

4.3. Элементарные деформации. Коэффициент пуассона
Рис.4.4. Растягивание
резинового шнура с постоянной силой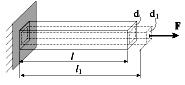
![]() и потянем за другой конец с постоянной
силой. Шнур придет в новое положение
равновесия с длиной
и потянем за другой конец с постоянной
силой. Шнур придет в новое положение
равновесия с длиной
![]() (рис. 4.4). Такую простейшую деформацию
можно охарактеризовать относительным
удлинением
(рис. 4.4). Такую простейшую деформацию
можно охарактеризовать относительным
удлинением
![]() (4.3.1)
(4.3.1)
При этом растяжение
соответствует
![]() ,
а сжатию
,
а сжатию
![]() .
.
Деформацию сдвига можно наблюдать в опыте с резиновым кубиком, если закрепить, например, его нижнее основание, а к верхнему основанию приложить касательную силу. (рис.4.5). Деформация в этом случае будет характеризоваться параметром
![]() ,
(4.3.2)
,
(4.3.2)
зависящим от угла сдвига , который в большинстве практически важных случаев мал, и .
Рис.4.5. Деформация
резинового кубика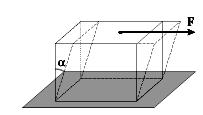
![]() .
(4.3.3)
.
(4.3.3)
Опытным путем
установлено, что отношение
![]() к
к
![]() приблизительно одинаково для разных
деформаций одного и того же материала.
В теории упругости материал характеризуется
коэффициентом Пуассона:
приблизительно одинаково для разных
деформаций одного и того же материала.
В теории упругости материал характеризуется
коэффициентом Пуассона:
![]() .
(4.3.4)
.
(4.3.4)
Каково численное значение коэффициента Пуассона? Чтобы ответить на этот вопрос, посчитаем изменение объема резинового шнура.
В отсутствие
деформации его объем
![]() ,
объем же деформированного шнура
,
объем же деформированного шнура
![]() .
(4.3.5)
.
(4.3.5)
В последнем
выражении мы пренебрегли малыми
величинами второго порядка
![]() .
С учетом (4.3.4) относительное изменение
объема запишется в виде
.
С учетом (4.3.4) относительное изменение
объема запишется в виде
![]() (4.3.6)
(4.3.6)
Рис.4.6. Деформация
кубика в точке Р
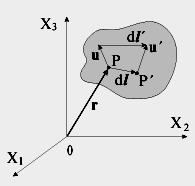
Рис.4.7. К понятию
тензора деформации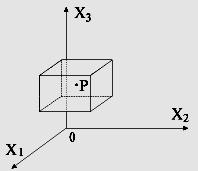
![]() .
Для изотропных материалов, имеющих
одинаковые механические свойства по
всем направлениям, коэффициент Пуассона
.
Для изотропных материалов, имеющих
одинаковые механические свойства по
всем направлениям, коэффициент Пуассона
![]() ,
в частности, для металлов
= 3/10.
,
в частности, для металлов
= 3/10.
Понятие о тензоре деформации. В рассмотренных выше случаях мы имели дело с одномерными однородными деформациями растяжения и сдвига (вдоль одного направления), где и оказывались одними и теми же для всех элементарных объемов резинового шнура. Во многих случаях ситуация гораздо сложнее: с одной стороны, деформации меняются от точки к точке (неоднородные деформации), а с другой стороны, не являются одномерными. Последнее означает, что деформации в некоторой точке P описываются тремя деформациями растяжения 11,22,33 маленького кубика с т. P внутри (рис. 4.6) и двумя сдвигами каждой из трех граней кубика: 12,13;21,23;31,32. Здесь первый индекс i означает, что грань кубика перпендикулярна оси Xi, второй индекс j означает, что грань смещается вдоль оси Xj. Таким образом, неоднородные деформации в каждой точке тела в общем случае характеризуются набором 9 величин деформаций, являющихся функциями координат. Эти девять величин составляют тензор деформаций, но независимы лишь 6 его величин. Рассмотрим несколько подробнее подход, используемый для описания деформации в некоторой точке P, приводящий к введению понятия тензор деформаций. Пусть тело находится в недеформированном состоянии, и известно положение каждой из его частиц, задаваемых радиус-вектором r относительно некоторой системы координат как, например, положение т.P на рис 4.7. При деформировании все его точки, вообще говоря, смещаются. Смещение каждой точки можно охарактеризовать вектором смещения u(x1, x2, x3), являющегося при неоднородных деформациях функцией координат. Деформации в точке будут определены лишь тогда, когда будет известно смещение соседних с т. P частиц тела. Таким образом, задание смещения всех частиц тела полностью определяет его деформацию.
В самом деле,
рассмотрим две бесконечно близкие точки
P(x1,x2,x3)
и P'(x1+dx1,x2+
dx2,x3+dx3),
имеющие смещения u(x1,x2,x3)
и u'=u(x1+dx1,x2+dx2,x3+dx3).
Из рисунка нетрудно видеть, что если
взаимное расположение точек в
недеформированном состоянии задавалось
радиус-вектором
![]() проекции, то в результате деформаций
новое взаимное расположение задается
вектором
проекции, то в результате деформаций
новое взаимное расположение задается
вектором
![]() (4.3.7)
(4.3.7)
В частности, если u'=u, то деформации в т. P отсутствуют.
Для удобства
описания деформаций возведем (4.3.7) в
квадрат и будем оперировать модулями
векторов
![]() .Тогда
.Тогда
![]() . (4.3.8)
. (4.3.8)
В равенстве (4.3.8) пренебрежем последним членом в правой части, поскольку снижаем деформации малыми (du dℓ), а проекции вектора du представим в виде сумм
![]() (4.3.9)
(4.3.9)
Выражение (4.3.9) описывает приращение каждой из трех проекций вектора смещения при переходе из т. P в т. P' и содержит три слагаемых, каждое из которых есть произведение производной функции ui в т. P на приращение соответствующего аргумента dxj.
Расписывая в (4.3.8) скалярное произведение в виде
![]()
и подставляя (4.3.9) в (4.3.8), получим
![]() (4.3.10)
(4.3.10)
где, по определению
![]() тензор деформаций.
(4.3.11)
тензор деформаций.
(4.3.11)
Из его определения видно, что он является симметричным тензором (Uij= Uji). Для описания деформаций в каждой т. Р можно выбрать такую систему координат, в которой только три диагональные компоненты тензора U11,U22 и U33 отличны от нуля. Как и в случае приведения тензора инерции к главным осям, уместно напомнить, что для каждой точки тела Р существуют свои три главные оси, относительно которых формула (4.3.10) имеет наиболее простой вид:

(4.3.12)
В качестве примера
рассмотрим деформацию сдвига в резиновом
кубе, изображенном на рис. 4.5. Для удобства
нанесем на его боковую грань прямоугольную
сетку, разбивающую эту грань на маленькие
квадратики со сторонами, параллельными
ее диагоналям (рис.4.8,а). При деформации
квадратики превращаются в прямоугольники
(рис.4.8,б). Если под
![]() и
и
![]() понимать длины диагоналей элементарных
квадратика и прямоугольника соответственно,
то эти длины можно связать формулой
(4.3.12) только в системе координат, оси
которой X1
и Х2
направлены вдоль ребер элементарных
ячеек (ось Х3
перпендикулярна плоскости чертежа).
понимать длины диагоналей элементарных
квадратика и прямоугольника соответственно,
то эти длины можно связать формулой
(4.3.12) только в системе координат, оси
которой X1
и Х2
направлены вдоль ребер элементарных
ячеек (ось Х3
перпендикулярна плоскости чертежа).
|
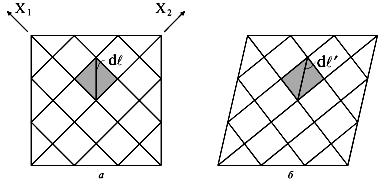
Рис.4.8. Деформации в резиновом кубе
Обобщая полученный результат, следует сказать, что при произвольных деформациях главные оси в любой точке Р должны быть направлены параллельно ребрам элементарного прямоугольногопараллелепипеда, который при деформации остается прямоугольным параллелепипедом. Деформации сдвига относительно главных осей координат отсутствуют. Ниже мы установим связь между деформациями сдвига и недиагональными компонентами тензора деформаций. Выясним далее физический смысл диагональных компонент U11, U22 и U33. Относительное удлинение каждой из граней призмы равно соответствующей диагональной компоненте тензора деформаций. В самом деле
![]() . (4.3.13)
. (4.3.13)
Пусть в окрестности т. P(x1,x2,x3) деформации таковы, что кубик со сторонами dx1, dx2 и dx3 превращается в параллелепипед. Для наглядности рассмотрим картину деформации в плоскости X1 X2. Смещения вершин квадрата при деформации изображены соответствующими векторами. Длины прямоугольника в направлении главных осей X1 и X2 изменились до величин
 (4.3.14)
(4.3.14)
Из (4.3.14) легко вычисляются относительные удлинения:
 (4.3.15)
(4.3.15)
С использованием соотношения (4.3.13) легко также связать изменение элементарного объема с диагональными компонентами тензора. Объем элементарного параллелепипеда
![]() (4.3.16)
(4.3.16)
и также изменяется
при деформациях. Относительное изменение
этого объема при малых деформациях![]() ,
как следует из (1.5.16), равно
,
как следует из (1.5.16), равно
![]() (4.3.17)
(4.3.17)
Важно отметить, что при сдвиге объем тела не меняется. Поэтому при деформациях сдвига сумма диагональных компонент тензора деформаций (иногда употребляют термин "след тензора"), приведенного к главным осям, равна нулю (см. ниже).
Рис.4.9. «След
тензора»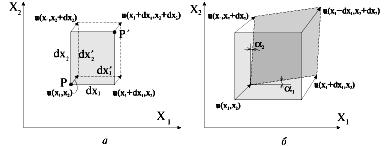
5.1.УПРУГИЕ ТЕЛА
Как уже отмечалось выше, при деформациях возникают внутренние напряжения, силы которых, в общем случае, зависят не только от деформаций, но и от скоростей, с которыми эти деформации происходят. В этом легко убедиться, если взять полимерное вещество, которое при обычных условиях медленно растекается подобно замазке, принимая форму сосуда, в котором оно находится. Можно без особых усилий изменить его форму, если делать это медленно. Если вылепить шарик, то легко обнаружить, что такой шарик обладает хорошими упругими свойствами, подскакивая практически после удара об пол на ту же высоту, с которой он был брошен без начальной скорости. Этот опыт показывает, что силы деформации, подобно силам вязкого трения, возрастают по мере увеличения скорости деформации. В ряде практически важных случаев силы напряжения определяются только деформациями. Такие тела, в которых это имеет место, называются абсолютно упругими телами, или упругими телами. Замечательным свойством таких тел является способность полностью восстанавливать свою форму после снятия внешних усилий, прикладываемых к телу. Рассмотрим, например, растяжение (или сжатие) стержня (рис. 4.4) с силой F, приложенной перпендикулярно к торцевой грани с площадью сечения S. Опыт показывает, что при последовательном возрастании нагрузки вначале деформации развиваются равномерно по длине стержня и растут пропорционально нагрузке, т.е.
![]() .
(5.1.1)
.
(5.1.1)
Величина
![]() называется нормальным напряжением в
торцевом сечении стержня. Пропорциональность
деформаций
соответствующим напряжениям выражает
закон Гука. Коэффициент пропорциональности
называется коэффициентом удлинения и
для каждого материала определяется
опытным путем. Так как численные значения
гораздо меньше ,
то
весьма малая величина. Поэтому обычно
вводят модуль упругости (модуль Юнга)
Е = -1,
и закон Гука окончательно записывают
в виде
называется нормальным напряжением в
торцевом сечении стержня. Пропорциональность
деформаций
соответствующим напряжениям выражает
закон Гука. Коэффициент пропорциональности
называется коэффициентом удлинения и
для каждого материала определяется
опытным путем. Так как численные значения
гораздо меньше ,
то
весьма малая величина. Поэтому обычно
вводят модуль упругости (модуль Юнга)
Е = -1,
и закон Гука окончательно записывают
в виде
Рис.5.1. Диаграмма
растяжения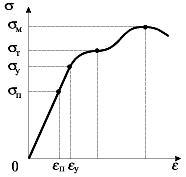
![]() .
(5.1.2)
.
(5.1.2)
Опыт показывает,
что этот закон выполняется лишь в
определенном интервале напряжений.
Если растягивать стержень, последовательно
увеличивая от нуля возрастающую силу,
то каждый раз, после снятия нагрузки,
деформация исчезает. При некотором
напряжении
у
появляется
заметное остаточное удлинение. Это
напряжение y
называется пределом упругости. На
(рис.5.1) изображена зависимость деформаций
от напряжений, называемая диаграммой
растяжений. Следует отметить, что закон
Гука выполняется только в части области
упругости
области пропорциональности, когда
![]() .
.
Рис.5.2. Образование
шейки
То напряжение, которое данный материал может выдержать на практике, не разрушаясь и не получая опасной деформации, называют допустимым и обозначают . Обычно п, и все расчеты проводят на основе законов Гука. Чтобы обеспечить прочность при всех обстоятельствах допустимое напряжение выбирается как часть предела прочности, в частности, для металлов 0.2м, а для дерева 0.1м. Следует отметить, что наибольшие деформации, которые может выдержать материал, не определяются протяженностью области текучести. Если область текучести велика, то материал называется пластичным. Такой материал, как например сталь, способен выдерживать большие нагрузки без разрушения. Наоборот, если область текучести невелика, то этот материал хрупок. Хрупкие материалы, как чугун например, разрушаются при деформациях п. В ряде случаев пластичные материалы могут разрушаться и при малых деформациях п (например, сталь при температуре ниже 45С). Аналогичными свойствами обладают и сдвиговые деформации. В частности, в области пропорциональности связь между деформациями сдвига и касательным напряжением (рис.4.9) задается соотношением
![]() ,
(5.1.3)
,
(5.1.3)
в котором
![]()
касательное напряжение, аналогичное
по смыслу введенному выше нормальному
напряжению, а G
модуль сдвига, являющийся, как и модуль
Юнга, также характеристикой материала.
касательное напряжение, аналогичное
по смыслу введенному выше нормальному
напряжению, а G
модуль сдвига, являющийся, как и модуль
Юнга, также характеристикой материала.
Таблица 5.1
Характеристики упругости и прочности некоторых материалов
Материал |
Модуль упругости E |
Модуль сдвига G |
Предел пропорциональности П |
Предел текучести Т |
Предел прочности при растяжении М |
Сварочная сталь |
2000 |
770 |
1,3...1,6 |
1,8...2,6 |
3,3...4,0 |
Пружинная сталь незакаленная |
2200 |
850 |
5,0 и выше |
- |
до 10 и выше |
Пружинная сталь закаленная |
2200 |
850 |
8,5 и выше |
- |
до 17 |
Медь |
1100...1300 |
415...440 |
- |
0,7 |
22 |
Серый чугун |
750...1050 |
290...400 |
- |
- |
1,2...2,4 |
Свинец |
140...180 |
55...80 |
- |
0,05 |
0,14...0,18 |
Из этой таблицы можно сделать два важных вывода.
Во-первых, поскольку предел пропорциональности п на 2 3 порядка меньше модуля упругости, то в области упругости деформации у 10-3 10-2.
Во-вторых,
просматривается связь между величиной
модуля Юнга E и модуля сдвига G
чем больше E, тем больше и G. Это не
случайно, т.к. между обеими величинами
существует жесткая
связь. Чтобы
ее установить, рассмотрим растяжение
маленького кубика с длиной стороны
![]() ,
как это было изображено на рис. 5.3.
,
как это было изображено на рис. 5.3.
Рис.5.3. Растяжение
кубика (связь между модулем Юнга и
модулем сдвига)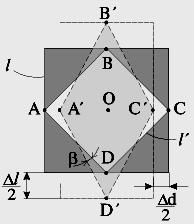
Величину угла
сдвига
можно легко связать с деформацией
удлинения
![]() и коэффициентом Пуассона
и коэффициентом Пуассона
![]() .
Из треугольника A'OD' следует, что
.
Из треугольника A'OD' следует, что
 . (5.1.4)
. (5.1.4)
Поскольку 1, то
 . (5.1.5)
. (5.1.5)
Приравнивая правые части (5.1.4) и (5.1.5), находим
![]() . (5.1.6)
. (5.1.6)