

Ответы Билет №1
Какую линейную динамическую систему называют невырожденной?
Дайте определение состояния системы, введенное Р.Калманом?
Минимальный набор переменных, знание которых в каждый момент времени на ряду со знанием внешних воздействий в этот момент времени, позволяет однозначно определить выход системы в этот момент времени.
Дайте определение полностью наблюдаемой линейной системы.
Управляемый объект
(или автоматическая система) называется
полностью наблюдаемым, если все переменные
состояния входят в выражение для
управляемой величины. В общем случае
объект является полностью наблюдаемым,
если матрица Калмана
![]() является невырожденной
является невырожденной
Сформулируйте критерий Михайлова.
Если все корни
характеристического уравнения лежат
в левой полуплоскости, то

Отсюда следует первая формулировка критерия Михайлова.
Система автоматического управления устойчива, если при возрастании частоты от - до + изменение аргумента вектора D(j) будет равно n, где n- порядок характеристического уравнения.
Вектор D(j) можно представить в виде
![]()
Вещественная составляющая этого выражения является четной функцией, а мнимая - нечетной функцией частоты, т.е. U(-)=U(); V(-)= -V() и D(- j)=U() - jV().
Отсюда следует, что кривая Михайлова симметрична относительно вещественной оси и при ее построении можно ограничиться диапазоном частот от 0 до +. Изменение аргумента вектора D(j) при этом уменьшится в два раза и формулировка критерия Михайлова будет следующей.
Система автоматического управления устойчива, если при возрастании частоты от 0 до + вектор D(j) повернется на угол n/2 или, что то же самое, если кривая Михайлова при том же изменении частоты, начиная с положительной вещественной полуоси, обходит последовательно в положительном направлении n квадрантов и заканчивается в n-ом квадранте (рис.3.5).
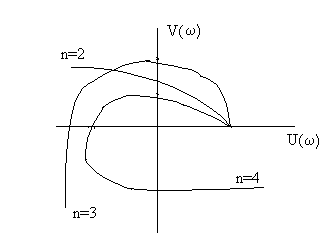
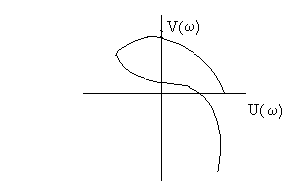
Рис. 3.5. Кривые Михайлова для Рис. 3.6. Кривая Михайлова для
устойчивых САУ неустойчивой САУ
Сформулируйте критерий устойчивости Найквиста?
Формулировка
критерия Найквиста:
для устойчивости замкнутой системы
необходимо и достаточно чтобы амплитудно
- фазовая характеристика устойчивой
разомкнутой системы при изменении
![]() от 0
до
от 0
до
![]() не охватывала точку с координатами {-1,
j0}.
не охватывала точку с координатами {-1,
j0}.

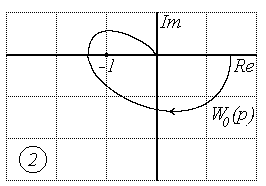
Рис. 4.16. Частотные характеристики, иллюстрирующие критерий Найквиста
1 - устойчивая система; 2 - неустойчивая система
Разомкнутая система может быть неустойчива, но это не означает, что неустойчивой будет и замкнутая. В этом случае меняется формулировка критерия Найквиста: для устойчивости замкнутой системы необходимо и достаточно, чтобы амплитудно - фазовая характеристика неустойчивой разомкнутой системы при изменении от 0 до охватывала точку с координатами {-1, j0} в положительном направлении r/2 раз, где r число корней характеристического уравнения разомкнутой системы с положительной вещественной частью.
Сформулируйте критерий Найквиста для случая, когда разомкнутая система нейтрально устойчива.
Замкнутая система
будет находиться на границе устойчивости,
если на той же частоте, где
![]() ,
фазовая частотная характеристика
разомкнутой системы пересекает ось -
,
фазовая частотная характеристика
разомкнутой системы пересекает ось -![]() .
.
Какие типы границ устойчивости линеаризованных систем можно выделить и чем они характеризуются?
Колебательная – пара сопряженных чисел доминирующие корни.
Апериодическая – вещественный доминирующий корень.
Какие динамические системы называют системами с сосредоточенными параметрами?
С сосредоточенными параметрами - параметры сосредоточены во времени и в пространстве. Для объектов с сосредоточенными параметрами характерно при появлении возмущения одинаковое изменение регулируемого параметра по всему объекту (уровень жидкости по всему сечению резервуара, давление газа в любой точке сосуда).
Поясните, в каких случаях справедлив критерий Зубова?
Что принято называть фазовым портретом?
-Совокупность фазовых траекторий, характеризующая состояния и движения динамической системы.
- графическое изображение системы на фазовой плоскости (или в многомерном пространстве), по координатным осям которого отложены значения величин переменных системы. Поведение переменных Во времени при таком способе представления для каждой начальной точки описывается фазовой траекторией. Совокупность таким фазовых траекторий для любых начальных условий представляет собой фазовый портрет.
Какие системы управления относят к следящим системам?
Следящая система управления — вид системы автоматического управления, в которой заранее неизвестен вид управляющего воздействия. Обычно следящие системы предназначены для воспроизведения на выходе изменения управляющего воздействия, слежения за ним.
Пример следящей системы — радиолокационная станция, в её задачи входит сопровождение цели с заранее неизвестным законом движения.
О динамических свойствах следящей системы можно судить по величине ошибки. Также сигнал ошибки в следящих системах является сигналом, в зависимости от величины которого осуществляется управление объектом.
Следящая система может быть реализована с любым фундаментальным принципом управления и отличается от аналогичной системы программного управления тем, что вместо датчика программы в ней будет размещено устройство слежения за изменениями внешних воздействий.
В следящих системах управляющее воздействие также является величиной переменной, но математическое описание его во времени не может быть установлено, так как источником сигнала служит внешнее явление, закон изменения которого заранее неизвестен.
Так как следящие системы предназначены для воспроизведения на выходе управляющего воздействия с возможно большей точностью, то ошибка, так же как и в случае систем программного регулирования, является той характеристикой, по которой можно судить о динамических свойствах следящей системы. Ошибка в следящих системах, как и в системах программного регулирования, является сигналом, в зависимости от величины которого осуществляется управление исполнительным двигателем.
Что включает в себя отображающая информация о системе управления?
Найдите критический коэффициент передачи одноконтурной САУ с единичной отрицательной обратной связью, содержащей в прямой цепи три устойчивых инерционных звена первого порядка с одинаковыми постоянными времени?
Что понимается под степенью затухания переходного процесса?
Степень затухания переходного процесса - отношение амплитуд двух перерегулирований (последовательных колебаний одного знака). Числителем является амплитуда первого колебания. Степень затухания показывает во всколько раз уменьшается амплитуда второго колебания по сравнению с первым.
Какие недостатки присущи методу сетки при построении области устойчивости?
Значительные затраты машинного времени при сканировании. Сократить затраты модно используя метод для нахождения лишь первой точки, а значит метод вдоль границ
Какие системы автоматического управления относят к классу дискретных?
Система автоматического управления называется дискретной, если выходная величина какого – либо ее элемента имеет дискретный характер.
Так как информация о состоянии объекта управления является непрерывной, то перед подачей на вход ЦВМ ее необходимо преобразовать в дискретную форму. Эту задачу выполняет преобразователь “ аналог – код ”, который в теории автоматического управления принято называть импульсным элементом” (ИЭ). Дискретизация осуществляется путем квантования непрерывного сигнала по времени и по уровню. Это означает, что аналоговый сигнал в ИЭ через равные промежутки T заменяется дискретными по уровню значениями, ближайшими к значениям непрерывного сигнала (рис.8.1).
Р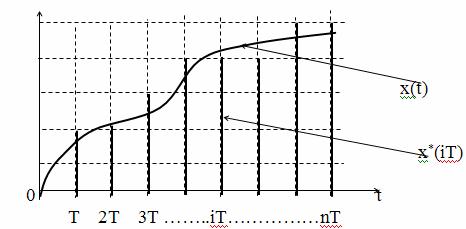 ис.8.1.
Дискретизация непрерывного сигнала
ис.8.1.
Дискретизация непрерывного сигнала
В результате дискретизации непрерывный сигнал заменяется серией импульсов бесконечно малой длительности, амплитуда которых близка к значениям непрерывного сигнала в моменты дискретизации.
Все вышесказанное позволяет общую схему дискретной (цифровой) САУ изобразить в виде, показанном на рис.8.3.
Рис. 8.3. Схема дискретной САУ
Н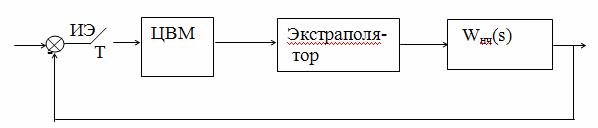 а
схеме под Wнч(s)
подразумевается непрерывная часть
системы.
а
схеме под Wнч(s)
подразумевается непрерывная часть
системы.
Какой формирующий элемент называют экстраполятором нулевого порядка?
После производства вычислений на выходе ЦВМ информация появляется также в виде тешетчатой функции. Перед подачей этой информации на исполнительную систему, которая является аналоговой, ее необходимо преобразовать из дискретной в непрерывную. Эту задачу решают преобразователи “код – аналог”, которые в теории автоматического управления получили название экстраполяторов. В полном соответствии со своим наименованием, эти устройства экстраполируют значение сигнала на такт вперед. Наиболее часто используется экстраполятор нулевого порядка, который реализует операцию
![]() (8.1)
(8.1)
Работа экстраполятора нулевого порядка иллюстрируется рис.8.2.
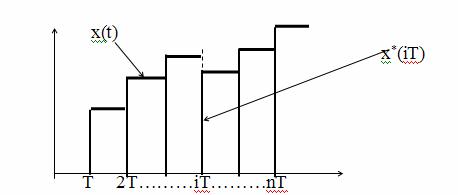
Рис.8.2. Работа экстраполятора нулевого порядка
Что представляет собой сигнал на выходе идеального импульсного элемента?
Так как информация о состоянии объекта управления является непрерывной, то перед подачей на вход ЦВМ ее необходимо преобразовать в дискретную форму. Эту задачу выполняет преобразователь “ аналог – код ”, который в теории автоматического управления принято называть импульсным элементом” (ИЭ). Дискретизация осуществляется путем квантования непрерывного сигнала по времени и по уровню. Это означает, что аналоговый сигнал в ИЭ через равные промежутки T заменяется дискретными по уровню значениями, ближайшими к значениям непрерывного сигнала (рис.8.1).
Р ис.8.1. Дискретизация непрерывного сигнала
В результате дискретизации непрерывный сигнал заменяется серией импульсов бесконечно малой длительности, амплитуда которых близка к значениям непрерывного сигнала в моменты дискретизации.
Дайте определение Z-передаточной функции?
Для анализа и синтеза дискретных САУ используется дискретное преобразование Лапласа в форме Z – преобразования [9].
Решетчатая функция x*(t), полученная из непрерывной функции x(t), может быть записана в виде
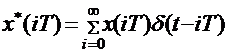 ,
(8.2)
,
(8.2)
где d(t-iT) – дельта – функция.
Найдем преобразование Лапласа от выражения (8.2).
 (8.3)
(8.3)
Обозначим
![]() .
Тогда можно записать
.
Тогда можно записать
 (8.4)
(8.4)
Это и есть Z – преобразование функции x(t).
В решении каких прикладных задач целесообразно использовать цифровые системы управления?
Цифровые системы строятся на базе комплекса средств вычислительной техники, основными элементами которого являются: 1) ЦВМ, 2) устройства ввода, 3) устройства вывода.
Функции ЦВМ могут выполнять: 1) ЭВМ (компьютеры), 2) DSP - цифровые сигнальные процессоры, 3) ЦУ на жесткой логике. Первые относятся к универсальным устройствам управления, вторые специализированны для приложений, третьи разрабатываются для конкретных устройств (например, цифровой фильтр, имеющийся в каждом ΣΔ АЦП).
Приведите значение предельного коэффициента передачи цифровой САУ с С-регулятором, если в качестве непрерывной части выбрано идеальное интегрирующее звено?
Сформулируйте условие физической реализуемости цифровых регуляторов?
Сформулировать необходимое и достаточное условие устойчивости линейных непрерывных систем в терминах импульсных фильтров?
Уравнение
![]() (8.10)
назовем характеристическим уравнением
замкнутой системы. При исследовании
непрерывных систем было установлено,
что для их устойчивости необходимо и
достаточно, чтобы каждый корень
характеристического уравнения si=ai
± jbi имел отрицательную
вещественную часть. Учитывая, что
,
для каждого корня уравнения (8.10) можно
записать
(8.10)
назовем характеристическим уравнением
замкнутой системы. При исследовании
непрерывных систем было установлено,
что для их устойчивости необходимо и
достаточно, чтобы каждый корень
характеристического уравнения si=ai
± jbi имел отрицательную
вещественную часть. Учитывая, что
,
для каждого корня уравнения (8.10) можно
записать
![]() (8.11)
(8.11)
Это
выражение есть уравнение окружности
радиуса
![]() Нетрудно
видеть, что при нахождении системы на
границе устойчивости, когда ai=0,
радиус R=1, и это есть уравнение
границы устойчивости дискретной системы.
Для устойчивой непрерывной системы ai
< 0 , что соответствует значению
радиуса R<1.
Нетрудно
видеть, что при нахождении системы на
границе устойчивости, когда ai=0,
радиус R=1, и это есть уравнение
границы устойчивости дискретной системы.
Для устойчивой непрерывной системы ai
< 0 , что соответствует значению
радиуса R<1.
Для устойчивости дискретной системы необходимо и достаточно, чтобы все корни ее характеристического уравнения были по модулю строго меньше единицы или, что тоже самое, лежали внутри круга единичного радиуса.
К каким характеристикам будут приближаться частотные характеристики импульсного фильтра при увеличении частоты квантования?
При увеличении частоты квантования частотные характеристики импульсного фильтра будут приближаться к характеристикам линейно непрерывной системы.
Сформулировать аналог критерия Гурвица?
Формулировка критерия Гурвица для
непрерывных систем справедлива и для
дискретных систем, если в характеристическом
уравнении системы произвести замену
![]()
Введем комплексную переменную w, связанную с комплексной переменной z билинейным преобразованием:
![]() ,
где
,
где
![]() ,
относительная безразмерная
,
относительная безразмерная
псевдочастота.
Тогда,
произведя замену в характеристическом
полиноме
![]() |
|![]() ,
получим характеристический полином
,
получим характеристический полином
![]() по
которому определим устойчивость системы
по критерию Гурвица.
по
которому определим устойчивость системы
по критерию Гурвица.
При изменении частоты
![]() в
пределах
в
пределах
![]() относительная псевдочастота
относительная псевдочастота![]() пробегает
все значения от -
до +,
а комплексная переменная w
движется по оси мнимых чисел от -j
до +j.
Внутренняя часть круга единичного
радиуса отображается при этом на левую
полуплоскость.
пробегает
все значения от -
до +,
а комплексная переменная w
движется по оси мнимых чисел от -j
до +j.
Внутренняя часть круга единичного
радиуса отображается при этом на левую
полуплоскость.
При помощи w - преобразования осуществляется конформное отображение внутренности окружности единичного радиуса на плоскости z в левую полуплоскость w. При этом контур окружности единичного радиуса переходит в мнимую ось плоскости w.
При исследовании дискретных систем по преобразованным при помощи w - преобразования передаточным функциям могут использоваться обычные приемы и критерии, справедливые для непрерывных систем, в том числе и критерий Гурвица.
![]() -
характеристическое уравнение импульсной
системы
-
характеристическое уравнение импульсной
системы
Критерий Гурвица
Для того чтобы линейная импульсная система была устойчива необходимо и достаточно, чтобы все коэффициенты характеристического полинома D(w) были положительны и все миноры матрицы Гурвица должны быть больше нуля.