

Лекция № 5
5.Отклонения формы, расположения и шероховатость поверхностей.
5.1. Шероховатость поверхностей.
Шероховатость – периодически повторяющиеся выступы и впадины на поверхности.
S/H > 1000 – шероховатость, где S – шаг неровностей, H – высота неровностей.
При S/H = 50…1000 – волнистость.
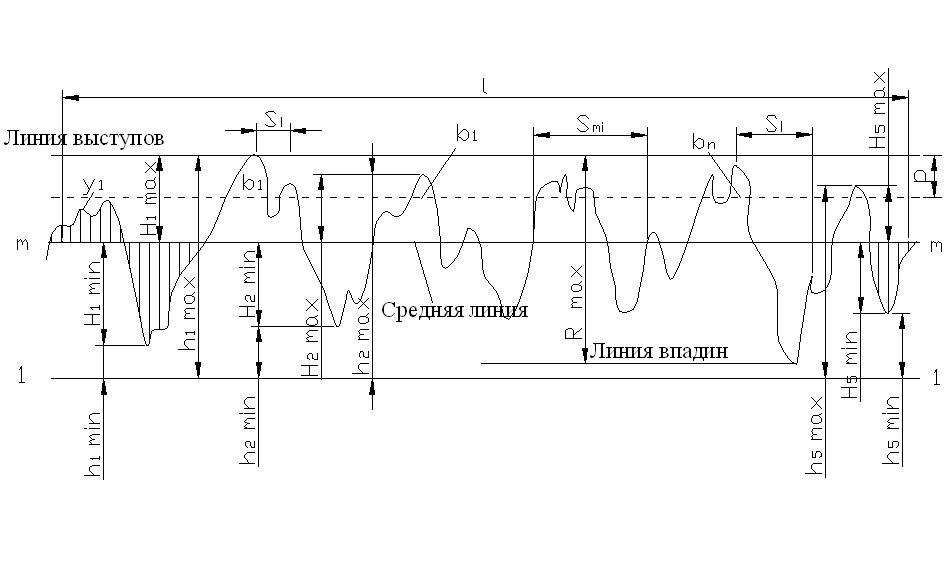
Где:
L – базовая длина
m-m – средняя линия
1-1 – произвольная линия, параллельная средней линии, относительно которой измеряются размеры вершин и впадин
H1min…H5min – пять минимальных размеров вершин
H1max…H5max – пять максимальных размеров вершин
h1min…h5min – пять минимальных размеров впадин
h1max…h5max – пять максимальных размеров впадин
Si – шаг по вершинам
Smi – шаг по средней линии
P – процент от Rmax
bn – отрезки отсекаемые линией, проведенной на расстоянии Р от линии выступов
L – базовая длина; L = 0,01; 0,03; 0,08; 0, 25; 0,80; 2,5; 8; 25 мм;
Ra - среднее арифметическое отклонение профиля
 ;
;
Rz - высота неровностей профиля по 10 точкам.

Sm
– средний шаг неровностей;
S
– средний шаг неровностей по вершинам;

tp
- относительная
опорная длина профиля;
tp = 10, 15, 20, 25, 30, 40, 50, 60, 70, 80, 90% ;
P = 5, 10, 15, 20, 25, 30, 40, 50, 60, 70, 80, 90%.
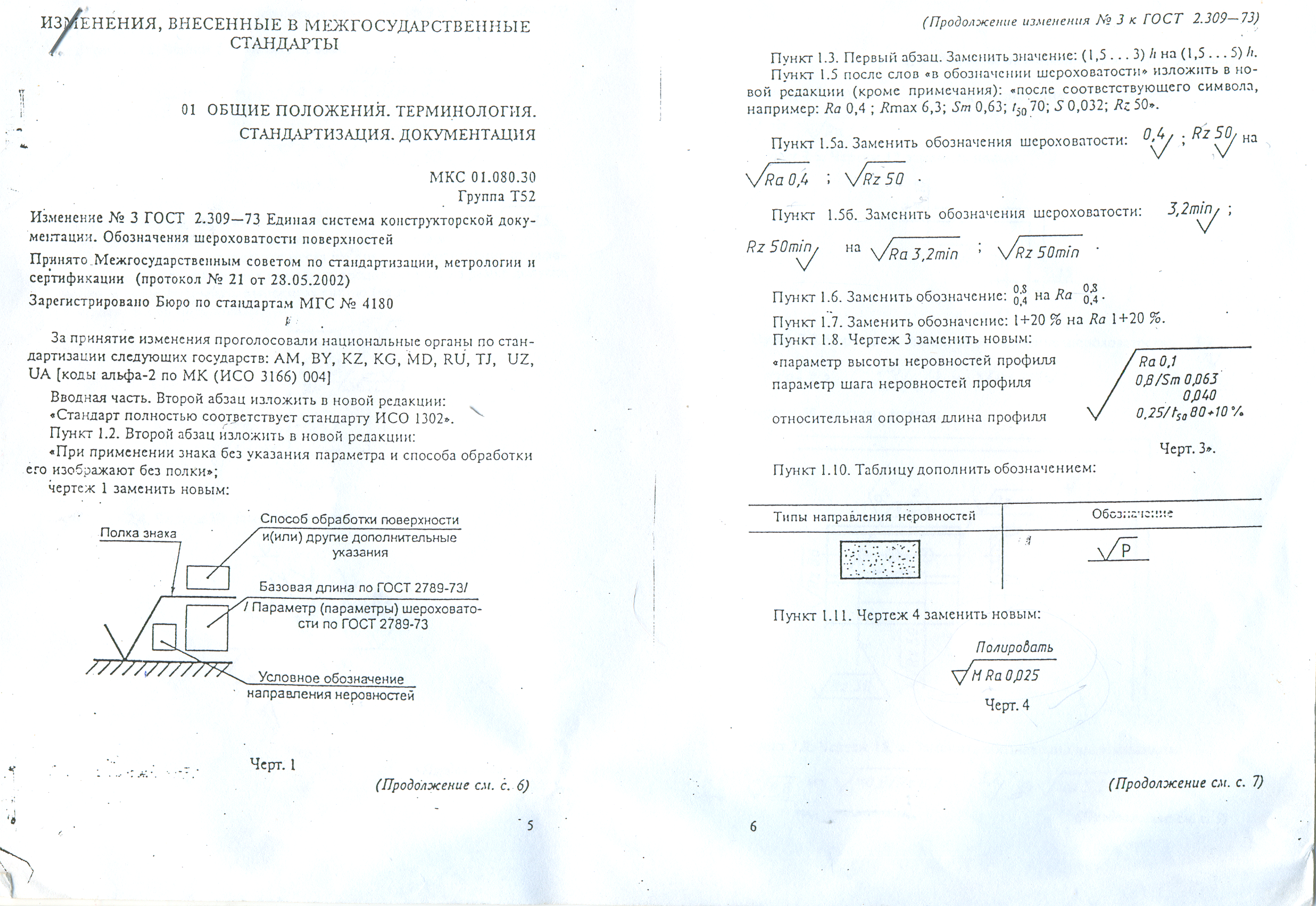
Примеры обозначения шероховатости на чертежах.
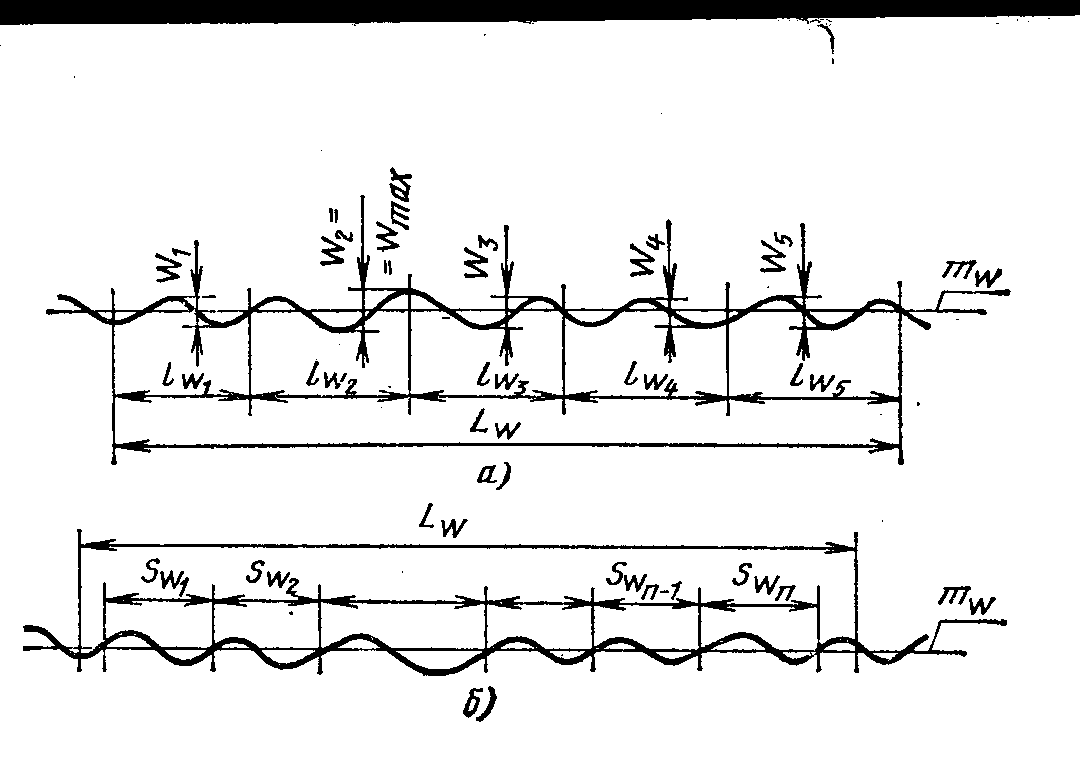
5.2.1 Волнистость поверхности.
Wz – высота волнистости; Sw – шаг волнистости,
Wz = 0,2(W1 + W2 + W3 + W4 + W5 ) ;
 .
.
Средняя линия профиля m – базовая линия, имеющая направление измеренного профиля и делящая его таким образом, чтобы в пределах базовой длины площади, расположенные по обеим сторонам от этой линии до контура профиля были равными между собой.
5.2.Отклонения формы и расположения поверхностей.
5.2.1.Отклонения формы
Действительная поверхность – поверхность, ограничивающая тело, отделяющая его от окружающей среды.
Действительный профиль – профиль, получаемый при сечении реальной поверхности плоскостью.
Геометрическая поверхность – идеальная поверхность, номинальная форма которой задана на чертеже.
Геометрический профиль – профиль, получаемый при сечении геометрической (номинальной) поверхности плоскостью.
Базовая поверхность формы – поверхность, имеющая форму номинальной поверхности (или эквидистантной) и служащая базой для количественной оценки отклонения формы реальной поверхности.
Прилегающая поверхность – базовая поверхность, соприкасающаяся с реальной поверхностью детали
Поле допуска формы – пространство (или площадь в заданной плоскости), внутри которого должны находиться все точки реально рассматриваемого элемента на нормируемом участке.
Поле допуска формы поверхности – пространство, ограниченное эквидистантными линиями (поверхностями), огибающими семейство окружностей (сфер), диаметр которых равен допуску формы поверхности, а центры находятся на номинальной поверхности.
К отклонениям плоских поверхностей относятся отклонения от прямолинейности и плоскостности: отклонения от прямолинейности (непрямолинейность, изогнутость); отклонение от плоскостности (неплоскостность); отклонение от цилиндричности (нецилиндричность); отклонение от круглости (некруглость); отклонения профиля продольного и поперечного сечения; овальность; огранка.