

Izmeritelnye_preobrazovateli_Mironov
.pdfСхемы с тремя датчиками
Датчики в первом, втором и третьем плечах схемы При анализе схемы в этом случае предполагается, что датчики с началь-
ными (исходными) сопротивлениями R1 , R2 , R3 расположены в первом, вто-
ром и третьем плечах схемы (см. рис. 13.2). Приращения сопротивлений датчи-
ков удовлетворяют условию R1 = − R2 = − R3 = R . В четвертом плече схемы установлено постоянное сопротивление R4 . Предполагается также, что в исходном положении мостовая схема уравновешена и соответственно выполня-
ется условие R1 R4 = R2 R3 . С |
учетом |
принятых допущений, |
выражение |
|||
(13.25) принимает вид |
|
|
|
|
||
|
|
U0 =U |
R (R2 |
+ R3 + R4 ) |
, |
(13.38) |
|
|
|||||
|
|
|
A − R (C + D − B) |
|
||
где А, С, D – постоянные коэффициенты. |
|
|
|
|||
График зависимости U0 = f ( |
R) приведен на рис. 13.10. |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆R≥0
А>0 (C+D-B)>0
0
Рис. 13.10. Зависимость U0 = f ( R) для неравновесной потенциальной мостовой измерительной схемы с тремя датчиками (датчики в первом, втором и третьем плечах схемы)
Соотношение (13.38) и график, приведенный на рис. 13.10, свидетельствуют о том, что неравновесные потенциальные мостовые измерительные схемы с датчиками в первом, втором и третьем плечах схемы нелинейны. Нелинейность схемы сохраняется при размещении трех датчиков в любых других плечах мостовых измерительных схем.
241

Схемы с четырьмя датчиками
При анализе схемы в этом случае предполагается, что датчики с начальными (исходными) сопротивлениями R1 , R2 , R3 , R4 размещены в первом, вто-
ром, третьем и четвертом плечах схемы (см. рис. 13.2). Приращения сопротив-
лений |
|
|
датчиков |
|
|
|
|
|
должны |
удовлетворять |
условию |
|||||||||||
|
R1 |
|
= |
|
− |
R2 |
|
= |
|
− R3 |
|
= |
|
R4 |
|
= |
|
R |
|
. Предполагается также, что в исходном по- |
||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
ложении мостовая схема уравновешена и соответственно выполняется условие R1 R4 = R2 R3 . С учетом принятых допущений выражение (13.25) принимает вид
U0 |
=U |
R (R1 + R2 + R3 + R4 ) |
|
|
A |
(13.39) |
|||
|
|
где A – постоянный коэффициент.
График зависимости U0 = f ( R) приведен на рис. 13.11.
∆R≥0
А>0
Рис. 13.11. Зависимость U0 = f ( R) для неравновесной потенциальной мостовой измерительной схемы с четырьмя датчиками
Соотношение (13.39) и график, приведенный на рис. 13.11, свидетельствуют о том, что неравновесные потенциальные мостовые измерительные схемы с четырьмя датчиками (во всех плечах измерительной схемы) при выполнении принятых допущений линейны.
13.2.3. Выводы и рекомендации
Анализ линейности мостовых измерительных схем (как токовых, так и потенциальных) свидетельствует о том, что при нечетном числе датчиков схе-
242
мы нелинейны, а при четном (два или четыре датчика) могут быть линейны при выполнении ряда условий. Эти условия сводятся к следующему: мостовые схемы должны быть симметричными, исходные (начальные) сопротивления датчиков должны быть одинаковы, а их приращения равными и попарно разнозначными. Подробно условия линейности неравновесных мостовых измерительных схем приведены в пп. 13.2.1 и 13.2.2 настоящего учебного пособия.
Рассмотрим, насколько реализуемы условия линейности неравновесных мостовых измерительных схем, приведенные выше. Оценим возможность практического выполнения этих условий при построении измерительных устройств различного назначения.
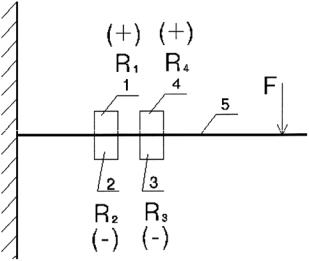
Предположим, что требуется включить в мостовую измерительную схему четыре тензодатчика, наклеенных на балку (рис. 13.12).
Рис. 13.12. Схема размещения тензодатчиков:
1, 2, 3, 4 – тензодатчики; 5 – балка; R1 , R2 , R3 , R4 – сопротивления
тензодатчиков; F – сила, изгибающая балку
Два тензодатчика наклеены сверху и при деформации балки имеют положительные приращения сопротивлений, а два других тензодатчика наклеены снизу и при деформации балки имеют отрицательные приращения сопротивлений.
Другими словами, при деформации балки 5 силой F сопротивления R1 и R4 будут возрастать, сопротивления R3, R4 – уменьшаться.
243
Для реализации условия линейности необходимо, чтобы сопротивления тензодатчиков в исходном состоянии (до деформации) были попарно равны
( R1 = R2 и |
R3 = R4 ), |
а их приращения были попарно равны и разнозначны |
||||||||||||||||
( |
|
R1 |
|
= |
|
− |
R2 |
|
, |
|
R4 |
|
|
= |
|
− R3 |
|
). Очевидно, что эти условия практически вполне |
|
|
|
|
|
|
|
|
|||||||||||
выполнимы. Для этого необходимо использовать однотипные тензодатчики с одинаковыми характеристиками. При этом первый тензодатчик с сопротивлением R1 необходимо включить в первое плечо, второй с сопротивлением R2 –
во второе плечо, третий – в третье и четвертый – в четвертое плечо неравновесной мостовой измерительной схемы, соединив их так, как это показано на рис. 13.2. В этом случае мостовая схема при принятых допущениях будет иметь линейную характеристику.
244
14.РАВНОВЕСНЫЕ МОСТОВЫЕ СХЕМЫ
14.1.Общие положения
В данной главе учебного пособия проведен анализ равновесных мостовых измерительных схем постоянного тока. Рассмотрены различные варианты включения датчиков в равновесные мостовые схемы, примеры расчета схем, а также сделаны выводы по результатам исследований и даны рекомендации по практическому использованию рассматриваемых устройств.
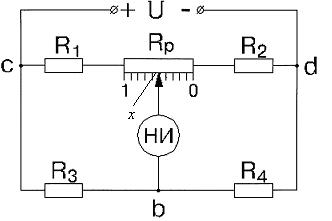
Принципиальная электрическая схема равновесной мостовой схемы приведена на рис. 14.1.
Рис. 14.1. Принципиальная электрическая схема равновесной мостовой измерительной схемы постоянного тока: RР – сопротивление реохорда;
x– координаты движка реохорда; НИ – нуль-индикатор; R1 , R2 , R3 , R4 – электрические сопротивления;
U – напряжение питания
Ниже рассматриваются четыре возможных варианта включения датчиков: датчик в первом плече; датчик во втором плече; датчик в третьем плече; датчик в четвертом плече мостовой схемы. Для каждого случая проведен анализ чувствительности и линейности мостовой схемы, сделаны соответствующие выводы.
14.2. Датчик в первом плече
Предполагается, что датчик с начальным (исходным) сопротивлением RH включен в первое плечо равновесной мостовой измерительной схемы постоянного тока (см. рис. 14.1). Предполагая, что приращение сопротивления датчика
245
составляет R1 , координата x = 0 при положении движка реохорда в крайнем правом положении и координата x =1 при положении движка реохорда в крайнем левом положении, запишем условие равновесия для рассматриваемой схемы.
(RH + R1 + Rp − Rp x) R4 = (R2 |
+ Rp x) R3 . |
(14.1) |
|||||||||||||||||||||||
Раскрыв скобки в уравнении (14.1), сделав приведение подобных (по |
|||||||||||||||||||||||||
принятому допущению RH R4 |
= R2 R3 ) и решив рассматриваемое уравнение |
||||||||||||||||||||||||
относительно x , получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x = |
|
R4 |
|
|
+ R1 |
|
1 |
|
|
|
R4 |
|
|
. |
|
|
(14.2) |
||||||||
R |
+ R |
|
|
|
|
R |
+ R |
|
|
|
|||||||||||||||
|
4 |
|
|
|
|
|
|
|
|
R |
p |
4 |
|
|
|
|
|
||||||||
|
3 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|||||
Введем обозначение: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R4 |
|
= A. |
|
|
|
|
|
|
|
|
(14.3) |
||||||||
|
|
|
R |
|
|
|
4 |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
+ R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
С учетом (14.3) выражение (14.2) принимает вид |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|||||
x = A + |
R1 A |
|
= |
|
|
R1 |
|
|
|
. |
(14.4) |
||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
A 1+ |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
Rp |
|
|
|
|
|
|
Rp |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
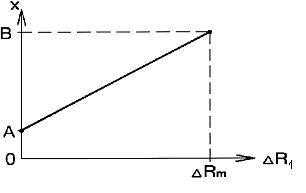
График полученной зависимости приведен на рис. 14.2.
Рис. 14.2. Зависимость x = f ( R1 ) для равновесной мостовой измерительной схемы с датчиком в первом плече
Отметим, что при R1 =0 координата x = A , а при R1 = Rm (где |
Rm – |
максимальное приращение сопротивления датчика) координата x = B , |
где B |
определяется соотношением |
|
246

Сравнивая выражения (14.4) и (14.9) легко убедиться, что усложнение зависимости x = f ( R1 ) за счет отказа от равенства RH R4 = R2 R3 не дает каких– либо существенных преимуществ. Более того, при этом не меняются основные свойства мостовой схемы: x = f ( R1 ) по-прежнему имеет линейный характер, а
чувствительность мостовой схемы зависит от значения сопротивления реохорда RР (чувствительность растет при уменьшении RР и падает при росте этого со-
противления). Исходя из результатов анализов, можно заключить, что отказ от упрощения рассматриваемого соотношения не дает принципиально новых результатов. В силу этого все дальнейшие исследования проведены из предполо-
жения, что в исходном состоянии схемы справедливо равенство RH R4 = R2 R 3.
14.3. Датчик во втором плече
Рассматривается случай включения датчика с начальным (исходным) сопротивлением R2H во второе плечо равновесной мостовой измерительной схе-
мы постоянного тока (см. рис. 14.1). Проведем исследование схемы при следующих допущениях: приращение (изменение) сопротивления датчика равно R ; координата x = 0 при крайнем правом положении движка реохорда; координата x =1 при крайнем левом положении движка реохорда, кроме того, счи-
таем справедливым соотношение |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
R1 R4 |
= R2H R3 , |
|
|
(14.10) |
||||||
где R2H – начальное (исходное) сопротивление датчика ( R2 = R2H + |
R2 ). |
||||||||||||||||||
|
Условие равновесия для исследуемой мостовой схемы запишется в виде |
||||||||||||||||||
|
|
|
|
|
(R1 + Rp − Rp x) R4 |
= (R2H + |
R2 + Rp x) R3 . |
(14.11) |
|||||||||||
|
Раскрывая скобки в уравнении (14.11), сокращая подобные члены и решая |
||||||||||||||||||
рассматриваемое уравнение относительно x , получим |
|
||||||||||||||||||
|
|
|
|
|
|
|
x = |
|
R4 |
|
+ |
R2 |
1 |
|
R4 |
|
, |
(14.12) |
|
|
|
|
|
|
|
|
R |
+ R |
|
|
R + R |
|
|||||||
|
|
|
|
|
|
|
|
4 |
|
|
R |
p |
4 |
|
|
||||
|
|
|
|
|
|
|
|
3 |
|
|
|
|
3 |
|
|
||||
где |
|
R4 |
|
= A; |
R3 |
|
= C . |
|
|
|
|
|
|
|
|
|
|
|
|
R |
+ R |
4 |
R + R |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
3 |
|
|
3 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
248 |
|
|
|
|
|
|
|
Учитывая принятые обозначения, окончательно запишем зависимость x = f ( R2 ):
x = A − R2 |
1 |
C . |
(14.13) |
|
|||
|
Rp |
|
|
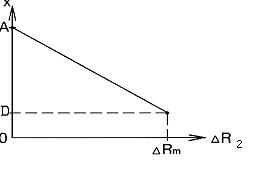
График полученной зависимости приведен на рис. 14.3.
Рис. 14.3. Зависимость x = f ( R2 ) для равновесной мостовой измерительной схемы с датчиком во втором плече
Отметим, что при R2 =0 координата x = A и при R2 = Rm координата
x = D (где Rm – максимальное приращение сопротивления датчика; |
D – ве- |
|
личина, определяемая соотношением (14.13) при R2 = Rm ). |
|
|
D = A − |
Rm C |
(14.14) |
|
RP |
|
Характер зависимости x = f ( R2 ) свидетельствует о том, что при разме-
щении датчика во втором плече равновесная мостовая измерительная схема линейна.
Чувствительность рассматриваемой равновесной мостовой измерительной схемы (в соответствии с соотношением (14.6), приведенным выше) зависит от значения сопротивления реохорда RР . При росте сопротивления реохорда чувствительность мостовой схемы уменьшается, а при снижении сопротивления реохорда чувствительность мостовой схемы возрастает. Отметим, что при росте чувствительности мостовой схемы одновременно уменьшается диапазон возможных изменений сопротивления датчика.
249

14.4. Датчик в третьем плече
Предполагается, что датчик включен в третье плечо равновесной мостовой измерительной схемы (см. рис. 14.1) и имеет в исходном (начальном) состоянии сопротивление R3H .
Исследование мостовой схемы проводится при следующих допущениях:
приращение (изменение) сопротивления датчика равно |
R3 ; координата движка |
реохорда x = 0 при крайнем правом его положении; |
координата движка рео- |
хорда x =1 при крайнем левом его положении; справедливо соотношение |
|
R1 R4 = R2 R3H ( R3 = R3H + R3 ).
Условие равновесия для исследуемой мостовой схемы запишется в виде
(R1 + Rp − Rp x) R4 |
= (R2 |
+ Rp x) (R3H + R3 ) . |
(14.15) |
|||||||||||
Раскрыв скобки в уравнении (14.15), сократив подобные члены и решив |
||||||||||||||
рассматриваемое соотношение относительно x , получим |
|
|
||||||||||||
x = |
|
R4 |
− R3 |
|
1 |
|
|
|
|
R2 |
. |
(14.16) |
||
R |
+ R + R |
R |
p |
|
R |
4 |
+ R + R |
|||||||
|
|
|
|
|
|
|
||||||||
|
3 |
3 |
|
|
|
|
|
|
3 |
|
|
|||
График полученной зависимости x = f ( |
|
R) приведен на рис. 14.4. |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 14.4. Зависимость x = f ( R3 ) для равновесной мостовой измерительной схемы с датчиком в третьем плече
Отметим, что при R3 =0 координата x = A и при R3 = Rm координата x = F , где Rm – максимальное приращение (изменение) сопротивления датчи-
ка; величина A – определяется соотношением (14.17), а величина F – соотно-
шением (14.18).
250