

Экзаменационный билет № 7 по курсу «Теория автоматического управления».
Часть 2
Типовые задачи
Задача №1.
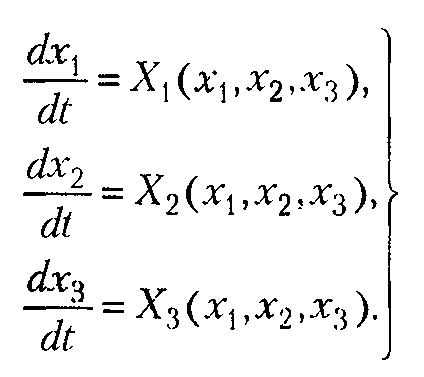
Уравнение состояния и наблюдения динамической системы имеют вид:
;
Определить передаточную функцию системы.
Ответ:
![]()
Задача №2.
Исследовать
наблюдаемость системы по состоянию,
если её модель в пространстве состояний
имеет вид:
![]()
Задача №3.
Для импульсной
системы (рис.1) определить изображение
выходного сигнала
и передаточную функцию
![]() .
.
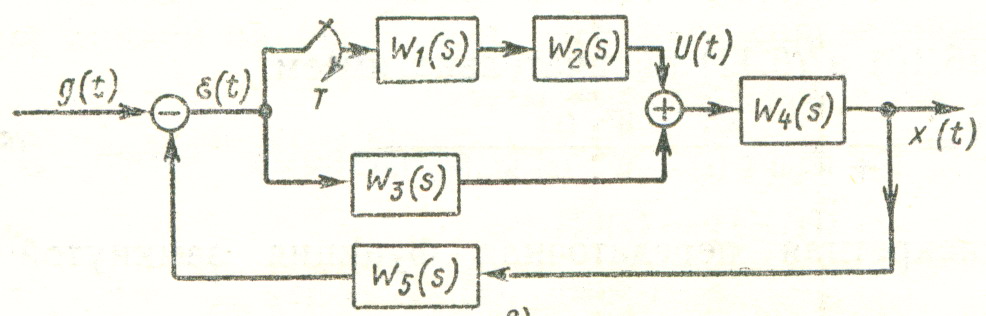
Рис.1.
Задача №4.
Определить
амплитуду
![]() установившейся ошибки системы, если
установившейся ошибки системы, если
![]()
Решение:
![]()
![]()
Экзаменационный билет № 8 Вопросы
Что понимается под управляемостью динамической системы по выходу?
Система полностью управляема тогда, когда ранг матрицы управляемости полный и детерминант матрицы не равен 0.
Как разделяются динамические системы по области определения?
Основные признаки разделяющие динамические системы по характеру внутренних процессов:
Непрерывность или дискретность (прерывистость) динамических процессов по времени
Линейность или нелинейность уравнений, описывающих динамику процессов управления
Следовательно по первому признаку делят системы на непрерывные , системы дискретного времени (импульсные или цифровые) и системы релейного действия.
По второму признаку каждый из классов, кроме релейного, делится на системы линейные и нелинейные.
Какие системы управления относят к следящим системам?
Следящая система управления — вид системы автоматического управления, в которой заранее неизвестен вид управляющего воздействия. Обычно следящие системы предназначены для воспроизведения на выходе изменения управляющего воздействия, слежения за ним.
О динамических свойствах следящей системы можно судить по величине ошибки. Также сигнал ошибки в следящих системах является сигналом, в зависимости от величины которого осуществляется управление объектом.
В следящих системах управляющее воздействие также является величиной переменной, но математическое описание его во времени не может быть установлено, так как источником сигнала служит внешнее явление, закон изменения которого заранее неизвестен.
Так как следящие системы предназначены для воспроизведения на выходе управляющего воздействия с возможно большей точностью, то ошибка, так же как и в случае систем программного регулирования, является той характеристикой, по которой можно судить о динамических свойствах следящей системы. Ошибка в следящих системах, как и в системах программного регулирования, является сигналом, в зависимости от величины которого осуществляется управление исполнительным двигателем.
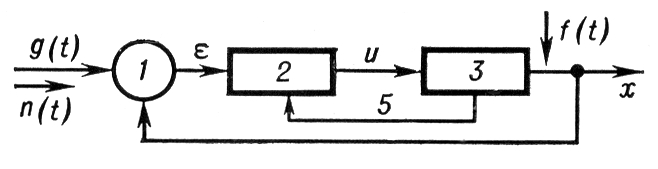
Рис. 1. Блок-схема следящей системы: g(t) — заданная входная величина; n(t) — помехи; e — сигнал рассогласования; u — сигнал управления; f(t) — возмущающее действие; x — выходная величина; 1 — сравнивающее устройство; 2 — усилитель-преобразователь; 3 — исполнительное устройство; 4 — цепь главной обратной связи; 5 — цепь вспомогательной (местной) обратной связи.
Какие системы управления относят к следящим системам? (одинаковый)
Дайте классическое определение устойчивости состояния равновесия (устойчивости по Ляпунову)?
Теорема формулируется следующим образом: если при заданных уравнениях системы n-го порядка можно подобрать такую знакоопределенную функцию Ляпунова V (х1 х2,...,xn), чтобы ее производная по времени W (х1 х2,...,xn) тоже была знакоопределенной (или знакопостоянной), но имела знак, противоположный знаку V, то данная система устойчива. При знакоопределенной функции W будет иметь место асимптотическая устойчивость.
Поэтому, если производная dV/dt=(x1x2,...,xn) окажется знакоонределепной отрицательной, то это свидетельствует об устойчивости данной системы.
Понятие устойчивости по Ляпунову допускает, чтобы при накоопределенной функции V производная от нее W была не обязательно знакоопределенной или знакопостоянной, а могла быть и тождественно равна нулю во всем рассматриваемом фазовом пространстве
Сформулируйте (по Ляпунову) необходимое и достаточное условие устойчивости состояния равновесия динамических систем второго порядка по модели, линеаризованной в малых отклонениях?
Возьмем знакоопределенную положительную функцию Ляпунова в виде
V = a2xl2+b2x22+c2x32
где а,Ь,с — произвольно заданные вещественные числа.
Будем придавать величине V возрастающие постоянные значения: V=0, С1, С2, C3
, что означает

Первое из этих выражений соответствует одной точке x1, = х2 = xd3 = 0 (началу
координат фазового пространства), а остальные — поверхностям эллипсоидов в фазо-
вом пространстве, причем каждый последующий эллипсоид содержит внутри себя
целиком предыдущий.
Возьмем теперь производную от функции Ляпунова по времени.
dV/dt= 2а2 xlXl(x1,х2,х3) + 2Ь2 х2Х2(х1,х2,х3) + 2с2 (х1,х2,х3)= W(х1,х2,х3)
где функции X1 X2, X3 берутся из заданных уравнений системы).
Если полученная таким путем функция W(x1,x2,x3) окажется знакоопределепной
отрицательной, т. е. если
dv/dt<0
во всех точках исследуемого фагювого пространства, кроме одного только начала коор-
динат, где dv/dt=0 (при Х1 = Х2 = Х3= 0),
Как определяются запасы устойчивости по модулю и по фазе?
Определение: критическими (граничными)
будем называть такие значения матриц
A, при которых система находится на
границе устойчивости, Re
![]() (A) = 0 .
(A) = 0 .
Определение: запасом устойчивости называется диапазон значений параметра от номинального до граничного.
Частотные оценки запаса
Частотные запасы устойчивости характеризуют, в соответствии с критерием Найквиста, удаление амплитудно - фазовой характеристики разомкнутой системы от критической точки с координатами {-1, j0}.

Запас устойчивости по амплитуде (h) показывает, насколько можно увеличить амплитуду без потери устойчивости системы.
Запас устойчивости по фазе (![]() )
показывает, насколько можно изменить
фазу системы без потери ею устойчивости.
)
показывает, насколько можно изменить
фазу системы без потери ею устойчивости.
Определение запасов устойчивости по АФХ
Опытным путем установлено, что для нормальной работы система должна обладать следующими запасами устойчивости:
h = 50-80% , = 50-80% . (4.34)
Аналогичные запасы устойчивости можно определить и по логарифмическим характеристикам системы.
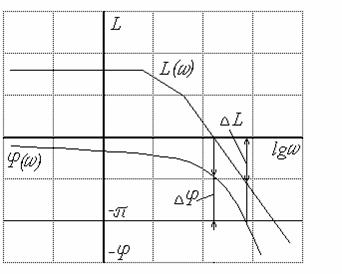
Здесь запас устойчивости по модулю
обозначают как![]() L и измеряют в децибеллах [дБ]. Он
определяется на частоте, где фазовая
частотная характеристика достигает
значения -
L и измеряют в децибеллах [дБ]. Он
определяется на частоте, где фазовая
частотная характеристика достигает
значения -![]() .
.
Запас устойчивости по фазе обозначают
как![]() , он определяется на частоте
, он определяется на частоте![]() , где
, где
![]() ,
,
Дайте рекомендации по применению критерия Найквиста (обычного и инверсного) при исследовании устойчивости линейных систем.
Что понимается под коэффициентом затухания переходного процесса ?
Степень затухания переходного процесса - отношение амплитуд двух перерегулирований (последовательных колебаний одного знака). Числителем является амплитуда первого колебания. Степень затухания показывает во всколько раз уменьшается амплитуда второго колебания по сравнению с первым
Что понимается под коэффициентом затухания переходного процесса ? (одинаковый)
Перечислите методы построения корневого годографа системы?
Качество системы управления с точки зрения быстродействия и запаса устойчивости может характеризоваться расположением корней числителя и знаменателя передаточной функции замкнутой системы, т. е. расположением нулей и полюсов передаточной функции Зная эти корни, можно изобразить их расположение на комплексной плоскости корней. При расчете системы целесообразно проследить, как меняется общая картина расположения корней при изменении отдельных параметров, например коэффициента передачи разомкнутой системы, постоянных времени корректирующих цепей и т. п., с целью установления оптимальных значений этих параметров.
При плавном изменении значения какого-либо параметра корни будут перемещаться па плоскости корней, прочерчивая некоторую кривую, которую будем называть корневым годографом или траекторией корней. Построив траектории всех корней, можно выбрать такое значение варьируемого параметра, которое соответствует наилучшему расположению корней.
Какая линейная динамическая система называется частично наблюдаемой?
Система частично наблюдаема тогда, когда ранг матрицы наблюдаемости полный.
Сформулируйте необходимое условие устойчивости линейной системы
Для асимптотической устойчивости системы необходимо и достаточно, чтобы вещественные части корней были отрицательными.
Необходимым (но недостаточным) условием устойчивости системы является положительность коэффициентов ее характеристического уравнения.
Какие тины границ устойчивости линеаризованных систем можно выделить и чем они характеризуются?
Система находится на границе апериодической устойчивости если все корни левые и в характеристическом уравнении есть нулевой корень an=0.
При наличии пары чисто мнимых корней граница устойчивости называется колебательной.
Дайте определение идентифицируемой линейной динамической системы?
Система полностью идентифицируема тогда, когда ранг матрицы идентификации полный и детерминант матрицы не равен 0.
Назовите параметры, характеризующие импульсный элемент?
Амплитуда и ширина импульса
Какой импульсный элемент с амплитудной модуляцией принято называть реальным?
Реальным импульсным элементом с амплитудной модуляцией называется последовательное включение ИИЭ и некоторого формирующего устройства.
АИМ – амплитуда импульса пропорциональна значению непрерывного сигнала на входе импульсного элемента в момент квантования сигнала.
Какое квантование непрерывного сигнала принято называть импульсной модуляцией?
Модуляция состоит в умножении входной величины — огибающей x(t) на немодулированную последовательность *Т(t), Следовательно, выходная величина простейшего импульсного элемента x*(t), представляющая собой модулированную последовательность функций, будет равна
![]() (1)
(1)
Изображение непрерывной входной величины простейшего импульсного элемента x(t) по определению равно
![]()
Какие импульсные САУ относят к синфазным?
Дайте определение решетчатой функции?
Решетчатой функцией называется функция, которая определена только в моменты времени и неопределенна в промежутках между ними.
Где должны располагаться полюса замкнутой z-передаточной функции с тем, чтобы выполнялось необходимое и достаточное условие устойчивости стационарной линейной импульсной системы.
Из этого неравенства и абсолютной сходимости ряда дискрет временной характеристики следует, что передаточная функция К*(р) устойчивой импульсной системы должна быть ограничена в правой полуполосе Re p 0, т. е. К*(р) не должно иметь особых точек—полюсов в правой полуполосе Re p 0 .Таким образом, импульсная система будет устойчива только тогда, когда все полюсы К*(р) будут расположены в левой полуполосе, или, короче, если все полосы К*(р)—левые.
Полюсы К*(р) определяются нулями характеристического многочлена G*(р). Поэтому мы приходим к заключению, что импульсная система будет устойчива, если все нули характеристического многочлена G*(р) будут левые.
Поясните почему для исследования устойчивости линейных импульсных систем с амплитудной модуляцией не применим критерий Гурвиц, используемый для исследования линейных непрерывных систем?
Система содержащая ЧИМ относится к классу нелинейных систем
Какие косвенные показатели качества по аналогии с непрерывными системами характеризуют переходной процесс в цифровых САУ?
Алгебраические (анализ коэффициентов характеристического полинома) и частотные методы используются для исследования устойчивости в цифровых САУ
При каком допущении цифровые системы по времени могут рассматриваться как линейные?
Сформулируйте условие грубости замкнутой импульсной системы?
Под грубой системой подразумевается система, в которой при малых отклонениях параметров элементов, системы отклонения величин, характеризующих состояние системы, также малы.