

Тахогенераторы
Тахогенератором называется информационная электрическая машина, предназначенная для выработки электрических сигналов, пропорциональных частоте вращения ротора. Тахогенераторы могут быть постоянного и переменного тока. Тахогенераторы постоянного тока представляют собой маломощные генераторы постоянного тока с независимым возбуждением или с возбуждением от постоянных магнитов. Выходное напряжение тахогенератора пропорционально частоте вращения ротора. Асинхронный тахогенератор по конструктивному исполнению подобен асинхронному двигателю с полым немагнитным ротором. Он состоит из статора и неподвижного сердечника ротора, между которыми, в воздушном зазоре вращается тонкий полый немагнитный цилиндр. Принципиальная схема асинхронного тахогенератора показана на рис. 13.4.
|
|
На статоре генератора размещены две обмотки, пространственно смещенные относительно друг друга на 90o. Одна из них, обмотка возбуждения B, подключена к источнику синусоидального напряжения, другая обмотка, являющаяся генератором Г, включается на измерительный прибор или на измерительную схему. Обмотка возбуждения создает пульсирующий магнитный поток Фв. |
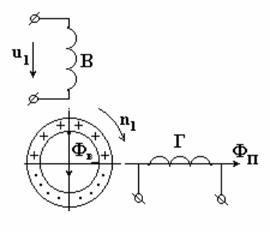 Рис.
13.4
Рис.
13.4При неподвижном роторе ЭДС в генераторной обмотке равна нулю, так как вектор магнитного потока Фв перпендикулярен оси этой обмотки. При вращении цилиндра пульсирующий магнитный поток индуктирует в нем ЭДС вращения. Под действием ЭДС в цилиндре появляются токи, направления которых указаны на рис. 13.4. Токи создают по оси генераторной обмотки пульсирующий поперечный поток Фп. Этот поток индуктирует в генераторной обмотке ЭДС, пропорциональную частоте вращения цилиндра. Асинхронные тахогенераторы, как и тахогенераторы постоянного тока, используются для измерения скорости вращения валов, а также для вырабатывания ускоряющих или замедляющих сигналов в автоматических устройствах.
Шаговые электродвигатели
Шаговым электродвигателем называется вращающийся электродвигатель с дискретными угловыми перемещениями ротора, осуществляемыми за счет импульсов сигнала управления. Шаговые, или импульсные, электродвигатели преобразуют электрические импульсы в фиксированные угловые перемещения - "шаги". Шаговые двигатели находят применение в различных механизмах, рабочие органы которых должны перемещаться дискретно. К таким механизмам относятся киносъемочная и проекционная аппаратура, механизмы подачи различных станков, устройства перемещения валков прокатных станов и др. Шаговые электродвигатели с активным ротором имеют ротор, выполненный из постоянных магнитов (рис. 13.5). Статор имеет выступающие полюсы с сосредоточенной обмоткой в виде катушек на каждом полюсе. Питание статорных катушек производится импульсами напряжения, поступающими с электронного коммутатора.
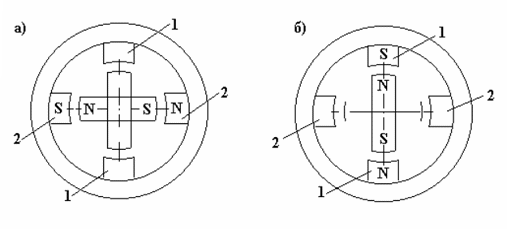 Рис.
13.5
Рис.
13.5
Пусть в начальный момент времени подано напряжение на обмотки полюсов 2 - 2. Образуется статорное магнитное поле с горизонтально расположенными полюсами N - S. В результате взаимодействия этого поля с постоянными магнитами ротора последний займет указанное на рис. 13.5а положение, при котором оси магнитных полей статора и ротора совпадают. Далее, с помощью коммутатора напряжение снято с обмоток 2 - 2 и подано на обмотки полюсов 1 - 1. Образуется магнитное поле статора с вертикально расположенными полюсами. Отключение катушек 2 - 2 и подключение катушек 1 - 1 вызовет скачкообразный поворот магнитного поля статора на 90o. Ротор также повернется на 90oвслед за магнитным полем статора. Ротор шагового двигателя занимает определенное фиксированное положение, соответствующее наибольшей магнитной проводимости относительно возбужденных статорных полюсов. Если отклонить ротор от этого равновесного положения на некоторый угол, то магнитная проводимость для потока уменьшится, силовые линии магнитного поля деформируются, и возникнет синхронизирующий момент, возвращающий ротор в прежнее положение. На статоре шагового реактивного двигателя имеются явно выраженные полюсы с обмоткой возбуждения. Ротор его представляет собой зубчатое колесо без обмотки возбуждения. Катушки статора двигателя получают поочередно импульсы тока, образуя магнитное поле, бегущее определенными скачками по окружности статора. Явнополюсный ротор двигателя синхронно следует за этим полем статора соответствующими дискретными шагами, равными углу αш, где αш- величина шага ротора двигателя.
где 2P - число явных полюсов ротора, равное числу роторных зубцов; m - число обмоток управления на статоре.