

Глава 2. Фазовая плоскость систем, описываемых уравнениями с неаналитической правой частью
В дифференциальных уравнениях с неаналитической правой частью, последняя не раскладывается в ряды по степеням аргументов (х,у).
2 .1. Исследование системы со скользящим режимом
Рассмотрим систему, которая содержит объект с самовыравниванием, безынерционный чувствительный элемент, усилитель мощности (золотник) и серводвигатель постоянной скорости.

-
Рис. 2.1.1
- регулируемая переменная
- выходная величина чувствительного элемента
- выходная величина У.М.
- регулирующее воздействие
В
общем случае объект управления с
самовыравниванием описывается уравнением:
![]()
Где:
![]() - постоянная
времени,
- постоянная
времени,
![]() - коэффициент
самовыравнивания,
- коэффициент
самовыравнивания,
- если >0 – объект статически устойчив, и задачей регулятора является обеспечение требуемого качества управления;
-если <0 – объект статически неустойчив,
-если =0 – объект нейтрален.
В двух последних случаях задачами регулятора являются: во-первых, обеспечение устойчивости, во-вторых, обеспечение требуемого качества управления.
Рассмотрим случай нейтрального объекта т.е. =0, тогда:
![]() .(2.1.1)
.(2.1.1)
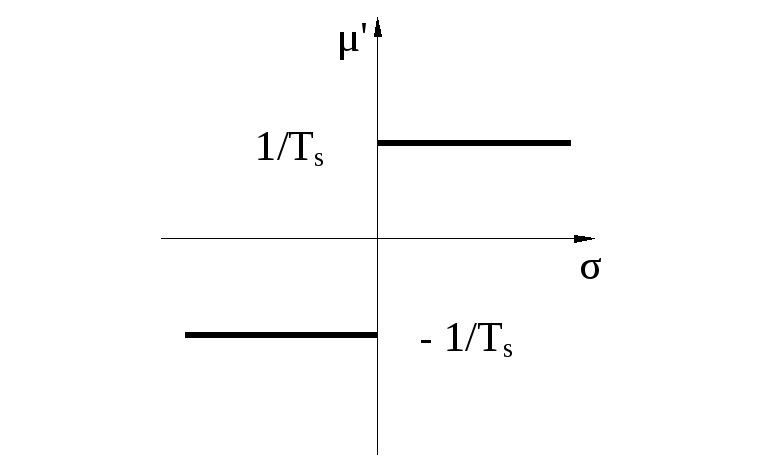
Уравнение
серводвигателя постоянной скорости
 (2.1.2)
(2.1.2)
Уравнение
золотника с жесткой обратной связью
![]() (2.1.3)
(2.1.3)
γ – коэффициент жесткой обратной связи
Уравнение безынерционного чувствительного элемента (ЧЭ)
![]() (2.1.4)
(2.1.4)
- коэффициент, характеризующий чувствительность ЧЭ
Исключим промежуточные переменные μ, σ, η
Для этого, продифференцировав уравнение (2.1.1), решим (2.1.1, 2.1.2, 2.1.3, 2.1.4) относительно старшей производной выходной переменной и получим:
 ;
;  ;
(2.1.5)
;
(2.1.5)
Исключим переменную σ:
Таким образом, 
С учетом изложенного
(2.1.6)
![]()
З аменим
переменные
аменим
переменные
![]()
 (2.1.7)
(2.1.7)
Учитывая
что ![]() , (2.1.8)
, (2.1.8)
исключим в (2.17) переменную время t . Для этого разделим выражения (2.1.7) на (2.1.8):
 (2.1.9)
(2.1.9)
Проинтегрируем выражения (2.1.9), получим уравнения интегральных кривых, определяющих траектории на фазовом портрете
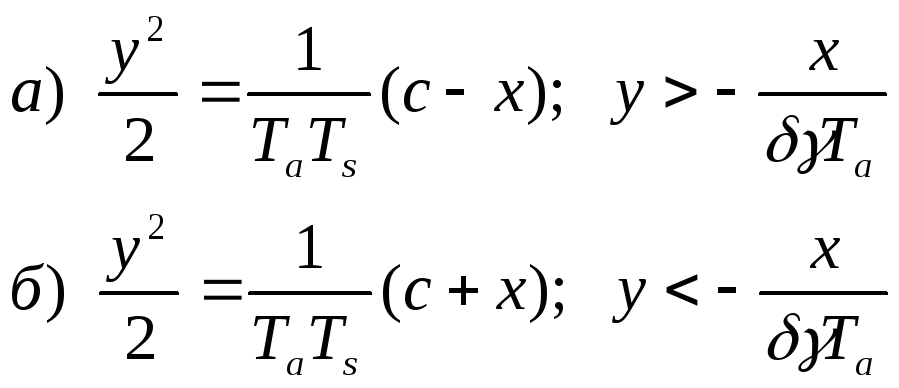 (2.1.10)
(2.1.10)
Уравнение
линии переключения получим, заменяя в
условии ![]() знак неравенства
знаком равенства:
знак неравенства
знаком равенства:
Рис. 2.1.2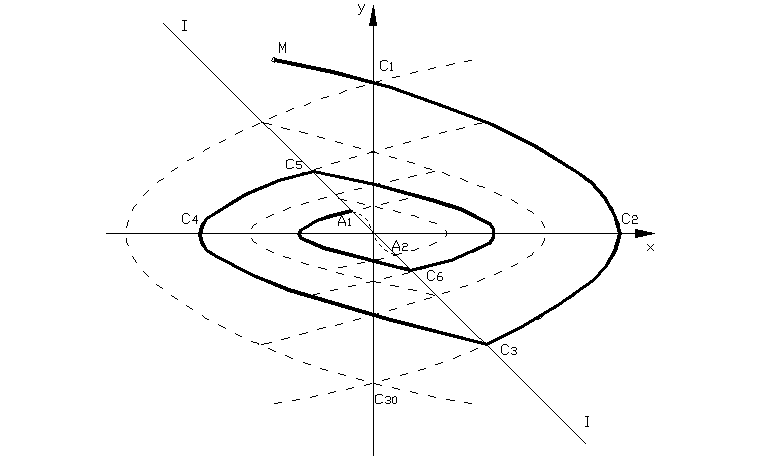
![]()
![]() (2.1.11)
(2.1.11)
Рассмотрим фазовый портрет системы. Область справа от линии переключения I-I заполнена траекториями (параболами) семейства 2.1.10а, а слева – семейства 2.1.10б.
При отсутствии
внутренней жесткой обратной связи линия
переключения совпала бы с осью ординат
и точка М, двигаясь по траектории С1С2С30
семейства 2.1.10а, переходила бы в точке
С30,
на симметричную траекторию С30С1
семейства 2.1.10б. Этой замкнутой траектории
соответствовали бы автоколебания в
системе. Из-за наличия внутренней
обратной связи (![]() ),
переход с параболы семейства 2.1.10а на
параболу семейства 2.1.10б происходит на
линии переключения в точке С3
и, двигаясь по параболе С3С4С5,
а в точке С5
происходит
переход на траекторию семейства 2.1.10а
и т.д. С каждым полуколебанием изображающая
точка приближается к началу координат
– к равновесному состоянию. Это
соответствует о затухающим колебаниям
в системе. Однако, при попадании точки
М на отрезок А1А2,
характер движения становится существенно
иным.
),
переход с параболы семейства 2.1.10а на
параболу семейства 2.1.10б происходит на
линии переключения в точке С3
и, двигаясь по параболе С3С4С5,
а в точке С5
происходит
переход на траекторию семейства 2.1.10а
и т.д. С каждым полуколебанием изображающая
точка приближается к началу координат
– к равновесному состоянию. Это
соответствует о затухающим колебаниям
в системе. Однако, при попадании точки
М на отрезок А1А2,
характер движения становится существенно
иным.
Точки А1 и А2 являются точками пересечения линии переключения I-I с параболами семейства 2.1.10а и 2.1.10б, проходящими через начало координат.
Е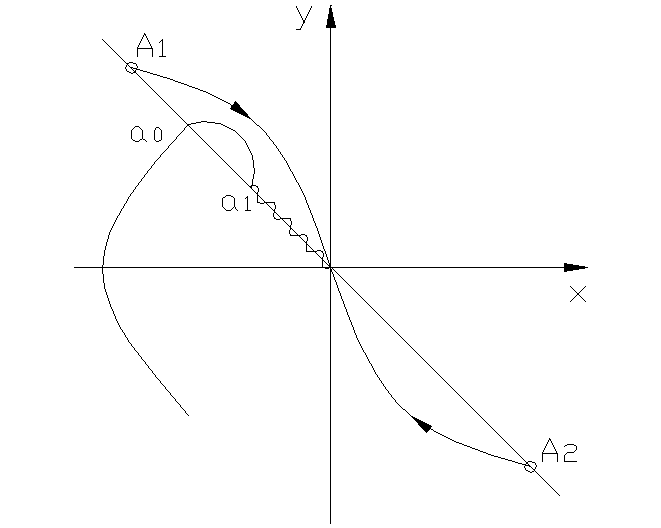 сли
изображающая точка М попадает на особый
отрезок А1А2,
например, в точку а0,
то в дальнейшем изображающая точка
скользит вдоль линии переключения из-за
непрерывного реверсирования серводвигателя.
сли
изображающая точка М попадает на особый
отрезок А1А2,
например, в точку а0,
то в дальнейшем изображающая точка
скользит вдоль линии переключения из-за
непрерывного реверсирования серводвигателя.
Начиная с точки А1, начинается скользящий режим. Скольжение происходит по линии переключения до начала координат.
Рис. 2.1.3
Найдем закон
движения в скользящем процессе. На линии
переключения уравнение движения будет
иметь вид: ![]() .
(2.1.12)
.
(2.1.12)
Рис. 20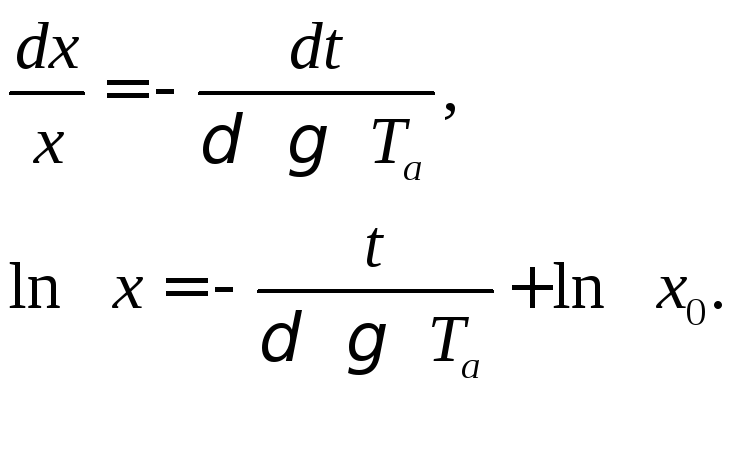
![]() ,
. (2.1.13)
,
. (2.1.13)
– является решением уравнения (2.1.12).
Значения x0 и t отсчитываются с момента попадания точки М на линию скользящего режима.
Особенность скользящего режима заключается в том, что в данном режиме нелинейная колебательная система 2-го порядка вырождается в линейную систему первого порядка. При этом закон движения в скользящем режиме не зависит от параметров прямой цепи системы и определяется только коэффициентом обратной связи.