

4.7.2 Определение периодических режимов при несимметричных колебаниях
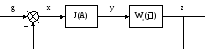
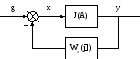
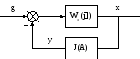
Рассмотрим нелинейную систему
Н.Э.
Л.Ч. g x y z -






Рис. 4.7.6
Связь между координатами на входе и выходе линейной части
![]() (4.7.12)
(4.7.12)
![]() (4.7.13)
(4.7.13)
Учитывая выражение (4.7.3) гармонической линеаризации нелинейного элемента и исключая промежуточные переменные, получим гармонически линеаризованное уравнение системы при несимметричных режимах
 ;
(4.7.14)
;
(4.7.14)
![]() –коэффициент
передачи линейной части,
–коэффициент
передачи линейной части,
![]() –статический
коэффициент передачи нелинейного
элемента,
–статический
коэффициент передачи нелинейного
элемента,
Предположим, что на заданном интервале времени А, ω и x0 остаются постоянными, при этом уравнение (4.7.14) разбивается на два:
уравнение для постоянной составляющей
 ,
(4.7.15)
,
(4.7.15)
уравнение для периодических составляющих
![]() .
(4.7.16)
.
(4.7.16)
Система уравнений (4.7.15, 4.7.16) может быть решена алгебраическим путем. Для этого во втором уравнении системы выделяется действительная и мнимая части, их почленно приравнивают к нулю.
![]() (4.7.17)
(4.7.17)
В итоге получаем систему из трёх уравнений (4.7.16), (4.7.17) и три неизвестных: А, ω, x0. Эта система совместная ,следовательно, могут быть найдены переменные А, ω, x0 .
А
(4.7.18)
(4.7.19)

Затем графически решается уравнение
![]() .
.
Строится годограф АФХ линейной части и обратный годограф АФХ Н.Э. Откуда находятся A и автоколебаний.
В качестве примера рассмотрим методику исследования несимметричных периодических режимов при постоянном входном воздействии.
Предположим, что g(jω)=g0 – постоянная величина, и рассмотрим методику определения несимметричных автоколебательных режимов частотным методом.
Рассмотрим более простой случай, когда нелинейность имеет вид у=F(x), при этом коэффициенты гармонической линеаризации зависят от амплитуды А, смещения x0 на выходе Н.Э. и имеют вид q(А,х0), q'(А,х0) и F0(А, x0).
Записываются уравнения для постоянных составляющих
![]() ;
;
![]() - статический коэффициент передачи
линейной части, при =0.
- статический коэффициент передачи
линейной части, при =0.
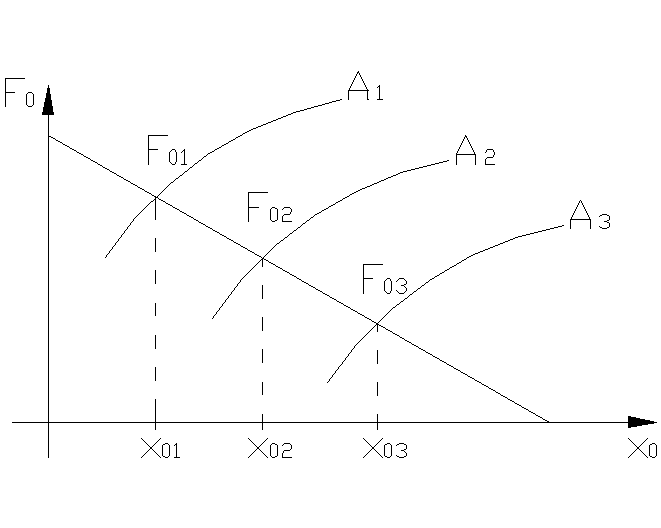
С
А1>A2>A3
троится прямая линия
![]()
П
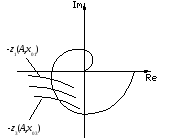
Рис. 4.7.7
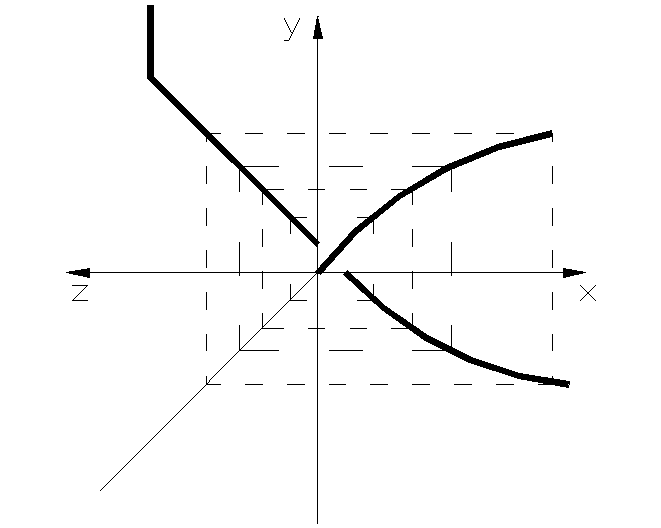
о известным выражениям (4.7.6) гармонической линеаризации для ряда фиксированных значений
амплитуды и переменной
для ряда фиксированных значений
амплитуды и переменной  строится (рис.4.7.7) семей-ство характеристик
строится (рис.4.7.7) семей-ство характеристик
 .
.
4. Строим годограф АФХ W(jω) линейной части.
З
X01 X02 X03![]()
![]() и
определяем устойчивость автоколебаний.
и
определяем устойчивость автоколебаний.
В
W(jω) Х01<X02<X03
Рис. 4.7.8
5
Рис. 66![]() с прямой
с прямой ![]() строим (рис.4.7.9) график A(х0).
строим (рис.4.7.9) график A(х0).
6. По точкам пересечения годографа АФХ линейной части с обратной АФХ нелинейного элемента строим (рис.4.7.9) кривую х0(А).

X01
X03 X02
A3A2
A1
Рис. 4.7.9
7
Рис. 4.7.9
Г
Для исследования устойчивости автоколебательных режимов многоконтурные нелинейные системы с помощью структурных преобразований необходимо приводить к одноконтурным, одного из следующих видов:
![]() . (5.1
а)
. (5.1
а)
Рис. 5.1
а Рис. 5.1
б Рис. 5.1
в
![]() .(5.1
б)
.(5.1
б)
![]() .(5.1
в)
.(5.1
в)
Все структуры позволяют найти характеристическое уравнение :
![]() ,
(5.1.д)
,
(5.1.д)
поэтому определение параметров и устойчивости автоколебаний можно проводить по любой из выше представленных структур.
Из этого рассмотрения видно, что первым этапом анализа устойчивости нелинейных САУ является выполнение структурных преобразований, а вторым этапом составление уравнения (5.1.д).
Структурные преобразования нелинейных систем можно производить линейным и нелинейным способом. Преобразования в нелинейных системах отличаются от преобразований в линейных САУ, т.к. амплитуда сигнала на входе НЭ должна оставаться неизменной независимо от выполняемых преобразований, поэтому линейные звенья нельзя переносить через нелинейный элемент. Линейные преобразования выполняются по известным правилам и являются эквивалентными, т.е. передаточная функция замкнутой системы до преобразования равна передаточной функции замкнутой системы после преобразования. После нелинейных преобразований с исходным совпадает только характеристическое уравнение (5.1.д).
Рассмотрим несколько примеров с линейными и нелинейными преобразованиями структурных схем.
Пример 1. Нелинейность в прямом пути внутреннего контура .


Рис. 5.2
Запишем
по формуле Мэзона ПФ замкнутой
гармонически линеаризованной нелинейной
САУ ![]() .
(5.2)
.
(5.2)
Проведём линейные преобразования структурной схемы
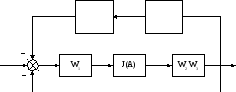
Рис. 5.3
Просуммируем обратные связи. Ввести переменные g, z
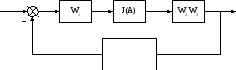
Рис.
5.4
В окончательном виде:
Ввести переменные g, z
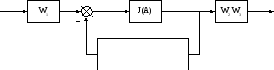
Рис. 5.5
Для проверки запишем ПФ замкнутой нелинейной САУ
 (5.3)
(5.3)
Из совпадения выражений (5.3) и (5.2) делаем вывод, что преобразования выполнены верно.
Пример2. Преобразование структурной схемы нелинейным способом
Нелинейные преобразования основаны на отключении одной из линий связи и вынесении нелинейностей из внутреннего контура. Такие преобразования не являются эквивалентными. Они позволяют получить то же самое характеристическое уравнение, но не передаточную функцию замкнутой системы.
Разрываем схему и выносим нелинейность из внутреннего контура.


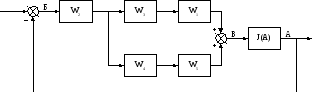
Рис. 5.6
Характеристический полином замкнутой системы
![]() , (5.4)
, (5.4)
совпадает по виду со знаменателем исходной передаточной функции (5.2), но числитель ПФ будет отличаться от числителя (5.2.). Следовательно, преобразованная структурная схема не позволяет построить эквивалентные переходные процессы.
Пример 2 . Нелинейность в цепи местной обратной связи

Рис. 5.7
Разомкнём линию связи за нелинейностью и извлечём НЭ из внутреннего контура
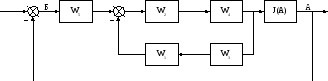
Рис. 5.8

Рис. 5.9
Место разрыва устранено соединением точек А и Б линией связи.
Найдём характеристическое уравнение структуры (рис. 5.9)
![]() (5.5)
(5.5)
![]() (5.6)
(5.6)
По исходной структурной схеме (рис.5.7) получим ПФ замкнутой системы
![]() .(5.7)
.(5.7)
Как видно, знаменатель выражения (5.7) является совпадает с характеристическим уравнением (5.6).
Если в структурных схемах встречаются две нелинейности, расположенные рядом (рис.5.10), то они объединяются в одну эквивалентную нелинейную характеристику (рис.5.11). Затем преобразование структурных схем проводят веше рассмотренными способами.
y z
x
Н.Э.1
Н.Э.2



Рис. 5.10 Рис. 5.11
Г