

Izmeritelnye_preobrazovateli_Mironov
.pdfТаким образом, для линейности мостовой измерительной схемы с двумя датчиками, размещенными в первом и третьем плечах схемы, необходимо вы-
полнение двух условий: |
|
|
|
|
1) сопротивления плеч мостовой схемы |
R1 , |
R2 , |
R3 , R4 при |
R = 0 |
должны быть равны между собой; |
|
|
|
|
2) приращения сопротивлений датчиков |
R1 и |
R3 |
должны быть равны |
|
между собой и противоположны по знаку. |
|
|
|
|
Отметим, что анализ проведен для случая, когда приращение R1 |
поло- |
|||
жительное, а приращение R3 – отрицательное.
Датчики во втором и четвертом плечах схемы Предполагается, что датчики с начальными (исходными) сопротивления-
ми R2 и R4 расположены соответственно во втором и четвертом плечах мосто-
вой схемы. В двух других плечах мостовой схемы установлены постоянные сопротивления R1 и R3 (см. рис. 12.4). Приращения сопротивлений датчиков R2 и
R4 |
удовлетворяют условию |
|
− R2 |
|
= |
|
R4 |
|
= |
|
|
R |
|
. Приращения сопротивлений |
|||
|
|
|
|
|
|
||||||||||||
R1 |
и R3 тождественно равны нулю. С учетом изложенных допущений выра- |
||||||||||||||||
жение (12.49) принимает вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
I0 |
=U |
|
|
R (R1 + R4 ) |
(12.54) |
|||||||||||
|
A +(B + F ) |
|
|
R |
|||||||||||||
|
|
|
|
|
|
|
|
||||||||||
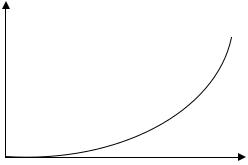
График зависимости I0 = f ( R) приведен на рис. 12.9.
I 0
F = C
F ≠ C
(F −C) > 0
R
Рис. 12.9. Зависимость I0 = f ( R) для неравновесной мостовой схемы с двумя датчиками (датчики во втором и четвертом плечах мостовой схемы)
221
Анализ зависимости I0 = f ( R) позволяет сделать вывод о том, что в об-
щем случае (при F ≠ C ) мостовая схема нелинейна. В частном же случае (при F = C ) рассматриваемая мостовая схема линейна (см. рис. 12.9). Сравнение выражений F и C показывает, что F = C , если R1 = R2 = R3 = R4 , т. е. сопротив-
ления всех плеч мостовой схемы (в исходном положении при R = 0 ) должны быть равны между собой.
Таким образом, для линейности мостовой измерительной схемы с двумя датчиками, размещенными во втором и четвертом плечах схемы, необходимо
выполнение двух условий: |
|
|
1) сопротивления плеч мостовой схемы R1 , |
R2 , |
R3 , R4 при R = 0 |
должны быть равны между собой; |
|
|
2) приращения сопротивлений датчиков R2 и |
R4 |
должны быть равны |
между собой и противоположны по знаку. |
|
|
Датчики в третьем и четвертом плечах схемы |
|
|
Предполагается, что датчики с начальными (исходными) сопротивлениями R3 и R4 расположены соответственно в третьем и четвертом плечах мосто-
вой схемы. В двух других плечах мостовой схемы установлены постоянные сопротивления R1 и R2 (см. рис. 12.4). Приращения сопротивлений датчиков R3 и
R4 |
удовлетворяют условию |
|
− R3 |
|
= |
|
R4 |
|
= |
|
R |
|
. Приращения сопротивлений |
|||
|
|
|
|
|
|
|||||||||||
R1 |
и R2 тождественно равны нулю. С учетом изложенных допущений выра- |
|||||||||||||||
жение (12.49) принимает вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I0 |
|
=U |
|
|
R (R2 + R4 ) |
. |
(12.55) |
||||||||
|
|
|
A + (B − D) R |
|||||||||||||
|
|
|
|
|
|
|
||||||||||
График зависимости I0 = f ( R) приведен на рис. 12.10.
222

I0
F = D
F ≠ D
(F − D) > 0
0 |
R |
|
Рис. 12.10. Зависимость I0 = f ( R) для неравновесной мостовой схемы с двумя датчиками (датчики в третьем и четвертом плечах мостовой схемы)
Анализ зависимости I0 = f ( R) позволяет сделать вывод о том, что в об-
щем случае (при F ≠ D ) мостовая схема нелинейна. В частном же случае (при F = D ) рассматриваемая мостовая схема линейна. Сравнение выражений F и D показывает, что F = D , если R1 = R2 , R3 = R4 , т. е. для линейности схемы в рассматриваемом случае необходимо использовать мостовую схему 1-й симметрии.
Таким образом, для линейности мостовой измерительной схемы с двумя датчиками, размещенными в третьем и четвертом плечах схемы, необходимо
выполнение двух условий: |
|
|
1) сопротивления плеч мостовой схемы R1 , |
R2 , |
R3 , R4 при R = 0 |
должны удовлетворять условию 1-й симметрии; |
|
|
2) приращения сопротивлений датчиков R2 и |
R4 |
должны быть равны |
между собой и противоположны по знаку. |
|
|
Датчики во втором и третьем плечах схемы |
|
|
Предполагается, что датчики с начальными (исходными) сопротивлениями R2 и R3 расположены соответственно во втором и третьем плечах мостовой схемы. В двух других плечах мостовой схемы установлены постоянные сопротивления R1 и R4 (см. рис. 12.4). Приращения сопротивлений датчиков R2 и R3
удовлетворяют условию − R2 = − R3 = R . Приращения сопротивлений R1
иR4 тождественно равны нулю. С учетом изложенных допущений выражение
(12.49) принимает вид
223
I0 |
=U |
R (R3 + R2 ) |
. |
(12.56) |
||
A +(C + D) |
R |
|||||
|
|
|
|
|||
График зависимости I0 = f ( R) приведен на рис. 12.11.
I0
(C + D) > 0
0 |
R |
|
Рис. 12.11. Зависимость I0 = f ( R) для неравновесной мостовой схемы с двумя датчиками (датчики во втором и третьем плечах мостовой схемы)
Анализ зависимости I0 = f ( R) позволяет сделать вывод о том, что мос-
товая измерительная схема с двумя датчиками во втором и третьем плечах схемы нелинейна при любом соотношении параметров.
Схемы с тремя датчиками
Предполагается, что датчики с начальными (исходными) сопротивлениями R1 , R2 , R3 расположены соответственно в первом, во втором и в третьем плечах мостовой схемы. В четвертом плече мостовой схемы установлено постоянное сопротивление R4 (см. рис. 12.4). Приращения датчиков R1 , R2 , R3
удовлетворяют условию |
|
R1 |
|
= |
|
− R2 |
|
|
= |
|
− R3 |
|
= |
|
R |
|
. Приращение сопротивле- |
||
|
|
|
|
|
|
|
|
||||||||||||
ния R4 тождественно равно нулю (т.е. |
|
R4 = 0 ). С учетом изложенных допуще- |
|||||||||||||||||
ний выражение (12.49) принимает вид |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
I0 =U |
R (R3 + R2 + R4 ) |
. |
(12.57) |
||||||||||||||
|
|
A +(B −C − D) |
|
R |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
График зависимости (12.57) приведен на рис. 12.12.
224

I0
0  R
R
Рис. 12.12. Зависимость I0 = f ( R) для неравновесной мостовой измерительной схемы с тремя датчиками (датчики в первом, втором и третьем плечах мостовой схемы)
Анализ зависимости I0 = f ( R) позволяет сделать вывод о том, что мос-
товая измерительная схема с тремя датчиками в первом, втором и третьем плечах схемы нелинейна при любом соотношении параметров.
Схемы с четырьмя датчиками
При анализе схемы с четырьмя датчиками будем полагать, что датчики включены во все плечи мостовой измерительной схемы и имеют в исходном
состоянии сопротивления R1 , |
R2 , R3 , |
R4 (датчик с сопротивлением R1 |
включен |
||||||||||||||||||||||
в первое плечо моста, R2 |
– во второе, |
R3 – в третье, R4 – в четвертое). Прира- |
|||||||||||||||||||||||
щения |
сопротивлений |
|
|
датчиков |
должны |
удовлетворять |
условию: |
||||||||||||||||||
|
R1 |
|
= |
|
− |
R2 |
|
= |
|
− R3 |
|
= |
|
|
R4 |
|
= |
|
R |
|
. С учетом принятых допущений выражение |
||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
(12.49) принимает вид |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I0 =U |
|
|
R (R1 + R3 + R2 + R4 ) |
. |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A +(B |
−C − D + F ) |
R |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
График зависимости (12.58) для различных соотношений между B, C, F, D имеет вид, приведенный на рис. 12.13
I0 |
B = C |
|
|
|
F = D B ≠ C |
|
F ≠ D |
|
(B −C − D + F) > 0 |
0 
Рис. 12.13. Зависимость I0 = f ( R) для неравновесной мостовой измерительной схемы с четырьмя датчиками (датчики во всех плечах мостовой схемы)
225
Нетрудно видеть, что в общем случае (при B ≠ C и F ≠ D ) неравновесная мостовая схема нелинейна. Равенства F = D и B = C возможны при R1 = R2 и
R3 = R4 , и в этом случае рассматриваемая схема линейна.
Таким образом, для линейности неравновесной мостовой измерительной схемы с четырьмя датчиками необходимо, чтобы сопротивления датчиков в первом и втором, третьем и четвертом плечах мостовой измерительной схемы были в исходном состоянии равны, а их приращения были равны и попарно разнозначны.
12.2.3. Выводы и рекомендации
Проведенные исследования линейности неравновесных токовых мостовых измерительных схем позволяют сделать вполне определенные выводы и дать практические рекомендации по включению датчиков в то или иное плечо мостовой схемы.
Ниже приводятся выводы и даются рекомендации при использовании одного, двух, трех и четырех датчиков.
1.Неравновесная токовая мостовая схема с одним датчиком нелинейна при любом включении датчика (в первое, второе, третье или четвертое плечо мостовой схемы). Схема с одним датчиком может быть рекомендована лишь при малых изменениях сопротивления датчика и при малых диапазонах измерений.
2.Мостовая схема с двумя датчиками может быть линейна, если датчики включены в первое и второе или третье и четвертое плечо мостовой схемы. При этом начальные (исходные) сопротивления датчиков должны быть равны, а их приращения равны и разнозначны (т. е. при росте сопротивления одного датчика сопротивление второго датчика должно на это же значение уменьшаться). При несоблюдении этих условий линейность мостовой схемы нарушается.
3.Мостовая схема с тремя датчиками нелинейна при любом их включении. Использовать схему с тремя датчиками не рекомендуется.
4.Мостовая схема с четырьмя датчиками может быть линейной при соблюдении ряда условий: используемые датчики должны иметь равные началь-
226
ные (исходные) сопротивления, а их приращения должны быть равными и попарно разнозначными, т. е. датчики в первом и четвертом плечах мостовой схемы должны иметь положительные приращения, а во втором и третьем – отрицательные. При несоблюдении этих условий линейность мостовой схемы нарушается.
227
13.НЕРАВНОВЕСНЫЕ ПОТЕНЦИАЛЬНЫЕ МОСТОВЫЕ СХЕМЫ
13.1.Чувствительность потенциальных мостовых схем
13.1.1. Общие положения
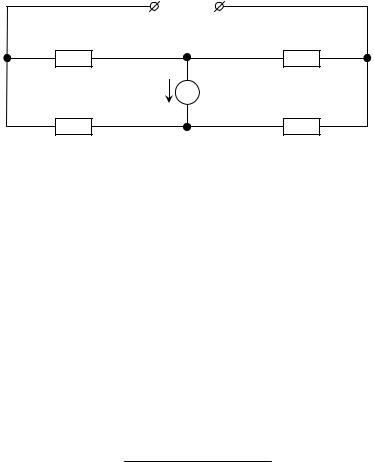
Исследование чувствительности неравновесных потенциальных мостовых измерительных схем проводится при допущении, что используется один датчик, включенный в первое плечо мостовой схемы (рис. 13.1).
Рис. 13.1. Потенциальная мостовая измерительная схема с одним датчиком
В п. 11.1 учебного пособия было отмечено, что мостовая схема считается потенциальной, если сопротивление прибора G, включенного в измерительную диагональ моста, много больше сопротивлений плеч мостовой схемы. В этом же пункте сделан вывод основного соотношения потенциальной мостовой схемы (см. выражение (11.6)).
Для мостовой схемы, приведенной на рис. 13.1, выражение (11.6) принимает вид
Rg R4 − R2 R3 |
|
U0 =U (Rg + R2 )(R3 + R4 ), |
(13.1) |
где U0 – напряжение на измерительной диагонали мостовой схемы;
U – напряжение питания;
Rg – сопротивление датчика;
R2 , R3 , R4 – сопротивление плеч моста.
Дальнейший анализ рассматриваемой мостовой схемы проводится при следующих допущениях:
228
Rg = R1 + R1 , |
(13.2) |
R1 << R1 , |
(13.3) |
R1 R4 = R2 R3 , |
(13.4) |
где R1 – начальное (исходное) сопротивление датчика;
R1 – измерение сопротивления датчика;
Rg , R2 , R3 , R4 – определены выше.
С учетом принятых допущений (13.2), (13.3) и (13.4) выражение (13.1) преобразуется в соотношение
U0 |
=U |
|
R1 R4 |
|
|
, |
(13.5) |
|||
(R |
+ R |
2 |
)(R + R |
4 |
) |
|||||
|
|
|
|
|||||||
|
|
1 |
|
3 |
|
|
|
|||
где U0 , U, R1 , R1 , R2 , R3 , R4 – определены выше.
13.1.2. Основные соотношения
В п. 11.2 учебного пособия даны точное и приближенное определения чувствительности неравновесной потенциальной мостовой измерительной схемы. В данном пункте учебного пособия используется приближенное значение чувствительности по напряжению, приведенное ниже.
S(U0 )≈ |
U0 |
, |
(13.6) |
|
R |
|
|
|
1 |
|
|
где S(U 0 ) – чувствительность по напряжению;
R1 – изменение сопротивления датчика;
U0 – изменение напряжения в измерительной диагонали мостовой схемы при изменении сопротивления датчика на R1 .
Дальнейший анализ проводится для оценки оптимальных параметров потенциальных мостовых измерительных схем, позволяющих получить максимальную чувствительность при заданных допущениях, т. е. при заданных усло-
виях |
(13.2)–(13.4) и при заданном значении |
R1 можно найти значения U, R2 , |
R3 и |
R4 , при которых чувствительность S(U0 ) |
максимальна. Из (13.6) следует, |
229
что при R1 = const чувствительность максимальна при максимальном значении
приращения U0 , которое определяется соотношением |
|
|
|
U0 =U0 −U0H , |
(13.7) |
где U 0H |
– напряжение на измерительной диагонали в исходном состоянии мос- |
|
товой схемы (при R1 =0); |
|
|
U0 , U0 |
– определены выше. |
|
Поскольку в исходном состоянии рассматриваемая мостовая схема уравновешена, то U 0H =0 и U0 =U0 (см. выражение (13.7)).
Другими словами, для принятых допущений чувствительность S(U0 )→max, если напряжение U0 , определяемое соотношением (13.5), также стремится к максимальному значению.
Для дальнейшего анализа чувствительности рассматриваемой мостовой схемы по напряжению удобно разделить числитель и знаменатель выражения
(13.5) на R1 R4 и ввести обозначениеε = |
|
|
|
R1 . |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
U0 =U |
|
|
|
|
|
|
|
|
|
ε |
|
|
|
|
|
|||
|
R2 |
|
|
|
|
R3 |
|
(13.8) |
||||||||||
|
|
|
|
|
||||||||||||||
|
|
|
1+ |
|
|
1 |
+ |
|
|
|||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
R1 |
|
|
R4 |
|
||||||||||
Обозначим отношение |
R2 |
через K . |
|
|
|
|
|
|||||||||||
R |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
|
= K . |
|
|
|
(13.9) |
||||||
|
|
|
|
|
R1 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Тогда, в силу равновесия моста в исходном состоянии, справедливы со- |
||||||||||||||||||
отношения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R1 R4 |
= R2 R3 , |
|
(13.10) |
|||||||||||||
|
|
|
|
|
R3 |
|
= |
|
1 |
. |
|
|
|
(13.11) |
||||
|
|
|
|
|
R |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
K |
|
|
|
|
|
|||||
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Подставляя (13.9) и (13.11) в уравнение (13.8), получим
230