

Лекция № 22 Планетарные передачи.
Планетарными называются передачи, в которых «колеса–сателлиты» 2 обкатываются по центральному колесу 1 и опорному колесу Оимеют подвижные оси, закрепленные на водиле Н. Планетарные передачи являются редукторами и предназначены для преобразования угловой скорости при изменении моментов сил.
Ведущее
– центральное колесо 1 (солнечное).
Параметры и Мкр
передаются посредством сателлитов 2,
обкатывающихся по неподвижному опорному
зубчатому колесу 0 с внутренними зубьями.
Выходным является вал водила Н, к
которому через соединительную муфту
присоединяется вал нагрузки. В конструкции
может быть 2, 3, 4 сателлита. В передаче
вращающих моментов одновременно
участвует несколько участков зубчатого
венца колеса 1. Таким образом, каждый
сателлит передает уменьшенный вращающий
момент. Это позволяет применять зубчатые
колеса с меньшими модулями и значительно
сократить габариты передачи.
и Мкр
передаются посредством сателлитов 2,
обкатывающихся по неподвижному опорному
зубчатому колесу 0 с внутренними зубьями.
Выходным является вал водила Н, к
которому через соединительную муфту
присоединяется вал нагрузки. В конструкции
может быть 2, 3, 4 сателлита. В передаче
вращающих моментов одновременно
участвует несколько участков зубчатого
венца колеса 1. Таким образом, каждый
сателлит передает уменьшенный вращающий
момент. Это позволяет применять зубчатые
колеса с меньшими модулями и значительно
сократить габариты передачи.
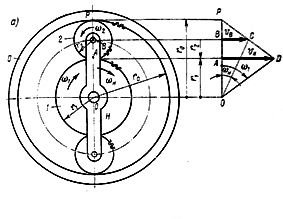
22.1. Определение по плану скоростей.
В соответствие с обозначениями на рисунке 22.1:
Скорость
точки контакта сателлита и опорного
неподвижного колеса равна 0
Окружная скорость центра колеса 2 равна скорости водила.

Следовательно:
 рассматривается
как передаточное отношение от солнечного
колеса к вращающемуся опорному колесу
через паразитное колесо 2 при условно
неподвижном водиле. Знак (-) учитывает,
что опорное и центральное колеса
вращаются в противоположных направлениях.
рассматривается
как передаточное отношение от солнечного
колеса к вращающемуся опорному колесу
через паразитное колесо 2 при условно
неподвижном водиле. Знак (-) учитывает,
что опорное и центральное колеса
вращаются в противоположных направлениях.
 - неподвижное опорное колесо;
- неподвижное опорное колесо;
 - неподвижное водило.
- неподвижное водило.
22.2. Определение i0 методом обращенного движения
Теорема Смирнова-Виллиса.
Рассмотрим планетарную передачу как обычную рядную. Для этого мысленно остановим водило и дадим возможность вращаться опорному колесу.
-
Подвижный элемент
Угловые скорости
При неподвижном колесе
При неподвижном водиле
1. Ведущее колесо 1
-

2. Опорное колесо 0
0
-
3. Водило
0
4. Сателлит 2

-
По данным таблицы записываем передаточное отношение и приходим к полученной ранее формуле.
Для правильной работы планетарной передачи требуется выполнение условия соосности, которое используется как уравнение связи чисел зубьев колес в передаче.
Классический случай:
Лекция № 27 Направляющие прямолинейного движения
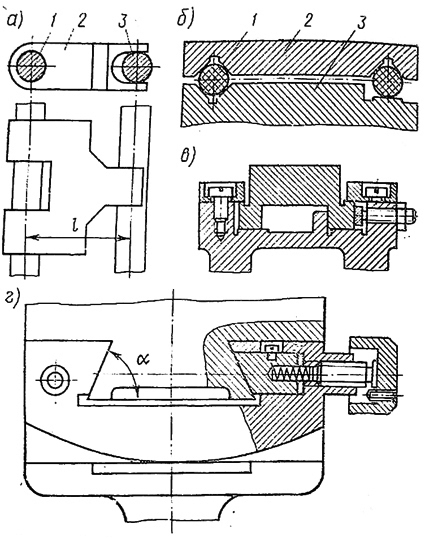
Направляющие делятся на направляющие с трением скольжения и направляющие с трением качения. Направляющие с трением скольжения просты в изготовлении, имеют малые габариты, но чувствительны к колебаниям температур. Направляющие с трением качения обладают высокой точностью и обеспечивают легкость движения, но имеют более сложную конструкцию и большие габариты.
По конструктивному признаку различают цилиндрические направляющие скольжения (рабочими являются цилиндрические поверхности - цилиндрические направляющие, где ползун 2 с цилиндрической и плоской рабочими поверхностями перемещается по цилиндрическим поверхностям стержней 1 и 3; - цилиндрические направляющие, где каретка 2 с призматическими рабочими поверхностями перемещается по цилиндрическим стержням 1, закрепленным на основании 3;
Н, П и Т- образные направляющие, призматические типа «ласточкин хвост».
По форме тел качения различают направляющие на шариках и роликах. В качестве роликов могут быть использованы стандартные подшипники качения.
В зависимости от способа установки шариков различают направляющие с перекатывающимися и вращающимися вокруг своей оси шариками. В первом случае оси тел качения перемещаются как относительно каретки, так и относительно основания. Во втором случае тела качения при перемещении каретки вращаются в своих гнездах, а оси тел качения неподвижны относительно каретки и основания.