

2 .2. Исследование релейной системы
Рассмотрим фазовую плоскость системы, в которую входит объект управления с самовыравниванием, безынерционный чувствительный элемент, золотник с ЖОС и серводвигатель постоянной скорости с симметричной мертвой зоной.
В качестве примера рассмотрим регулятор давления воздуха в баллоне.
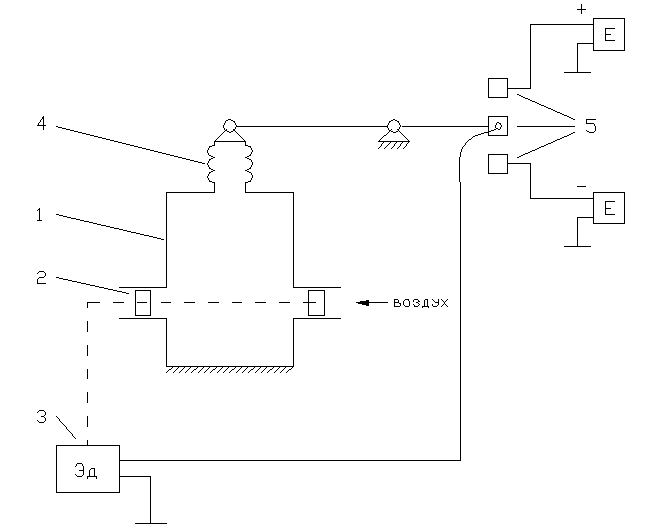
Рис. 2.2.1
1 – баллон
2 – заслонки
3 – электродвигатель
4 – сильфонный манометр
5 – релейно-контактное устройство
Количество поступающего в баллон 1 воздуха регулируется заслонками 2, которые приводятся в движение электродвигателем 3. Управление электродвигателем осуществляется релейно-контактным устройством 5, играющим роль золотника, а чувствительным элементом служит сильфонный манометр 4.
Уравнение объекта управления с самовыравниванием
![]() (2.2.1)
(2.2.1)
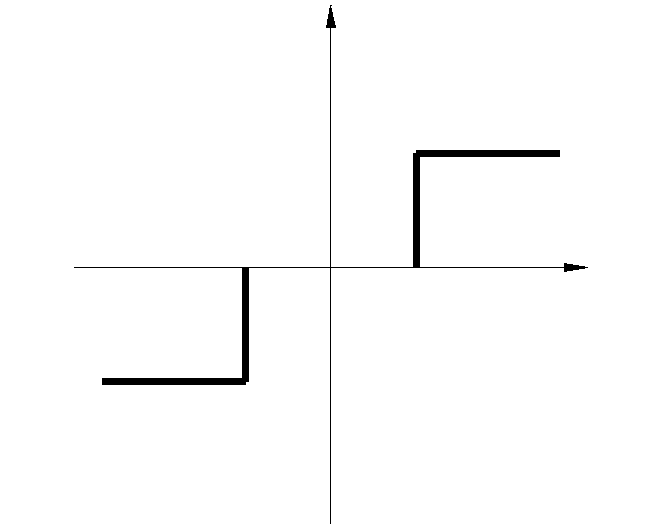
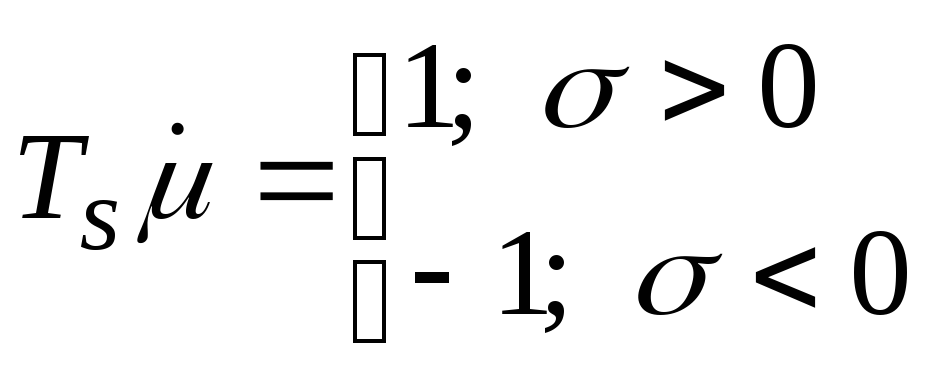
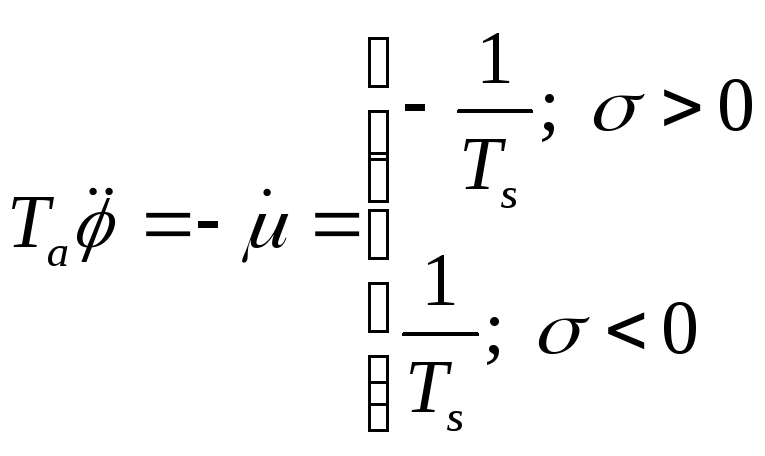
Уравнение серводвигателя с симметричной мертвой зоной:
![]()
![]()
0
-0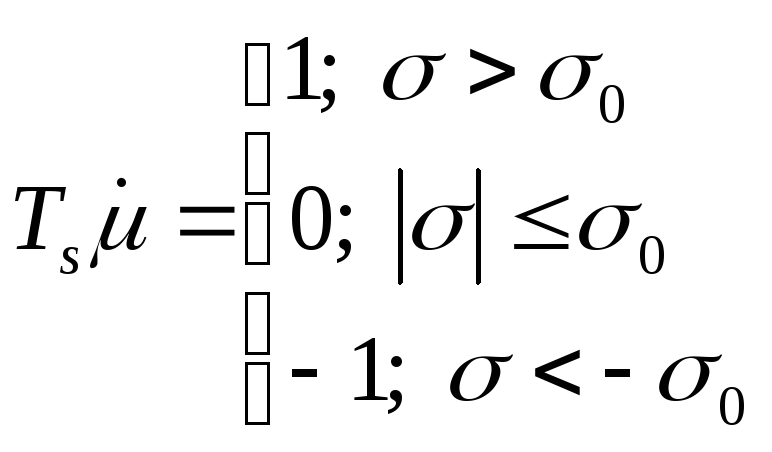
![]()
Рис. 2.2.2
Уравнение безынерционного чувствительного элемента:
![]() (2.2.3)
(2.2.3)
Уравнение золотника с ЖООС:
![]() (2.2.4)
(2.2.4)
Избавимся от промежуточных переменных μ, σ, η
Продифференцируем уравнение (2.2.1)
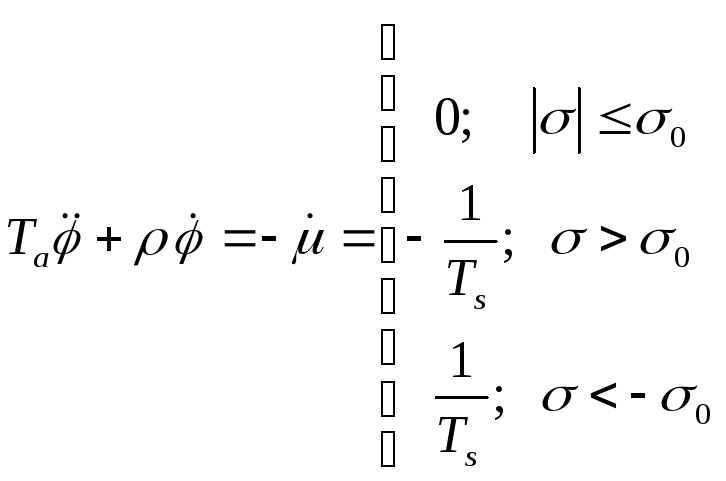
Избавимся от σ:
![]() Таким образом
условия переключения имеют вид:
Таким образом
условия переключения имеют вид:
![]()
![]()
 (2.2.5)
(2.2.5)
Введем новые
переменные: ![]()
 (2.2.6)
(2.2.6)
![]() . (2.2.7)
. (2.2.7)
Исключим переменную t:
(2.2.8)
(2.2.9)
(2.2.10)
Рассмотрим на примере выражения (2.2.10) процедуру интегрирования
(2.2.11)
(2.2.12)
(2.2.13)
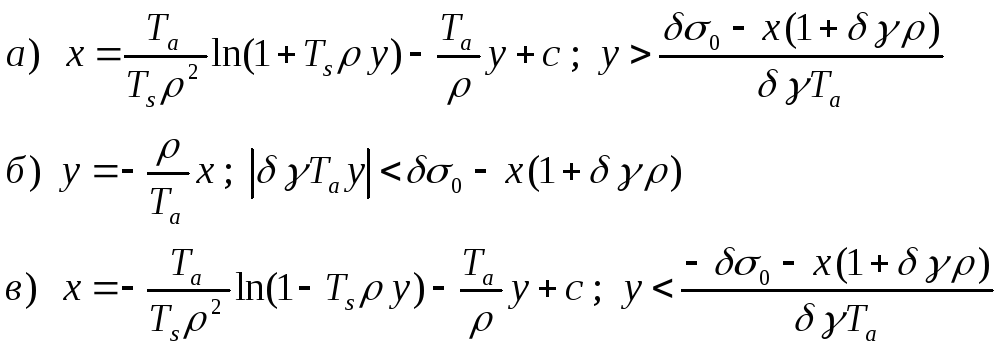
Заменим в условиях определения знаки неравенства равенствами
и получим две линии переключения:
(2.2.17)
(2.2.18)
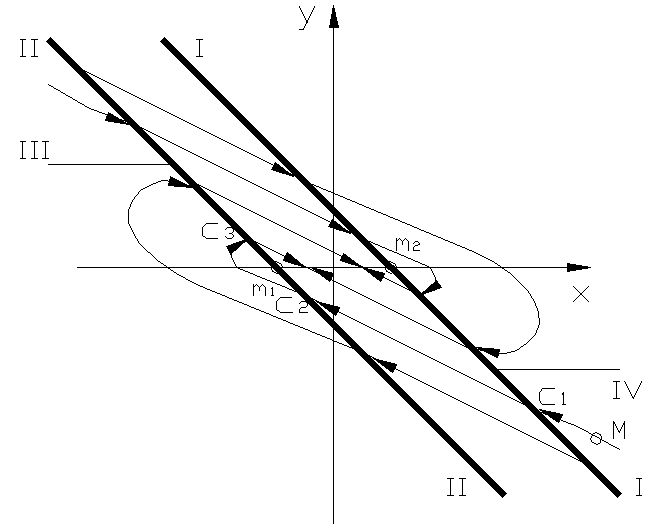
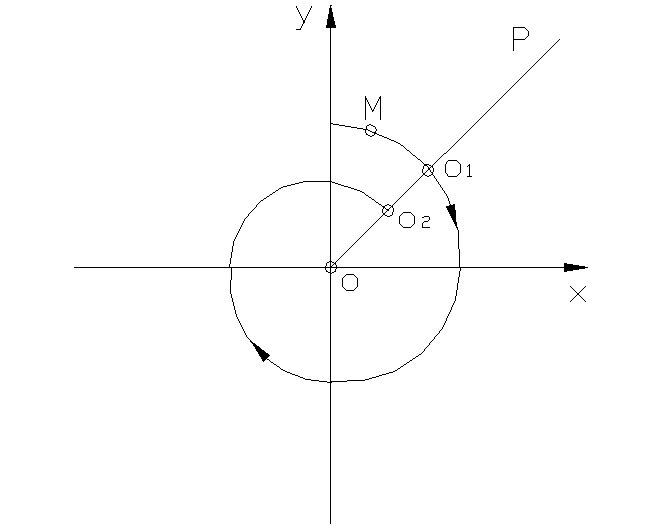
Рис. 2.2.3
I-I – линии переключения (2.2.17)
II-II – линии переключения (2.2.18)
Область справа от линии переключения I-I заполнена фазовыми траекториями семейства 2.2.11. Область слева от линии переключения II-II заполнена фазовыми траекториями семейства 2.2.13, а между линиями переключения – прямыми семейства 2.2.12.
Кроме двух линий переключения I-I и II-II появляются особые прямые III и IV в семействе (2.2.11) и (2.2.13), особенность их в том, что фазовые траектории, находящиеся в области над или под ними не могут перейти через них.
Рассмотрим
движение точки М семейства (2.2.11), ![]() .
.
В точке С1 серводвигатель выключается и движение в системе происходит за счет инерции объекта по траектории С1С2 семейства (2..212). В точке С2 происходит обратное включение серводвигателя, он реверсируется и движение идет по траектории С2С3 семейства (2.2.13). В точке С3 серводвигатель выключается, и изображающая точка по прямой (2.2.12) попадает на отрезок покоя m1m2, и движение заканчивается. Система устойчива, но наличие отрезка покоя, соответствующего состоянию равновесия, может привести к увеличению установившейся ошибки сверх требуемой величины.
2 .3. Многолистное фазовое пространство
В рассмотренном ранее случае система описывалась дифференциальным уравнением, в котором правая часть является однозначной функцией своих аргументов. Однако, в нелинейностях типа люфт, зазор или сухое трение правая часть является неоднозначной функцией аргументов и не может быть отражена на обычной фазовой плоскости (на одном листе). В этих случаях используется многолистное фазовое пространство.
Рассмотрим систему, содержащую объект без самовыравнивания (2.3.1), серводвигатель постоянной скорости (2.3.2), золотник (2.3.4) и безынерционный чувствительный элемент(2.3.3).
Уравнение объекта
![]() . (2.3.1)
. (2.3.1)

![]()
У
![]()
 (2.3.2)
(2.3.2)
![]()
Уравнение чувствительного
элемента
Рис. 2.3.1 Рис. 2.3.2![]() .
(2.3.3)
.
(2.3.3)
У
![]() (2.3.4),
(2.3.4),
представляет собой биссектрису
координатного угла.
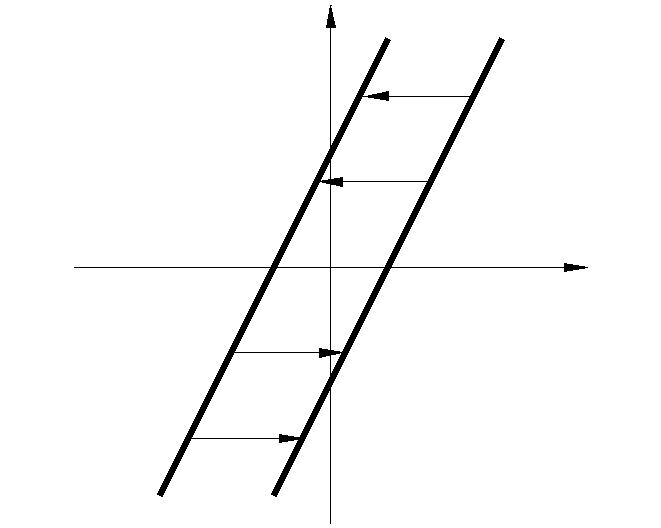
Предположим, что между ЧЭ и золотником имеется люфт. Величина люфта равна m, тогда график люфта (рис. 2.3.3) выглядит следующим образом:
a1
0.5 m
-
0.5 m
a2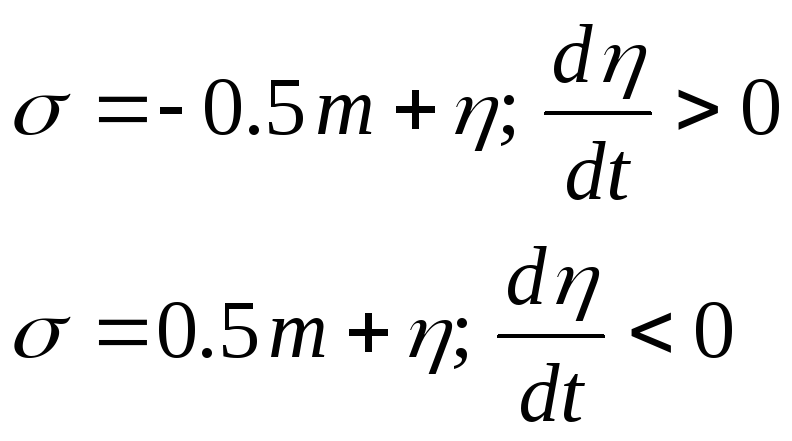
a4
a3
Рис. 2.3.3
Объединяя уравнения (2.3.1), (2.3.2), (2.3.3), (2.3.5), исключим промежуточные переменные , , , тогда получим:
 (2.3.6)
(2.3.6)
Исключим переменную .
![]()
В результате получим систему уравнений:
 (2.3.9)
(2.3.9)
Произведём замену переменных
![]()
 (2.3.10)
(2.3.10)
![]() (2.3.11)
(2.3.11)
Избавимся от времени t, разделим (2.3.10) на (2.3.11), получим дифференциальные уравнения фазовых траекторий:
 (2.3.12)
(2.3.12)
После интегрирования получим два семейства парабол
(2.3.13)
(2.3.14)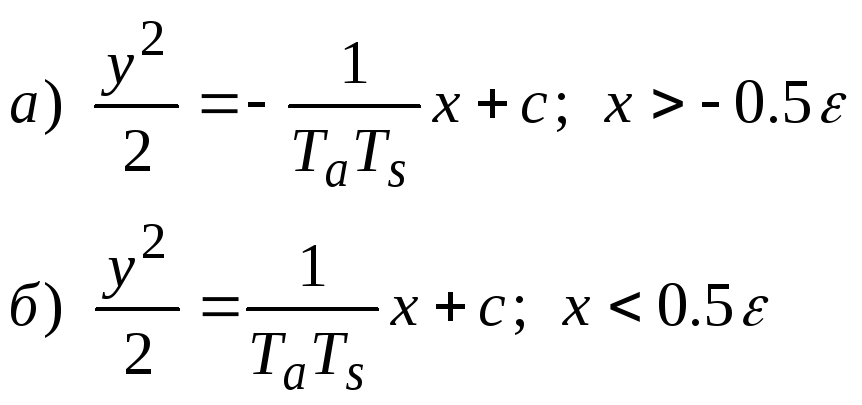
0.5
-0.5 Рис. 2.3.4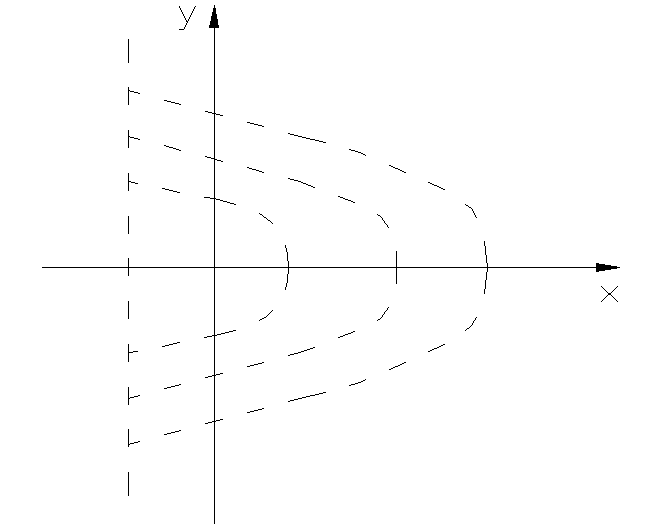
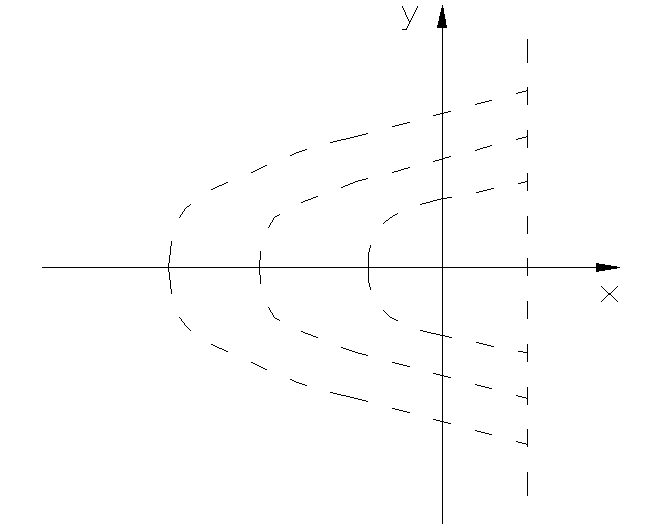
Как видно из рис.
2.3.4 фазовые траектории семейства 2.3.13 и
2.3.14 перекрывают друг друга в диапазоне
![]() ,
что создает неоднозначность в построении
фазового портрета системы. Для устранения
неоднозначности в этой полосе, фазовые
траектории строят на разных листах,
потом их накладываются один на другой
так, чтобы совпали координатные оси.
,
что создает неоднозначность в построении
фазового портрета системы. Для устранения
неоднозначности в этой полосе, фазовые
траектории строят на разных листах,
потом их накладываются один на другой
так, чтобы совпали координатные оси.
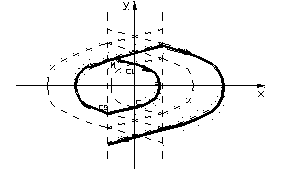
Лист для парабол
семейства (2.3.14) Лист для парабол
семейства (2.3.13)
Рис. 2.3.5
Если бы не было люфта, то точка М, двигаясь по траектории С1С2 семейства (2.3.13), переходила бы на траекторию семейства (2.3.14) в точке С2 и движение на фазовом портрете происходило бы по замкнутой траектории (устойчивый предельный цикл), а в системе бы возникали автоколебания. Из-за наличия люфта точка М переходит с одного листа на другой только на границах соответствующего листа x=0.5 и x= -0.5 . При этом получаемая расходящаяся траектория соответствует неустойчивым процессам в системе (расходящиеся колебания).
В итоге делаем вывод, что люфт – явление вредное и, обычно, приводит к автоколебаниям в системе.
Г
- метод связан с методом фазовых плоскостей.
П
Рис. 3.1 Рис. 31а Рис. 31б
Исходной точке О1 соответствует определенное расстояние от до начала координат. Если обозначить расстояние ОО1=S, а расстояние от начала координат до последующий точки обозначить через S` (ОО2=S`), то точечному преобразованию полупрямой ОР можно поставить в соответствие на плоскости S`S некоторую кривую S`=f(S), называемую функцией последования.

Неподвижным точкам точечного преобразования (предельного цикла) соответствует преобразование S`=S или биссектриса координатного угла.
Взаимное расположение функции последования и биссектрисы S`=S определяет характер движения в системе.
Рис. 3.2
Если функция последования f(S)= f2(S) лежит ниже биссектрисы S`=S, то процессы затухающие, система устойчива.
Если f(S)=f1(S) лежит выше биссектрисы S`=S, то процессы расходящиеся, система неустойчива (автоколебаний нет).
Если f(S) пересекает биссектрису S`=S, то возможны автоколебания.
Для определения характера движения ( устойчивости) можно построить лестницу Ламерея .
Для этого необходимо отложить на оси абсцисс значение S, затем провести вертикальную прямую до кривой последования и найти значение S’. Принять это значение S’ за новое S (провести горизонтальную линию до биссектрисы S’= S) и повторить построение, и по которой изображающая точка стремится к началу координат, или удаляется от него.
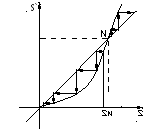
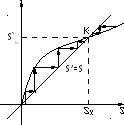
Рис. 3.3
а Рис. 3.3
б
В
точке К(рис.3.3а)
выполняется условие ![]() - колебания устойчивы.
- колебания устойчивы.
В
точке N
выполняется условие ![]() , что соответствует неустойчивым
автоколебаниям.
, что соответствует неустойчивым
автоколебаниям.
Функцию последования S`=f(S) в большинстве случаев легче представить в параметрической форме. При этом в качестве параметра используется время τ – время прохождения изображающей точкой по фазовой траектории расстояния от исходной точки О1 до последующей точки О2. При этом S=f1(τ) , S`=f2(τ). Для определения характера движения в этом случае также строится лестница Ламерея.
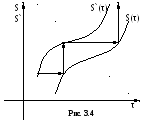
Если функции S`(τ) и S(τ) не пересекаются, то автоколебаний нет.
Если S(τ)> S`(τ), то колебания затухающие, система устойчива.
Если S(τ)< S`(τ), то колебания расходящиеся (рис.3.4), система неустойчива.
Рис. 32 Рис. 33а Рис. 34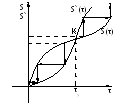
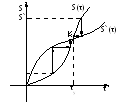
Рис. 3.5а Рис. 3.5б
Если
кривыеS=f1(τ) ,
S`=f2(τ)
пересекаются, то возможны автоколебания.
При выполнении условия ![]() -
автоколебания неустойчивы (точка К,
рис.3.5а). И автоколебании устойчивы при
-
автоколебания неустойчивы (точка К,
рис.3.5а). И автоколебании устойчивы при
![]() (точка К, рис.3.5.б).
(точка К, рис.3.5.б).
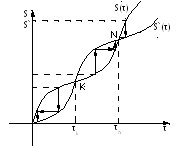
Рис. 3.6
На рис.3.6 показан случай двух точек пересечения кривыхS=f1(τ) и S`=f2(τ). При этом в точке K – неустойчивый предельный цикл, в точке N – устойчивый предельный цикл.
Система устойчива в «малом» и автоколебательна в «большом».
Функция последования находится путем интегрирования дифференциальных уравнений системы. Этот метод также как и метод фазовой плоскости используется для систем не выше второго порядка.
Г
Исходные положения метода гармонической линеаризации
(гармонического баланса)
В отличие от ранее рассмотренных методов этот метод приближенный, но для него нет ограничения на порядок системы.
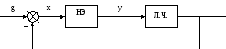
Рис. 4.1.1 Рис. 37
Нелинейная система представляется в одноконтурном виде (рис.4.1.1) и содержит нелинейный элемент, описываемый выражением
![]() - уравнение
нелинейного элемента. (4.1.1)
- уравнение
нелинейного элемента. (4.1.1)
и линейной частью с передаточной функцией
![]() (4.1.2)
(4.1.2)
причем степень полинома знаменателя N(s) больше степени полинома числителя M(s).
Метод основан на следующих допущениях:
х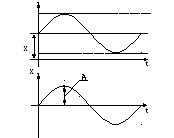
1. Переменная х на входе нелинейного элемента изменяется по гармоническому закону, при этом колебания могут быть симметричными (рис.4.1.2)
или
несимметричными![]()
Если входное воздействие g(t)=0, то колебания могут возникнуть по причине собственных свойств системы.
Рис. 4.1.2
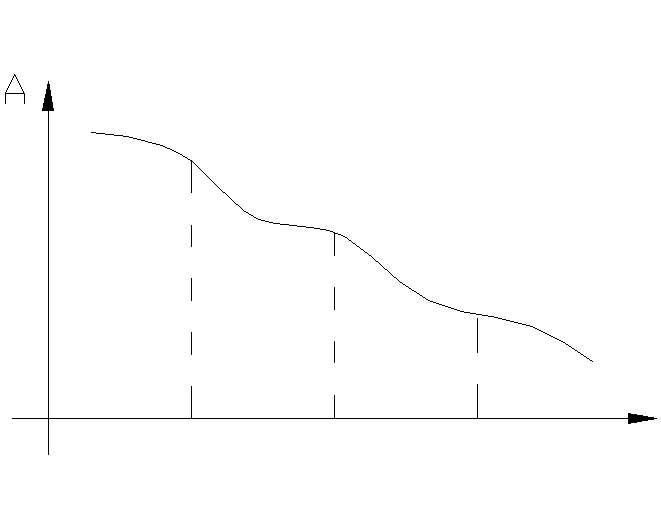
2. Линейная часть системы обладает фильтрующими свойствами (ослабление или подавление) высших гармоник)
1
2
3
Рис. 4.1.3
Поскольку степень
полинома знаменателя N(s)
больше степени полинома числителя M(s)
амплитудная частотная характеристика
A()=|W(j)|
стремится к нулю при ![]() .
.
Еслиω1-частота первой гармоники (рис.4.1.3), а ω2, ω3 - - соответственно второй, третьей, то свойство фильтра линейной части системы состоит в выполнении условия
![]() (4.1.3)
(4.1.3)
Результатом фильтрующих свойств линейной части является уменьшение амплитуд высших гармоник, при этом переменная x на входе НЭ близка к синусоиде.
В 1934г. Крылов и Боголюбов предложили метод определения параметров периодических режимов, основанный на допущении, что система обладая фильтрующими или резонансными свойствами имеет периодический характер движения. Поэтому исследование периодических режимов можно вести только на основной гармонике.
Пусть на вход НЭ с уравнением (4.1.1) подается гармонический сигнал
![]() (4.1.4)
(4.1.4)
С учетом (4.1.4) переменная у на выходе нелинейного элемента представляет собой периодическую негармоническую функцию. Разложим эту функцию в ряд Фурье.
 (4.1.5)
(4.1.5)
![]() - .(4.1.6)
- .(4.1.6)
определяет постоянную составляющую на выходе НЭ
В случае симметричных колебаний постоянная составляющая на выходе нелинейного элемента y0=0.
Высшие гармоники можно отбросить по двум причинам:
1. Уменьшение амплитуд вследствие фильтрующих свойств линейной части.
2. В разложении Фурье высшие гармоники имеют меньшую амплитуду, по сравнению с первой гармоникой.
Недостаточная обоснованность этого действия приводит к приближённости метода.
Из (4.1.4) можно
выразить:
![]() , (4.1.7)
, (4.1.7)
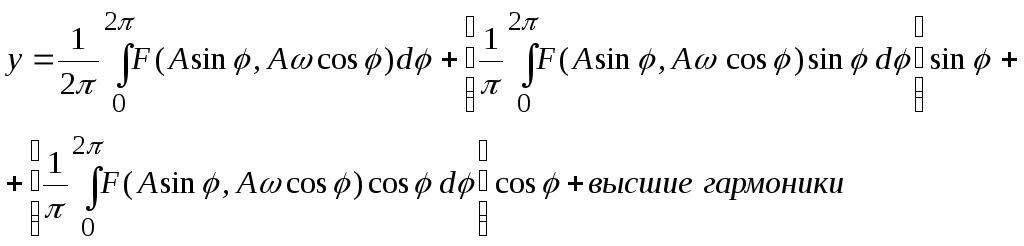
С учётом изложенного, нелинейное уравнение (4.1.1) с точность до высших гармоник заменяется приближенным линейным уравнением (гармонически линеаризованным):
![]() - уравнение гармонической
линеаризации, (4.1.8)
- уравнение гармонической
линеаризации, (4.1.8)
где
![]() и
и ![]() - коэффициенты гармонической линеаризации.
- коэффициенты гармонической линеаризации.
(4.1.9)
(4.1.10)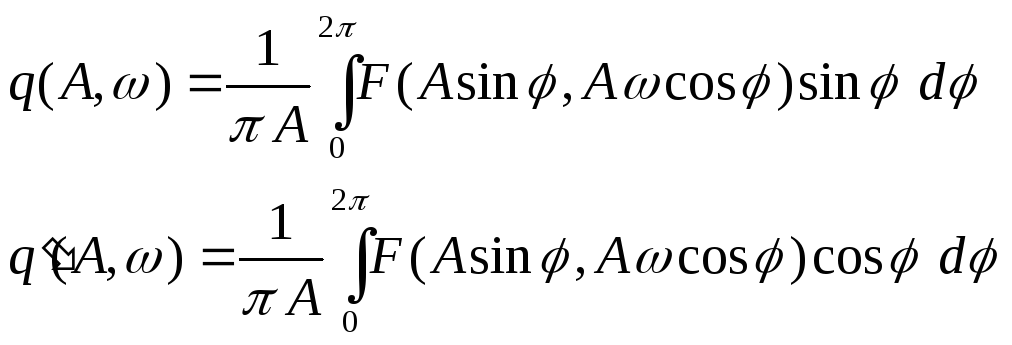
Если амплитуда и
частота колебаний постоянны, то эти
коэффициенты постоянны. В переходных
колебательных режимах с изменением А
и ω коэффициенты ![]() и
и ![]() также изменят свои значения, что
существенно отличает метод гармонической
линеаризации от метода малых отклонений.
также изменят свои значения, что
существенно отличает метод гармонической
линеаризации от метода малых отклонений.
Если
в выражении (4.1.8)) заменить![]() ,
тогда
,
тогда
 (4.1.11)
(4.1.11)
Тогда уравнениегармонической линеаризациипринимает вид
![]() (4.1.12)
(4.1.12)
Формулы гармонической линеаризации для более простых нелинейностей типа
![]() ,будут иметь видпри x
= Asinωt:
,будут иметь видпри x
= Asinωt:![]() .(4.1.13)
.(4.1.13)
![]() .(4.1.14)
.(4.1.14)
![]() .(4.1.15)
.(4.1.15)
![]() (4.1.16)
(4.1.16)
r(A) – модуль ПФ, показывает во сколько амплитуда первой гармоники на выходе Н.Э. отличается от амплитуды входного сигнала.
![]() (4.1.17)
(4.1.17)
μ(A) – аргумент ПФ, определяет фазовый сдвиг между первой гармоникой на выходе Н.Э. и входным сигналом.
Если амплитуда и частота колебаний постоянны, то эти коэффициенты постоянны, а в переходном колебательном режиме с изменением амплитуды А и частоты ω коэффициенты также изменяются.
Подобно годографам АФХ W(jω) линейной части, годограф J(A) нелинейного элемента отображается на комплексную плоскость.
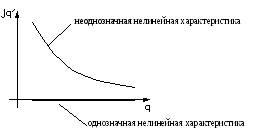
Рис. 4.1.4
Для неоднозначных
нелинейных характеристик годограф
J(A)
имеет вид некоторой кривой (рис.4.1.4) в
системе координат ![]() .В случае однозначных
характеристик годограф J(A)
обращается в отрезок прямой линии ,
лежащий на вещественной оси .
.В случае однозначных
характеристик годограф J(A)
обращается в отрезок прямой линии ,
лежащий на вещественной оси .
Вычисление коэффициентов гармонической линеаризации
Р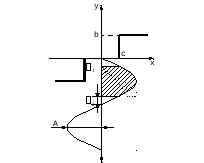 ассмотрим
идеальное 3-х позиционное звено.
ассмотрим
идеальное 3-х позиционное звено.
Нечетно-симметричные характеристики можно интегрировать на интервале 0<φ<π.
2 φ=ωt
Рис. 4.2.1 Рис. 4.2.1 Рис. 39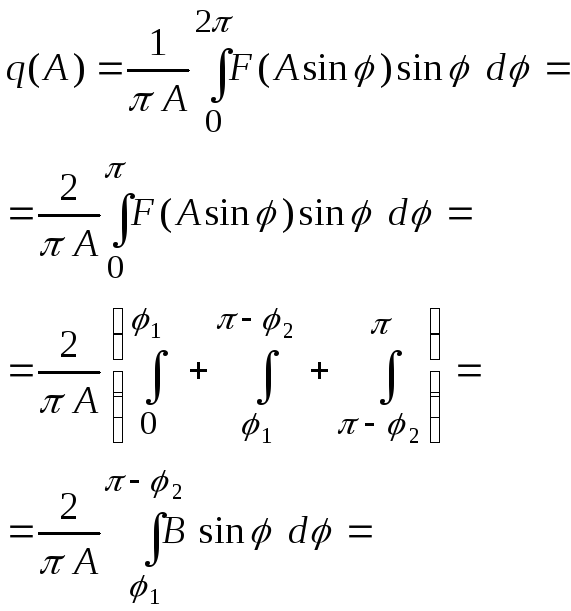
 (4.2.2)
(4.2.2)
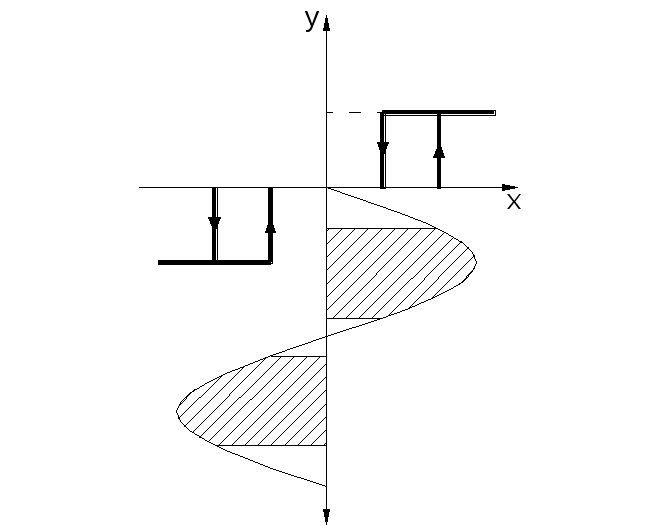
Рассмотрим реальное 3-х позиционное реле.
1
2
![]()
2 φ=ωt b mc c (4.2.3)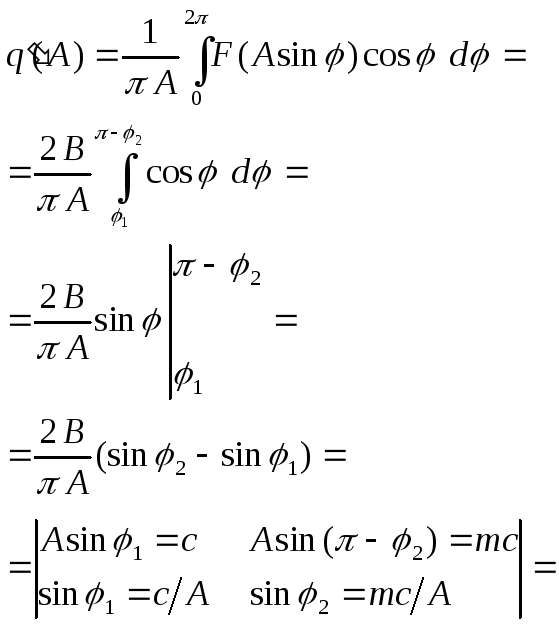






![]()
Если m=1 характеристика идеальна; q’(A)=0
Для всех однозначных (беcпетлевых) нелинейностей q’(A)=0, а эквивалентная передаточная функция J(A)=q(A).
Рассмотрим вычисление q(A) для прямой линии: F(x)=kx
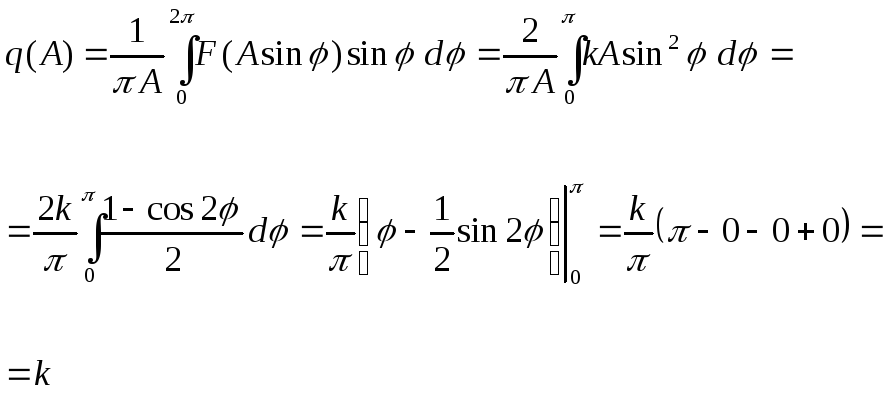
Т.е. гармоническая линеаризация линейной функции дает коэффициент k.