

2.1.3. Тяговый расчет и расчет устойчивости скрепера
Тяговый расчет скрепера заключается в определении силы и мощности тяги, необходимых для преодоления рабочих и транспортных сопротивлений, возникающих на рабочем и ходовом оборудовании, и в подборе соответствующих тягача или толкача. Для собственно скрепера определяют также его рабочую массу, наибольший вес породы в ковше и рабочие нагрузки.
Скреперы с самозагрузкой. Общее сопротивление движению груженого скрепера Wс (кН) по уклону в конце его заполнения зависит от составляющей сопротивления копанию WK и веса Wп или масс собственно тягача mт (т), агрегатированного скреперного оборудования mc (т), грунта в ковше скрепера mг (т), т. е.
Wс= Wп+ WK= g (тт + тс + тг) (fк±i) + 0,5 KFB t, (2.11)
где fк и i – коэффициенты сопротивления качению и уклону пути, %;
KF =320…360 – коэффициент сопротивления породы копания
ножом скрепера, кПа;
В - ширина режущего ножа ковша, м;
t - толщина стружки, м.
В транспортном положении (рис. 2.4, а) на скрепер действуют активные и реактивные силы. Активные силы включают в себя: динамическую силу G1 и окружную силу РК на ведущих колесах.
Динамическая сила равна
G1 = G∙КД ,
где G - сумма весов тягача, скреперной установки и породы в ковше,
заполненном «с шапкой»;
Кд – коэффициент динамичности, принимаемый для скреперов
равным Kд=2.
К реактивным силам относятся вертикальные реакции R1 и R2 на колесах со стороны грунта и силы сопротивления перекатыванию колес Pf1 и Pf2.
В транспортном положении скрепера силы РК направлены на преодоление сопротивлений качению:
Pf1 = R1fк и Pf2 = R2fк..
Из уравнений моментов относительно точек А и В (см. рис.2.4, а) и суммы проекций сил на оси х и у будем иметь значения
R1=G1 d/L; R2=G1 – R1 и РК≥(R1 + R2)fk = fk G1,
где d и L - координаты сил (см. рис. 2.4, а).
Для скрепера со всеми ведущими колесами окружная сила Рк на ведущих колесах представляет собой сумму окружных сил, действующих на передние Рк1 и задние Рк2 колеса.
Конец заполнения и начало подъема ковша (рис. 2.4, б). Груженый скрепер движется по горизонтали (Кд=1), опираясь на все колеса. Здесь активными силами являются: окружные РкI и Рк2 на колесах ведущих осей; вес G1 груженого «с шапкой» скрепера и толкающая Тт вспомогательного толкача; реактивными - силы Pf1 и Рf2 сопротивлений движению передних и задних колес; Wc - сопротивления резанию и перемещению скрепера; RB – вертикальная реакция со стороны породы на лезвии ковша скрепера:
RB = Кс Wc = (0,37…0,45) Wc.
В рассматриваемом положении тяговые усилия скрепера и толкача расходуются на передвижение скрепера, срезание породы и заполнение ковша.
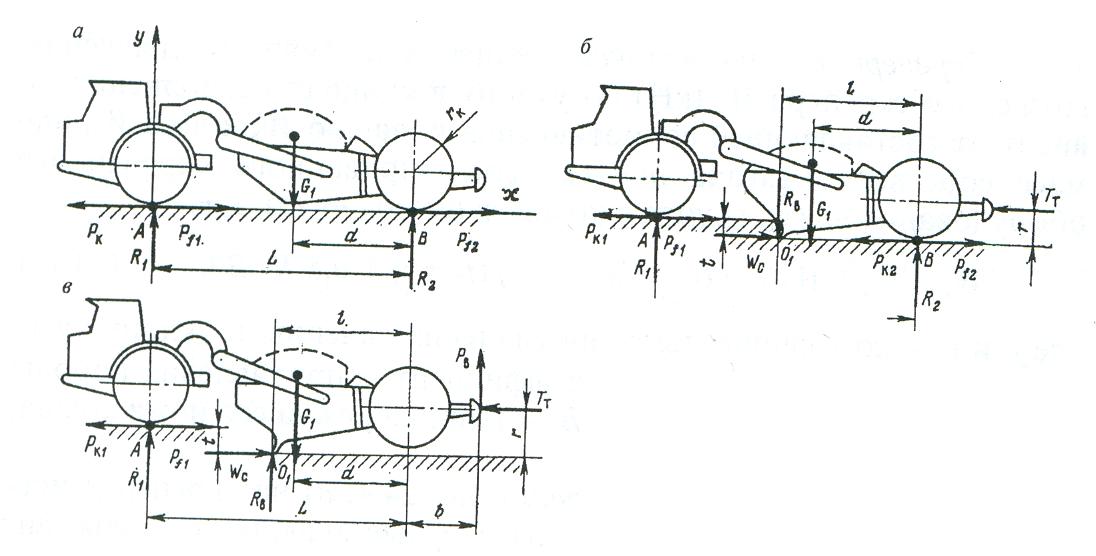
Рис. 2.4. Схемы сил, действующих на скрепер в различных режимах:
а - транспортном; б - конца заполнения ковша; в - копания с вывешенными задними колесами
Одновременно должно развиваться максимально возможное тяговое усилие. Окружные силы на ведущих колесах (реализация по сцеплению):
Рк1=R1 φmax и Рк2=R2 φmax ,
где φmax - максимальный коэффициент сцепления.
Принимая, что в конце наполнения ковша толщина стружки t=0 из уравнения моментов относительно точек А и В (см. рис.2.4, б) и суммы проекций сил на оси х и у, имеем
R1=(G1 d + RB l)/L или R1 = G1+ RB – R2;
R2=[ –Wc t + RB (L – l) + G1 (L – d)]/L;
Wc=[G1 (φmax – fk) +Тт]/[1 – Кс(φmax –fk)].
Режим копания с вывешенными задними колесами скрепера
(рис. 2.4, в) может иметь место под действием реакции породы на лезвии ковша и толкающего усилия. В этом случае груженый «с шапкой» скрепер движется по горизонтальной поверхности и опирается на передние колеса и нож (R2= 0). Из уравнения моментов относительно точек А и O1 и суммы проекций сил на оси х и у определяют величины Pk1; Pf1; Wc; R1; Rв.
Расчет устойчивости агрегата, состоящего из одноосного тягача и полуприцепного скрепера, при прямолинейном движении ведется в продольном и боковом направлениях. В первом случае предполагается, что сползание агрегата вдоль уклона с углом α начинается раньше опрокидывания агрегата (т.е. tg α ≥ φmin , где φmin - минимальный коэффициент сцепления).
Устойчивость скрепера в боковом направлении на уклоне зависит от высоты расположения центров тяжести агрегата и полуприцепа. Грани опрокидывания агрегата - линии соединения точек опор передних и задних колес по боковым плоскостям. Грани опрокидывания полуприцепа - линии, соединяющие шарнир седельно-сцепного устройства с точками контакта задних колес полуприцепа с грунтом. Устойчивость агрегата при крутом повороте определяется в статическом положении на уклоне с заданным углом и при движении на повороте.
Основные параметры скреперов ориентировочно можно определить по эмпирическим зависимостям в функции вместимости ковша Е от 3 до 25 м3 (табл. 2.4).
Таблица 2.4
Зависимости для определения параметров скрепера
Параметры |
Прицепные скреперы |
Самоходные скреперы |
Вместимость ковша с шапкой, м3 |
(1,1 – 1,52) Е |
(1,19 – 1,45) Е |
Мощность тягача, кВт |
(8,5–14)(1–1,7) Е |
(21 – 32)Е |
Грузоподъемность скрепера, т |
(1,78 – 1,82) Е |
(1,8 – 2) Е |
Масса, т: собственно скрепера (сухая) агрегата с трактором: однодвигательным двухдвигательным |
(0,9 – 1,1) Е
– – |
(1,25 – 1,33) Е
(2,26 – 2,75) Е (2,76 – 2,95) Е |