

40. Імпульсний датчик швидкості
Принцип роботи імпульсного датчика швидкості пояснюється рис. 3.74, де прийняті позначення: ВУ - обчислювальний пристрій; ИС - джерело світла (світлодіодні випромінювачі); ПС - приймач світла.
Джерела світла мають невидимий спектр випромінювання. Кількість отворів на диску 600, 3000, 6000.
Для одержання інформації про напрямок обертання на диску роблять ще ряд перфорацій, зсунутих у просторі на 900, і по їх фазі визначають напрямок обертання. Тоді потрібно мати друге джерело і відповідно приймач світла (див. рисунок 3.75).


Рисунок 3.74 Рисунок 3.75
41. Фотоімпульсний датчик переміщення
Фотоелектричний імпульсний датчик положення складається з лінійки з нанесеними на неї прозорими штрихами та движка. На движку прозорі штрихи нанесені з нахилом і при його переміщенні уздовж лінійки на кожний крок в в елементах зчитування ЕЗ виробляється імпульс. ЕЗ мають зсув на 1/4 полюсного поділку в просторі відносно один одного. Зсув по фазі сигналів ЕЗ використовується для визначення переміщення.

T – тригер;
Д1, Д2 - диференціатори;
I1, I2 – елементи І;
СТ2 – реверсивний лічильник.

На валу двигуна жорстко монтується фотоімпульсний датчик (ФІД) положення. На виході ФІД знаходиться послідовність імпульсів, частота який пропорційна швидкості обертання двигуна. Для визначення положення при додатній швидкості обертання імпульси необхідно сумувати; а при від’ємній – віднімати. Цю функцію виконує реверсивний лічильник імпульсів (РПІ).
При
активному сигналі „+” ( )
з приходом кожного імпульсу на вхід РЛІ
код на його виході збільшується на 1.При
активному сигналі „-” (
)
з приходом кожного імпульсу на вхід РЛІ
код на його виході збільшується на 1.При
активному сигналі „-” ( )
– зменшується на 1.
)
– зменшується на 1.
При
великій кількості імпульсів на оберт
двигуна РЛІ
швидко заповнюватиметься, тому на виході
ФІД
ставлять дільник імпульсів. Він зменшує
частоту імпульсів в
 раз. Це знижує точність вимірювання
положення, але дозволяє зменшити
розрядність РЛІ.
Двійковий код з виходу РЛІ,
пропорційний куту повороту вала,
подається в ЦАП.
раз. Це знижує точність вимірювання
положення, але дозволяє зменшити
розрядність РЛІ.
Двійковий код з виходу РЛІ,
пропорційний куту повороту вала,
подається в ЦАП.
Напруга Uω з вихода ЦАП пропорційна положенню двигуна, а її полярність визначається полярністю опорної напруги Uоп.
Більш проста схемна реалізація можлива при використанні ФІД з двома вихідними послідовностями імпульсів – косинусною і синусною. Частота обох послідовностей пропорційна швидкості обертання, а напрямок обертання визначається тим, яка з послідовностей випереджає іншу.
Дільник імпульсів і РЛІ можна реалізувати за допомогою мікроконтролерів. Для цього в мікроконтролерах існують спеціалізовані таймери на вхід яких можна подавати сигнали ФІД (encoder) і, використовуючи функцію Capture, визначити частоту імпульсів.
Система керування швидкістю як правило, будується за принципом підпорядкованого регулювання координат.
42. Формування перехідних процесів пуску - гальмування електропривода. Задатчики інтенсивності, параболічний регулятор положення.
Гальмування противмиканням у статичному режимі можна отримати, якщо механізм створює активний статичний момент, наприклад, сила тяжіння у підйомному механізмі
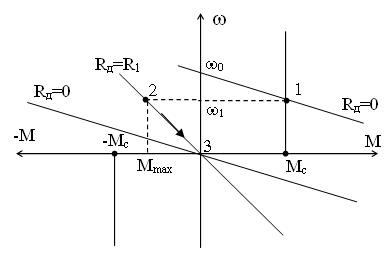
При реактивному статичному моменті Мс до початку гальмування двигун працює в робочій точці 1 із швидкістю w1

Для гальмування механізму здійснюється реверс двигуна з додатковим опором у колі якоря Rд=R1. Так як швидкість змінитися миттєво не може, то двигун переходить у точку 2 на новій штучній характеристиці, яка знаходиться у ІІ гальмівному квадранті, і починає сповільнюватися. На ділянці характеристики 2-3 двигун працює в режимі гальмування противмиканням. Максимальний гальмувальний момент Мmax задається величиною опору Rд, впливаючи на жорсткість характеристики. Якщо при нульовій швидкості двигуна в точці 3 його момент буде менше статичного моменту, то двигун зупиниться. Якщо ж ні, то двигун почне розганятися у зворотному напрямку. В обох випадках у точці 3 двигун потрібно відключити від мережі.
При активному статичному моменті Мс до початку гальмування двигун працює в робочій точці 1 із швидкістю w1. При реверсі двигун із робочої точки 1 переходить у точку 2 на новій штучній характеристиці, так як швидкість змінитися миттєво не може. На ділянці характеристики 2-3 двигун буде сповільнюватися в режимі гальмування противмиканням, прагнучи до нової робочої точки 5. В точці 3 двигун зупиниться і його потрібно відімкнути від мережі, інакше двигун почне розганятися у зворотному напрямку на ділянці 3-4 у рушійному режимі, а на ділянці 4-5 у режимі рекуперативного гальмування.

В режимі гальмування противмиканням двигун споживає електричну енергію від мережі та механічну енергію від механізму.
Для організації режиму динамічного гальмування обмотка якоря відключається від мережі і замикається на додатковий опір Rд,. Обмотка збудження обов’язково повинна залишатися увімкненою у мережу.
При реактивному статичному моменті Мс до початку гальмування двигун працює в робочій точці 1 із швидкістю w1,. Для гальмування механізму здійснюється перемикання обмотки якоря на додатковий опір Rд=R1. Так як швидкість змінитися миттєво не може, то двигун переходить у точку 2 на новій штучній характеристиці, яка знаходиться у ІІ гальмівному квадранті. Двигун сповільнюється в режимі динамічного гальмування на ділянці характеристики 2-3 і обов’язково зупиняється в початку координат. Максимальний гальмувальний момент Мmax задається величиною опору Rд.

При активному статичному моменті Мс до початку гальмування двигун працює в робочій точці 1 із швидкістю w1. При гальмуванні двигун із робочої точки 1 переходить у точку 2 на новій штучній характеристиці, яка визначається величиною додаткового опору Rд=R2. Максимальний гальмувальний момент дорівнює Мmax2. На ділянці характеристики 2-0 двигун буде сповільнюватися, а на ділянці 0-5 розганятися в режимі динамічного гальмування до робочої точки 5, в якій двигун буде працювати в статичному режимі з усталеною швидкістю w5. Якщо увімкнути резистор із меншим опором R1<R2, то максимальний гальмувальний момент буде більше Мmax3>Мmax2, а усталена швидкість менше w4<w5.
В режимі динамічного гальмування механічна енергія, яка поступає від механізму, перетворюється у двигуні та додатковому резисторі в тепло.
Задатчик Інтенсивності.
Без задатчика інтенсивності динамічний струм двигуна, що визначає темп зміни швидкості залежить від величини статичного навантаження і режиму роботи привода (пуск, гальмування).
Пуск: Iдин = Imах – Iс

Гальмування: Iдин = – (Imax + Ic)

Для обмеження темпу зміни швидкості, що потрібно для ряду механізмів, на вході контуру швидкості (див. рисунок 5.37) установлюється задатчик інтенсивності (ЗІ), який задає величину динамічного струму, тому часто його називають задатчиком динамічного струму.

Рисунок 5.37
З метою зниження пере регулювання при видачі завдання на швидкість, обмеження прискорення при розгоні, зменшення динамічних зусиль при пускі застосовують на вході замкнутого контура w встановлюють за датчик інтенсивності.
Розрізняють наступні за датчики інтенсивності:
З лінійною часовою характеристикою


ЗИ 1-го порядка


ЗИ 2-го порядка

