

6 .2. Системы с переменной структурой (спс)
Характерной особенностью СПС является наличие в них ключевого элемента, скачкообразно изменяющего один из параметров системы.
Наибольшее распространение имеет статический ключевой элемент (рис.6.2.1, 6.2.2).
K1
K.Э. x




y





K2
sign x
y

Рис. 6.2.1 Рис. 6.2.2
- управляющий сигнал
1. Ключевой элемент имеет два параллельных канала и описывается выражениями:
 (6.2.1)
(6.2.1)
Обычно в СПС используется два частных случая КЭ:
а) инвертирующий
КЭ при К1=0,
К2=0.
![]()
предназначается
для инвертирования сигнала х при ![]() .,
.,
б)
размыкающий ключевой элемент при ![]()
![]() .
.
Такой
КЭ разрывает цепь передачи сигнала х
при ![]() .
.
При К2=0 и К1 =К, КЭ превращается в линейное звено у=Кх.
Ключевой элемент может быть включен в прямую цепь (последовательно) рис.6.2.3, параллельную цепь (рис.6.2.5) или в цепь ОС (рис.6.2.4). Он может быть естественно присутствующим или специально вводимым для улучшения динамических свойств системы..
W2

K.Э. -
W1







Рис. 6.2.3 Рис. 89
W2
W1







- -


K.Э.




Рис. 6.2.4
W2
W1
W3

- -









K.Э.




Рис. 6.2.5
Сигнал управления
обычно формируют в виде произведения:
![]() ,
где х1
и х2
– либо
естественно присутствующие, либо
специально вводимые сигналы. Широкое
применение этого закона обусловлено
относительной простотой реализации
КЭ, в котором анализ знаков х1
и х2
выполняется
с помощью логических устройств.
,
где х1
и х2
– либо
естественно присутствующие, либо
специально вводимые сигналы. Широкое
применение этого закона обусловлено
относительной простотой реализации
КЭ, в котором анализ знаков х1
и х2
выполняется
с помощью логических устройств.
Структурная схема последовательного ключевого корректирующего устройства (ККУ) представлена на рис. 6.2.6.
K.Э.
WК1
WК2
x y x1 x2











γ=х1∙х2
МУ
(множительное устройство)
Рис. 6.2.6
Звенья с ПФ WК1
и WК2
формируют
сигналы х1
и х2.
Для
того чтобы ККУ вносило в систему
положительные фазовые сдвиги передаточные
функции WК1,
WК2
должны быть
дифференциального типа. Дифференцирующие
звенья существенно увеличивают уровень
помех. Более рациональным является
использование, вместо сигналов х1
и х2,
сигналов , естественно присутствующих
в системе. Так, например, если КЭ включается
на выходе инерционного звена с ПФ
![]() ,
то целесообразно применять схему
включения ККУ (рис.6.2.7а). После эквивалентных
преобразований структурной схемы из
рис.(6.2.7б) видно, что сигнал
,
то целесообразно применять схему
включения ККУ (рис.6.2.7а). После эквивалентных
преобразований структурной схемы из
рис.(6.2.7б) видно, что сигнал![]() .
В этом случае исключается дифференцирующее
звеноWК1,
а его роль выполняет инерционное звено
W1
системы.
.
В этом случае исключается дифференцирующее
звеноWК1,
а его роль выполняет инерционное звено
W1
системы.
K.Э.
W1
K.Э. х1 х












WК2
WК2
x2





x2 x1


![]()
x1


Рис. 6.2.7
а Рис. 6.2.7
б
Если линейная часть системы обладает фильтрующими свойствами, то для анализа СПС удобно применять метод гармонической линеаризации, а СПС не выше второго порядка обычно анализируют методом фазовой плоскости.
6.3. Исследование системы с переменной структурой методом фазовой плоскости
Переменная структура системы дает дополнительные возможности получения различных желаемых процессов автоматического управления и регулирования.
В системе (рис.6.3.1) переменная структура создается КЭ.
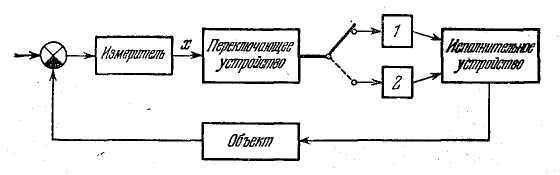
Рис.6.3.1
Рассмотрим переходный процесс (без внешнего воздействия). Пусть измерительное и исполнительное устройства идеальные и вместе с регулируемым объектом описываются передаточной функцией
![]() .
(6.3.1)
.
(6.3.1)
КЭ описывается выражением (6.2.1).
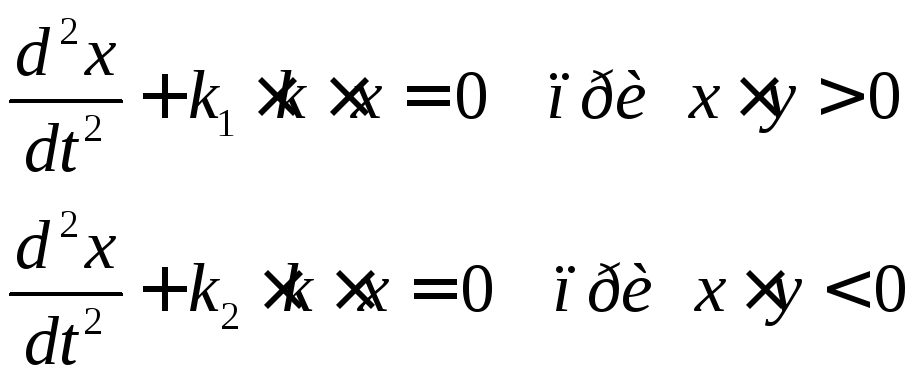
Звенья же 1 и 2 характеризуются коэффициентами усиления k1 и k2 соответственно. Тогда уравнение динамики замкнутой системы при включении звена 1 запишется в виде
![]() (6.3.2)
(6.3.2)
а при включении звена 2:
![]() (6.3.3)
(6.3.3)
Каждое из этих уравнений является уравнением неустойчивой автоколебательной системы. Картины фазовых траекторий в соответствии с ( 6.3.2 и 6.3.3) показаны на рис. 6.3.2, а и б соответственно.
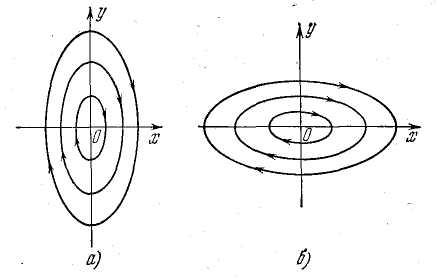
Рис.6.3.2
Обозначим
![]() .
Введем следующий закон переключений.
Пусть звено1
включается
при
.
Введем следующий закон переключений.
Пусть звено1
включается
при
![]() ,
а звено 2 – при
,
а звено 2 – при![]() ,
т. е. имеем уравнения
,
т. е. имеем уравнения
В этом
случае в I
квадранте фазовой плоскости
![]() берется
дуга эллипса из рис. 6.3.2,а;
в
IV
квадранте - из рис. 6.3..2, б;
в
III
-
снова из рис. 6.3.2, а
и
т. д.
берется
дуга эллипса из рис. 6.3.2,а;
в
IV
квадранте - из рис. 6.3..2, б;
в
III
-
снова из рис. 6.3.2, а
и
т. д.
Как видно по рис. 6.3..3, получается затухающий колебательный процесс, т. е. за счет переменности структуры система становится устойчивой.
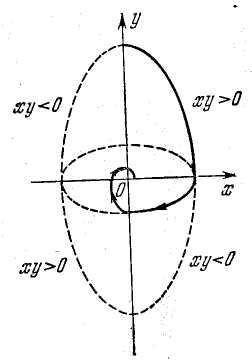
Рис.6.3.3