

4 .3. Алгебраический метод определения симметричных автоколебаний и их устойчивости
Рассмотрим систему с одной нелинейностью с линейной частью, обладающей фильтрующими свойствами.
J(A)
W(j)
g x y -





Рис. 4.3.1
Уравнение
нелинейности y=f(x);
линейной части для свободного движения:
![]() (4.3.1)
(4.3.1)
Уравнение
замкнутой системы:
![]()
При условии, что x(s) изменяется по гармоническому закону, после гармонической линеаризации можно записать:
![]() (4.3.2)
(4.3.2)
С
учётом (4.3.2) можно записать характеристическое
уравнение замкнутой системы в виде
![]() (4.3.3)
(4.3.3)
или после подстановки (4.3.1) в виде
![]() (4.3.4)
(4.3.4)
В выражении (4.3.4), выделяя действительную и мнимую части, получим:
![]() (4.3.5)
(4.3.5)
Приравнивая действительную и мнимую части нулю, получаем систему
 . (4.3.6)
. (4.3.6)
Затем система уравнений (4.3.6) решается относительно двух неизвестных : амплитуды А и частоты автоколебаний
Если амплитуда и частота получатся комплексными или мнимыми числами, то периодический процесс в системе отсутствует, а если действительными числами – то присутствует.
После определения параметров периодического процесса необходимо проверить его устойчивость. Данная задача в системе , описываемой уравнением высокого порядка весьма сложна, поэтому воспользуемся приближенными методами. Дадим малые отклонения А и от их значений в периодическом режиме А+ΔА и ω+Δω.
Исходное
движение
![]() . (4.3.7)
. (4.3.7)
Варьированное
движение
![]() (4.3.8)
(4.3.8)
Выражение (4.3.8) описывает колебательный процесс вблизи исходного периодического режима (4.3.7).
Из анализа (4.3.8) следует: что для устойчивости автоколебаний необходимо, чтобы А и имели одинаковые знаки. При А> 0 и > 0 варьированный процесс будет затухать и стремиться к исходному. При А< 0 и < 0 уменьшенный варьированный процесс будет расходиться и стремиться к исходному.
Для увязывания этого условия с параметрами линейной части и нелинейного элемента (для вывода критерия) воспользуемся символической формой записи периодического режима.
Исходный режим (4.3.5) представим в виде:
![]() . (4.3.9)
. (4.3.9)
Варьированный режим
![]() (4.3.10)
(4.3.10)
Аналогично выражению (4.3.5) для варьированного движения можно записать:
![]() (4.3.11)
(4.3.11)
Разложим (4.3.11) в ряд Тейлора в окрестности А и , рассмотрим только линейный член и получим:
![]() (4.3.12)
(4.3.12)
* – означает подстановку значений А и ω, соответствующих исследуемому автоколебательному режиму.
Выделим в выражении (4.3.12) мнимую и действительную часть, почленно приравняем к 0, исключим из полученных уравнений Δω и, разрешив эту систему относительно , найдем в результате выражение, связывающее параметры ζ и ΔА.
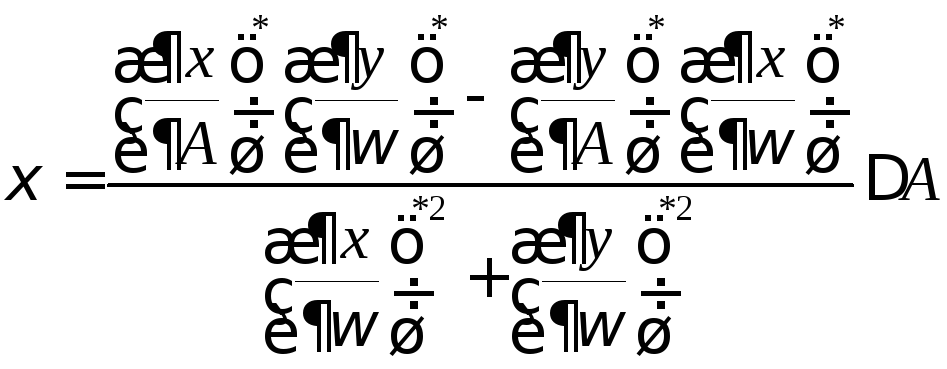 (4.3.13)
(4.3.13)
Поскольку знаменатель функция четная, то знак ζ зависит только от числителя, тогда критерий устойчивости автоколебаний имеет вид:
![]() (4.3.14)
(4.3.14)
Для определения автоколебаний алгебраическим методом необходимо:
записать характеристическое уравнение замкнутой системы;
выделить в нем действительную и мнимую части и приравнять их к нулю;
разрешить эту систему относительно амплитуды и частоты автоколебаний;
найти частные производные действительной и мнимой частей по А и и подставить в выражения производных значения А и .
Проверить выполнение условия (4.3.14)