

Приведите основные области применения импульсных систем?
Ответ: В радиолокации и в радиотелеуправлении, для управления электрическими двигателями и приводами летательных аппаратов, для стабилизации напряжения в электрических сетях.
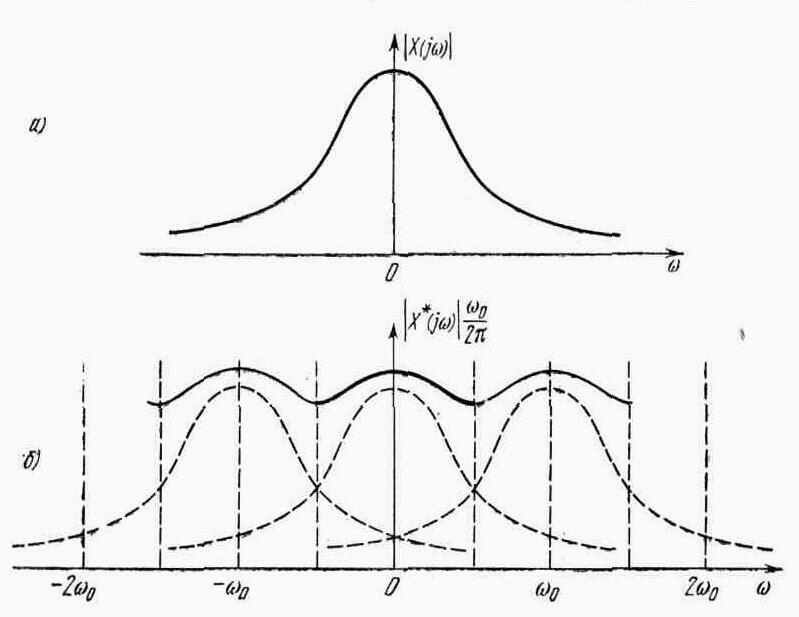
Почему в цифровых системах управления в сравнении с непрерывными происходит некоторая потеря информации?
Ответ: Если
проанализировать частотные свойства
простейшего импульсного элемента, то
спектр x*(j)
выходной
величины x*(t)
простейшего импульсного элемента
периодичен по частоте с “периодом”,
равным частоте квантования. Отсюда
следует, что спектр x*(
j)
полностью
определяется диапазоном частот
(-0
/2
, 0/2![]() )
или в силу симметрии (0,0/2),
т.е. простейший импульсный элемент
осуществляет перенос, транспонирование
частот в основную полосу (-0/2,0/2).
Если спектр X(j)
финитен, то всегда будет происходить
наложение смещенных спектров
Х(j(k0),
т.е. эффект квантования по времени,
осуществляемый простейшим импульсным
элементом, вносит искажение в квантуемый
сигнал.
)
или в силу симметрии (0,0/2),
т.е. простейший импульсный элемент
осуществляет перенос, транспонирование
частот в основную полосу (-0/2,0/2).
Если спектр X(j)
финитен, то всегда будет происходить
наложение смещенных спектров
Х(j(k0),
т.е. эффект квантования по времени,
осуществляемый простейшим импульсным
элементом, вносит искажение в квантуемый
сигнал.
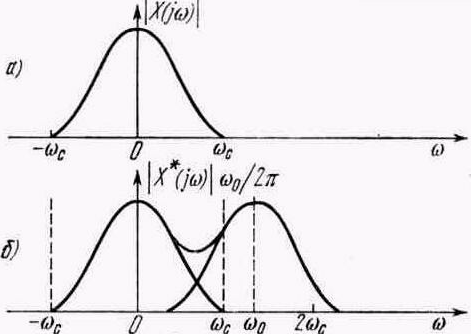
Как будет выглядеть частотная характеристика импульсного фильтра при неограниченном увеличении частоты следования сигнала на выходе импульсного элемента?
Ответ: При увеличении частоты следования сигнала будет происходить наложение смещенных спектров Х(j(k0) и при неограниченном увеличении , вид частотной характеристки будет приближаться к виду прямой.
Приведите примеры применения импульсных систем в радиолокации и в радиотелеуправлении?
Ответ: В радиолокации и в радиотелеуправлении широкое применение получили генераторы импульсов ёмкостного типа, в них вспомогательный управляющий (формирующий) импульс, действуя на сетку лампы, периодически «отпирает» лампу. В результате происходит частичный разряд конденсатора через лампу и сопротивление нагрузки, на котором образуется импульс напряжения, длительностью равный длительности управляющего импульса.
Назовите типовые цифровые законы регулирования в аналогии с линейными непрерывными регуляторами?
Ответ:
П-регулятор
![]() (аналог пропорционального регулятора)
(аналог пропорционального регулятора)
С-регулятор
![]() (аналог
интегрирующего регулятора)
(аналог
интегрирующего регулятора)
Р-регулятор
(разностный регулятор)
![]() (аналог диф. регулятора)
(аналог диф. регулятора)
Какой импульсный элемент с амплитудной модуляцией принято называть экстраполятором (фиксатором) нулевого порядка?
Ответ: Фиксатор
состоит из сумматора, линии задержки
на время
![]() и
интегратора. В фиксаторе во время
действия импульса полезного сигнала
на входе интегратор заряжается до
некоторого уровня, который сохраняется
до прихода очередного импульса. Перед
приходом очередного импульса интегратор
разряжается задержанным на время
отрицательным
импульсом, поступающим через линию
задержки. Если
и
интегратора. В фиксаторе во время
действия импульса полезного сигнала
на входе интегратор заряжается до
некоторого уровня, который сохраняется
до прихода очередного импульса. Перед
приходом очередного импульса интегратор
разряжается задержанным на время
отрицательным
импульсом, поступающим через линию
задержки. Если
![]() и
и
![]() ,
то импульсный элемент называется
экстраполятором
нулевого порядка
,
то импульсный элемент называется
экстраполятором
нулевого порядка
Его передаточная
функция :
![]()
Какие основные типы параметрических моделей используются при описании цифровых систем управления? Как на практике
Как на практике следует выбирать период квантования импульсного элемента с тем, чтобы импульсная система воспроизводила сигнал без искажения, если известна наибольшая постоянная времени непрерывной части системы?
Ответ: период
квантования нужно выбирать таким
образом, чтобы
![]()