 |
0 |
1 |
0 |
|
|
0 |
1 |
(12.19) |
||||||
dR |
|
(4R |
+ |
2R ) |
2 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
0 |
|
|
0 |
|
1 |
|
|
|
|
|
|
|
|
||||
Дробь равна нулю, если ноль – ее числитель. В числителе U ≠ 0, ε ≠ 0 (по |
|||||||||||||||||
условию). Приравниваем нулю оставшийся сомножитель числителя. |
|||||||||||||||||
|
|
|
|
(4R0+2 R1)2 – 8R0(4R0+2 R1) = 0. |
|
|
|
(12.20) |
|||||||||
|
|
|
|
(4R0+2 R1)(4R0+2 R1–8R0) = 0. |
|
|
|
(12.21) |
|||||||||
Если произведение двух сомножителей равно нулю, то ноль – один из со- |
|||||||||||||||||
множителей или равны нулю оба сомножителя. |
|
|
|
|
|
|
|
|
|||||||||
Приравнивая к нулю первый сомножитель соотношения (12.21), получим |
|||||||||||||||||
R0 = − |
1 |
R1 и, приравнивая к нулю второй сомножитель, получим |
R0 = |
1 |
R1 . От- |
||||||||||||
|
|
||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|||
рицательное значение сопротивления физического смысла не имеет, и отрицательный корень уравнения (12.21) отбрасывается.
Таким образом, при заданном исходном (начальном) сопротивлении датчика R, заданном и постоянном его абсолютном приращении R (или заданном и постоянном относительном приращении ε) мостовая схема первой симметрии имеет максимальную чувствительность, если выполняются следующие условия:
U → max, R2 = R1 , R3 = R4 → 0, R0 = 12 R1 .
208
Схемы второй симметрии Мощность, выделяемая в измерительной диагонали мостовой схемы (не-
зависимо от вида симметрии), определяется соотношением (12.14), а ток в этой же диагонали для схемы второй симметрии – соотношением (12.11).
Для дальнейшего анализа выражение (12.11) удобно преобразовать, раз-
делив числитель и знаменатель на R1·R4 и введя обозначение ε = |
R1 . |
|||||
|
|
|
|
|
|
R |
|
|
|
|
|
|
1 |
В этом случае выражение (12.11) принимает вид |
|
|
||||
I0 =U |
|
|
ε |
|
, |
(12.22) |
R0 |
|
(R1 + R4 )2 |
+2(R1 + R4 ) |
|||
|
R R |
|
|
|||
|
|
|
|
|
||
|
1 |
4 |
|
|
|
|
где ε – относительное изменение сопротивления датчика.
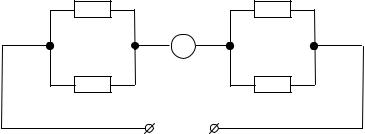
Преобразуем принципиальную электрическую схему четырехплечего измерительного моста, представленную на рис. 12.1, и представим ее в виде схемы, приведенной на рис. 12.2.
Рис. 12.2. Эквивалентная принципиальная схема четырехплечего моста постоянного тока
На схеме (см. рис. 12.2) величина Е является некоторой эквивалентной ЭДС, зависящей от напряжения питания U и параметров мостовой схемы.
Рис. 12.2 позволяет заключить, что измеритель «G» питается через некоторое эквивалентное сопротивление RЭ, определяемое соотношением (12.3).
RЭ = |
R1R2 |
|
+ |
R3R4 |
|
. |
(12.23) |
|
R + R |
R + R |
|||||||
|
|
|
|
|||||
|
1 |
2 |
|
3 |
4 |
|
|
|
Учитывая, что для мостовой схемы второй симметрии R1 = R3 и R2 = R4, получим
209

RЭ′ = 2 |
R1 R4 |
. |
(12.24) |
||
|
|||||
|
R |
+ R |
4 |
|
|
|
1 |
|
|
|
|
Для оптимального согласования нагрузки с сопротивлением источника сигнала необходимо, как известно, чтобы сопротивление нагрузки равнялось сопротивлению источника сигнала. В нашем случае необходимо, чтобы внутреннее сопротивление R0 прибора G, являющегося нагрузкой для мостовой схемы, равнялось сопротивлению Rэ′, являющемуся сопротивлением эквива-
лентного источника питания с ЭДС (Е).
R0 = RЭ′ = 2 |
R1 R4 |
. |
|
|
(12.25) |
||||||
|
|
|
|||||||||
|
|
|
|
R |
+ R |
4 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
Подставляя найденное значение R0 в (12.22), получим |
|
||||||||||
I0 |
=U |
|
|
ε |
|
. |
|
|
|
|
|
4(R1 |
+ R4 ) |
|
|
|
|
(12.26) |
|||||
|
|
|
|
|
|
|
|||||
Подставляя найденное значение тока I0 в (12.14), получим для мощности |
|||||||||||
в измерительной диагонали: |
|
|
|
|
|
|
|
|
|
|
|
P0 = I02 R0 |
=U 2 ε2 |
|
|
R1 R4 |
|
= 0 . |
(12.27) |
||||
8(R1 + R4 ) |
3 |
||||||||||
|
|
|
|
|
|
||||||
Для оценки значения R4 необходимо исследовать соотношение (12.27) на
максимум. Для этого, как известно, надо найти первую производную dP0 и dR0
приравнять ее нулю.
dP |
=U 2 ε2 |
R1 8(R1 + R4 )3 − R1R4 24(R1 |
+ R4 )2 1 |
= 0 . |
|
||
0 |
|
|
|
|
(12.28) |
||
dR4 |
64 (R1 + R4 ) |
6 |
|
|
|||
|
|
|
|
|
|
||
Решая уравнение (12.28) относительно R4, получим
R4 |
= |
2 R1 . |
(12.29) |
||
|
|
3 |
|
|
|
Подставляя найденное значение R4 в (12.22), получим |
|
||||
R0 |
= |
2 |
R1 . |
(12.30) |
|
3 |
|||||
|
|
|
|
||
|
210 |
|
|
||