

Izmeritelnye_preobrazovateli_Mironov
.pdfU0 =U |
ε K |
|
. |
(13.12) |
(1+ K) |
2 |
|||
|
|
|
|
Для оценки значения K необходимо исследовать полученное соотноше-
ние (13.12) на максимум. Для этого найдем первую производную dUdK0 и при-
равняем ее нулю.
dU0 |
( |
|
) |
2 |
( |
|
) |
|
|
|
|
|
|
=U ε |
1 1 |
+ K |
|
− K 2 1 |
+ K |
|
1 |
= 0. |
(13.13) |
||
dK |
|
|
|
(1+ K )4 |
|
|
|
|
||||
Произведение нескольких сомножителей равно нулю, если ноль – один из сомножителей. Соотношение (13.13) состоит из трех сомножителей. Первые два сомножителя (U и ε) не равны нулю, т. е. нулю равен третий сомножитель, представляющий собой дробь. Дробь, в свою очередь, равна нулю, если ноль – ее числитель. Приравнивая нулю числитель рассматриваемой дроби, получим
(1 + К)2 − 2К(1 + К)= 0.
Полученное выражение, после приведения подобных, принимает вид
1–К = 0.
Решая полученное уравнение относительно K , находим
K =1. |
(13.14) |
Из (13.14) следует, что R2 = R1 и R3 = R4 .
Таким образом, при заданном сопротивлении датчика и принятых допущениях потенциальная мостовая измерительная схема имеет максимальную чувствительность по напряжению при U → ∞ , R2 = R1 и R3 = R4 .
13.2. Линейность потенциальных мостовых схем
13.2.1. Общие положения
Исследование линейности неравновесных потенциальных мостовых измерительных схем проводится при допущении, что датчики включены во все четыре плеча мостовой схемы (рис. 13.2).
231
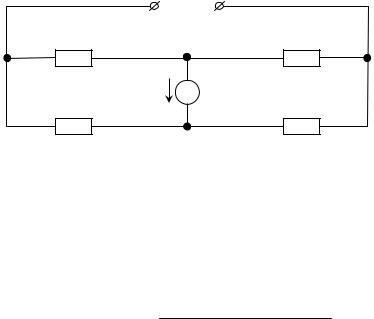
Рис. 13.2. Принципиальная схема неравновесного потенциального моста с четырьмя датчиками
Выведенное выше основное соотношение потенциальной мостовой схемы (11.6) для схемы, приведенной на рис. 13.2, принимает вид
Rg1 Rg 4 − Rg 2 Rg 3 |
|
U 0 = U (Rg1 + Rg 2 )(Rg 3 + Rg 4 ), |
(13.15) |
где U0 – напряжение на измерительной диагонали мостовой схемы;
U – напряжение питания;
R0 – сопротивление прибора G (принято, что R0 → ∞);
Rg1 , Rg 2 , Rg 3 , Rg 4 – сопротивление датчиков.
Дальнейший анализ рассматриваемой мостовой схемы проводится при следующих допущениях:
|
|
Rg1 = R1 + |
R1 , |
(13.16) |
|
|
Rg 2 = R2 + |
R2 , |
(13.17) |
|
|
Rg 3 = R3 + |
R3 , |
(13.18) |
|
|
Rg 4 = R4 + |
R4 , |
(13.19) |
|
|
R1 R4 = R2 R3 , |
(13.20) |
|
где R1 , R2 , R3 , |
R4 |
– начальные сопротивления датчиков; |
|
|
R1 , R2 , R3 , |
R4 |
– приращения сопротивлений датчиков. |
|
|
Изменения сопротивлений датчиков |
R1 , R2 , R3 , |
R4 много меньше со- |
||
противлений самих датчиков, т. е. |
|
|
||
|
|
R1 << R1 , |
(13.21) |
|
|
|
R2 << R2 , |
(13.22) |
|
|
|
232 |
|
|
|
|
|
|
R3 << R3 , |
|
|
|
|
|
(13.23) |
||
|
|
|
|
R4 << R4 , |
|
|
|
|
|
(13.24) |
||
где R1 , R2 , R3 , R4 |
– определены выше. |
|
|
|
|
|
|
|||||
Квадраты и кубы приращений датчиков малы и ими можно пренебречь, |
||||||||||||
т. е. R12 ≈ 0 , R13 ≈ 0 , |
R22 ≈ 0 , |
R23 ≈ 0 и т. д. |
|
|
|
|
|
|
||||
С учетом принятых допущений (13.16) – (13.24) и равенства нулю квадра- |
||||||||||||
тов и кубов приращений датчиков выражение (13.15) принимает вид |
|
|||||||||||
U0 |
=U |
R1 R4 + |
R2 R3 + |
R3 R2 + |
R4 R1 |
, |
(13.25) |
|||||
A + R B + R |
|
|
|
|
||||||||
|
|
2 |
C + R D + R |
4 |
F |
|
||||||
|
|
|
1 |
|
|
3 |
|
|
|
|
||
где U, U0 , R1 , R2 , R3 , |
R4 , |
R1 , |
R2 , |
R3 , R4 определены выше; |
|
|||||||
А = R1 R3 + R1 R4 + R2 R3 + R2 R4 ;
В = С = R3 + R4 ;
D = F = R3 + R2 .
Полученное выражение (13.25) позволяет проанализировать линейность неравновесных потенциальных мостовых схем.
13.2.2. Основные соотношения
Полученное в п. 13.2.1 выражение (13.25) позволяет проанализировать линейность неравновесных потенциальных мостовых измерительных схем (см. рис. 13.2) при использовании одного, двух, трех и четырех датчиков.
Схемы с одним датчиком
При анализе мостовой схемы с одним датчиком предполагается, что датчик с начальным (исходным) сопротивлением R1 расположен в первом плече мостовой схемы. В трех других плечах мостовой схемы установлены постоян-
ные сопротивления R2 , R3 , R4 . Приращение сопротивления датчика |
R1 ≠ 0 . |
||||
Все другие приращения ( R2 , |
R3 , |
R4 ) тождественно равны нулю. |
В этом |
||
случае выражение (13.25) принимает вид |
|
|
|
||
U0 |
=U |
R1 R4 |
|
, |
(13.26) |
A + R |
B |
||||
|
|
1 |
|
|
|
где U0 , U, А, В, R1 , R4 – определены выше.
233
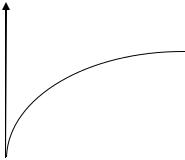
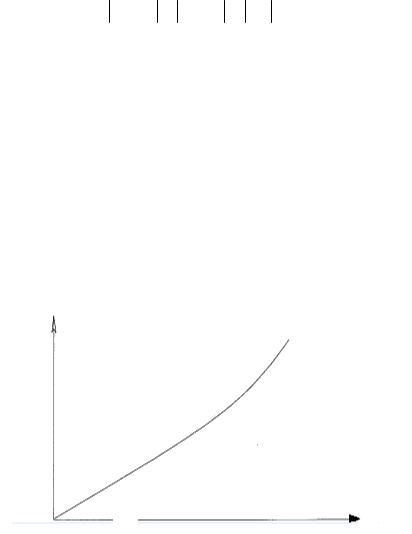
График зависимости U0 = f ( R1 ) приведен на рис. 13.3.
U0
A>0
R1≥0
0  R1
R1
Рис. 13.3. Зависимость U0 = f ( R1 ) для потенциальной мостовой измерительной схемы с одним датчиком (датчик в первом плече схемы)
Соотношение (13.26) и график, приведенный на рис. 13.3, свидетельствуют о том, что неравновесная потенциальная мостовая измерительная схема с одним датчиком, расположенным в первом плече схемы, нелинейна. Этот вывод также справедлив при расположении одного датчика в любом другом плече схемы. Последнее утверждение дается без доказательств, но оно может быть легко получено студентами самостоятельно при анализе соотношения (13.25).
Схемы с двумя датчиками
Датчики в первом и втором плечах схемы При анализе схемы с двумя датчиками принимаются следующие допуще-
ния (см. рис. 13.2): начальные (исходные) сопротивления датчиков R1 и R2 ; в
исходном положении мостовая схема уравновешена (т. е. R1 R4 = R2 R3 ); при-
ращения сопротивлений датчиков удовлетворяют условию |
|
R1 |
|
= |
|
− R2 |
|
= |
|
R |
|
; |
||
|
|
|
|
|
|
|||||||||
приращения R3 и R4 тождественно равны нулю. С учетом изложенных до- |
||||||||||||||
пущений выражение (13.25) принимает вид |
|
|
|
|
|
|
|
|
|
|
|
|
||
U0 =U |
R (R3 + R4 ) |
(13.27) |
||||||||||||
A |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
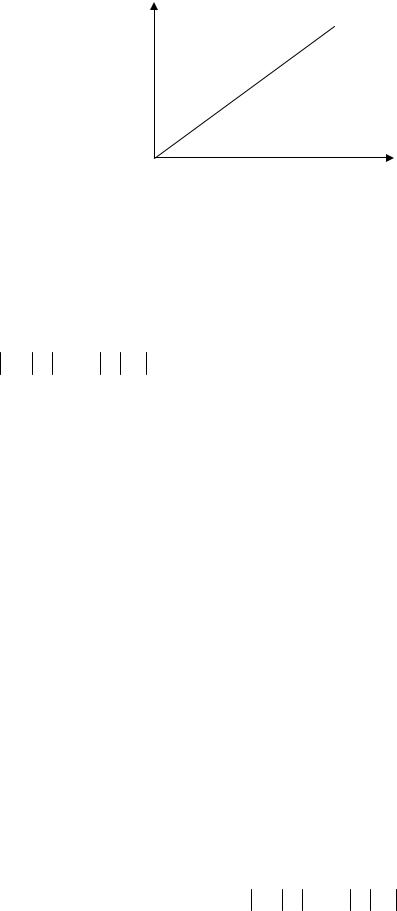
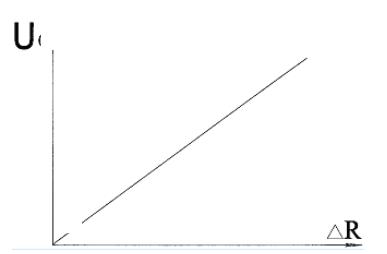
где A – постоянный коэффициент (определен выше). График зависимости U0 = f ( R) приведен на рис. 13.4.
234
U0
A>0
R1≥0
R
0
Рис. 3.4. Зависимость U0 = f ( R) для потенциальной мостовой измерительной схемы с двумя датчиками (датчики в первом и втором плечах схемы)
Соотношение (13.27) и график, приведенный на рис. 13.4, свидетельствуют о том, что неравновесные потенциальные мостовые измерительные схемы с двумя датчиками (в первом и втором плечах) линейны, если выполняется условие R1 = − R2 = R .
Таким образом, для линейности неравновесной потенциальной мостовой измерительной схемы с двумя датчиками, размещенными в первом и втором плечах схемы, необходимо, чтобы приращения сопротивлений датчиков R1 и
R2 были равны между собой по модулю и противоположны по знаку.
Отметим, что положительные приращения сопротивлений датчиков соответствуют увеличению их сопротивлений, а отрицательные приращения соответствуют уменьшению сопротивлений датчиков. Для выполнения условия линейности схемы необходимо, чтобы при увеличении сопротивления датчика в первом плече на R сопротивление датчика во втором плече уменьшалось бы на эту же величину.
Датчики в первом и третьем плечах схемы При анализе схемы в этом случае предполагается, что датчики с началь-
ными (исходными) сопротивлениями R1 и R3 расположены в первом и третьем плечах мостовой схемы. В двух других плечах мостовой схемы установлены постоянные сопротивления R2 и R4 (см. рис. 13.2). Приращения сопротивлений датчиков удовлетворяют условию R1 = − R3 = R . Приращения R2 и R4
тождественно равны нулю. Мостовая схема в исходном состоянии уравновеше-
235
на (т. е. R1 R4 = R2 R3 ). С учетом изложенных допущений выражение (13.25)
принимает вид
U0 |
=U |
R (R2 |
+ R4 ) |
, |
(13.28) |
||
A + |
R (B − D) |
||||||
|
|
|
|
||||
где A, B, D – постоянные коэффициенты (определены выше).
Выражение (13.28) получено из предположения, что приращения сопротивлений датчиков равны и разнозначны. Очевидно, что это предположение может быть выполнено, если использованы одинаковые датчики с равными начальными сопротивлениями. Кроме того, для обеспечения равновесия мостовой схемы необходимо, чтобы были равны сопротивления, установленные во втором и четвертом плечах схемы. Таким образом, должны быть правомерны следующие равенства:
|
R1 = R3 , |
|
|
|
(13.29) |
||
|
R2 = R4 . |
|
|
|
(13.30) |
||
С учетом (13.29) и (13.30) выражение (13.28) принимает вид |
|
||||||
U0 =U |
|
|
R (R2 + R4 ) |
. |
(13.31) |
||
|
|
|
|
||||
|
|
|
A − |
R |
|
||
Учитывая, что A >> R2 , окончательно получим |
|
||||||
U0 =U |
|
R (R2 |
+ R4 ) |
(13.32) |
|||
|
A |
|
|
|
|||
|
|
|
|
|
|
|
|
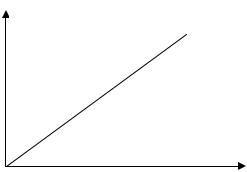
График зависимости U0 = f ( R) приведен на рис. 13.5.
U0
R≥0
A>0
0
Рис. 13.5. Зависимость U = f( R) для неравновесной потенциальной мостовой измерительной схемы с двумя датчиками (датчики в первом и третьем плечах схемы)
236

Соотношение (13.31) и график, приведенный на рис. 13.5, свидетельствуют о том, что неравновесные потенциальные мостовые измерительные схемы с двумя датчиками (в первом и третьем плечах) при выполнении принятых допущений линейны.
Датчики в первом и четвертом плечах схемы При анализе схемы в этом случае предполагается, что датчики с началь-
ными (исходными) сопротивлениями R1 и R4 расположены в первом и четвер-
том плечах мостовой схемы (см. рис. 13.2). В двух других плечах схемы установлены постоянные сопротивления R2 и R3 (приращения R2 и R3 соответ-
ственно равны нулю). Приращения сопротивлений датчиков удовлетворяют ус-
ловию: R1 = R4 = R . Предполагается также, что в исходном состоянии мостовая схема уравновешена (т. е. R1 R4 = R2 R3 ). С учетом изложенных до-
пущений выражение (13.25) принимает вид
U0 |
=U |
R (R1 + R4 ) |
|
A + R (B + F ) |
|||
|
|
где А, В, F – постоянные величины.
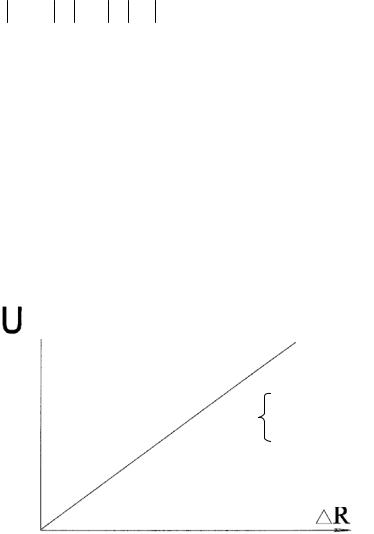
График зависимости U0 = f ( R) приведен на рис. 13.6.
∆R≥0
A>0
(B+F)>0
Рис. 13.6. Зависимость U0 = f ( R) для неравновесной потенциальной мостовой измерительной схемы с двумя датчиками (датчики в первом и четвертом плечах схемы)
237
Соотношение (13.33) и график, приведенный на рис. 13.6, свидетельствуют о том, что неравновесные потенциальные мостовые измерительные схемы с датчиками в первом и четвертом плечах нелинейны.
Датчики во втором и третьем плечах схемы При анализе схемы в этом случае предполагается, что датчики с началь-
ными (исходными) сопротивлениями R2 и R3 расположены во втором и треть-
ем плечах схемы (см. рис. 13.2). Приращения сопротивлений датчиков удовле-
творяют условию: − R2 = − R3 = R . В двух других плечах схемы установ-
лены постоянные сопротивления R1 и R4 , и их приращения соответственно равны нулю. Предполагается также, что в исходном состоянии мостовая схема уравновешена (т. е. R1 R4 = R2 R3 ). С учетом изложенных допущений выраже-
ние (13.25) принимает вид
|
|
U0 =U |
R (R2 + R3 ) |
, |
(13.34) |
|
|
A − R (B + D) |
|||
|
|
|
|
|
|
где А, В, D – постоянные коэффициенты. |
|
|
|||
График зависимости U0 = f ( |
R) приведен на рис. 13.7. |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
∆R≥0
A>0
(B+D)>0
Рис. 13.7. Зависимость U0 = f ( R) для неравновесной потенциальной мостовой измерительной схемы с двумя датчиками (датчики во втором и третьем плечах схемы)
Соотношение (13.34) и график, приведенный на рис. 13.7, свидетельствуют о том, что неравновесные потенциальные мостовые измерительные схемы с датчиками во втором и третьем плечах нелинейны.
238
Датчики во втором и четвертом плечах схемы При анализе схемы в этом случае предполагается, что датчики с началь-
ными (исходными) сопротивлениями R1 и R4 расположены во втором и четвер-
том плечах схемы (см. рис. 13.2). Приращения сопротивлений датчиков удовле-
творяют условию |
|
− R2 |
|
= |
|
R4 |
|
= |
|
|
R |
|
. В двух других плечах схемы установле- |
|
|
|
|
|
|
||||||||
ны постоянные сопротивления R2 |
и R4 , и их приращения соответственно рав- |
||||||||||||
ны нулю. Предполагается также, что в исходном состоянии мостовая схема уравновешена (т. е. R1 R4 = R2 R3 ). С учетом изложенных допущений выраже-
ние (13.25) принимает вид
U0 |
=U |
R (R1 |
+ R3 ) |
, |
(13.35) |
|||
A + |
R (F − |
В) |
||||||
|
|
|
|
|||||
где А, В, F – постоянные коэффициенты.
Принимая, что R1 = R4 , R2 = R3 окончательно получим
U0 |
=U |
R (R2 |
+ R4 ) |
(13.36) |
A |
|
|||
|
|
|
|
График зависимости U0 = f ( R) приведен на рис. 13.8.
∆R≥0 A>0
Рис. 13.8. Зависимость U0 = f ( R) для неравновесной потенциальной мостовой измерительной схемы с двумя датчиками (датчики во втором и четвертом плечах схемы)
Соотношение (13.36) и график, приведенный на рис. 13.8, свидетельствуют о том, что неравновесные потенциальные мостовые измерительные схемы с
239
датчиками во втором и четвертом плечах при выполнении принятых допущений линейны.
Датчики в третьем и четвертом плечах схемы При анализе схемы в этом случае предполагается, что датчики с началь-
ными (исходными) сопротивлениями R3 и R4 расположены в третьем и четвер-
том плечах схемы (см. рис. 13.2). Приращения сопротивлений датчиков удовле-
творяют условию − R3 = R4 = R . В двух других плечах схемы установле-
ны постоянные сопротивления, и их приращения соответственно равны нулю. Предполагается также, что в исходном положении мостовая схема уравновешена и выполняется условие R1 R4 = R2 R3 . С учетом принятых допущений вы-
ражение (13.25) принимает вид
U0 |
=U |
R (R1 + R2 ) |
|
|
A |
(13.37) |
|||
|
|
где A – постоянный коэффициент.
График зависимости U0 = f ( R) приведен на рис. 13.9.
∆R≥0
А>0
0
Рис. 13.9. Зависимость U0 = f ( R) для неравновесной потенциальной мостовой измерительной схемы с двумя датчиками (датчики в третьем и четвертом плечах схемы)
Соотношение (13.37) и график, приведенный на рис. 13.9, свидетельствуют о том, что неравновесные потенциальные мостовые измерительные схемы с датчиками в третьем и четвертом плечах схемы при выполнении принятых допущений линейны.
240