

31.2 Кинематика кулачковых передач
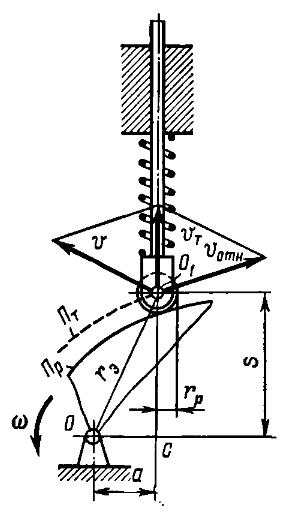
рис. 31.6
На рис. 31.6 показана кулачковая передача с поступательно перемещающимся дезаксиальным роликовым толкателем. Дезаксиальной эта передача называется потому, что средняя линия толкателя не проходит через геометрическую ось вращения кулачка О. Имеет место дезаксиал а = OC, причем OC перпендикулярно CO1. Кулачок вращается с угловой скоростью . При этом геометрическая ось вращения ролика О1 перемещается по прямой вверх и все время находится на штриховой кривой, которая называется теоретическим профилем кулачка Пт. Длина пути s, проходимая толкателем, равна перемещению точки О1. Условно отсчитываем ее от точки С:
 ,
,
где rэ , — радиус-вектор теоретического профиля Пт кулачка.
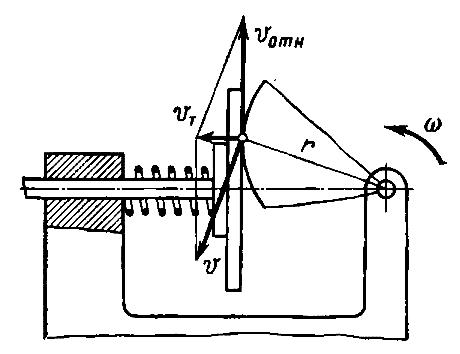
рис. 31.7
На рис. 31.7 построен план скоростей для центральной кулачковой передачи с дисковым кулачком и поступательно перемещающимся плоским толкателем. Окружная скорость кулачка перпендикулярна радиус-вектору r кулачка:
v = r
Относительная скорость vотн, направлена по общей касательной, проведенной к поверхностям кулачка и толкателя в точке их касания. В данном случае она совпадает по направлению с плоскостью толкателя. Скорость толкателя vт направлена вдоль оси направляющей.
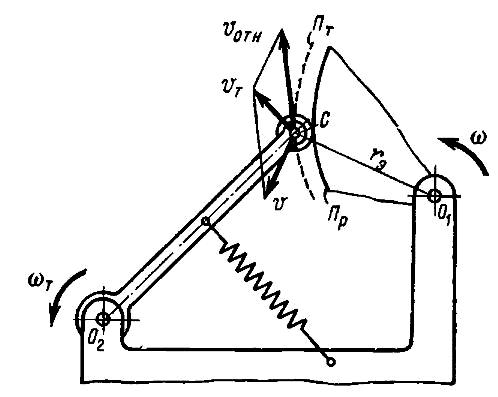
рис. 31.8
На рис. 31.8 показан план скоростей в кулачковом механизме с качающимся толкателем. Толкатель роликовый. Геометрическая ось вращения С ролика находится на теоретическом профиле Пт, кулачка. Реальный профиль Пр кулачка по отношению к теоретическому является эквидистантной кривой. Окружная скорость v перпендикулярна радиус-вектору rэ, а относительная скорость vотн касательна к теоретическому профилю в точке С. Окружная скорость vт толкателя перпендикулярна прямой O2C.
31.3. Силы в кулачковых передачах

рис. 31.9
На рис. 31.9 показаны силы в дезаксиальной кулачковой передаче с поступательно перемещающимся толкателем. Угол между осевой линией толкателя и радиус-вектором, проведенным через точку касания толкателя и кулачка, называют углом толкателя. В общем случае угол — переменная величина. Угол между линией действия силы F, приложенной к толкателю, и нормалью пп к поверхности кулачка в точке касания с толкателем называют углом давления . Угол между направлением радиус-вектора и нормалью к поверхности кулачка или линией действия нормальной силы Fn для той же точки называется углом кулачковой передачи или углом подъема кулачка.
Из треугольника ABE (рис. 31.10) получим формулу для определения угла передачи:
tg = dr / (rd),
где — Угол поворота радиус-вектора кулачка.
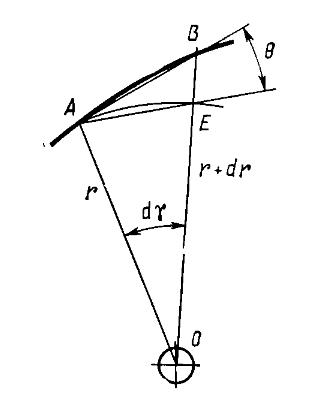

рис. 31.10 рис. 31.11
Треугольник ABE весьма близок к прямоугольному, причем угол ВЕА равен 90°. В этом легко убедиться, если учесть, что угол d — бесконечно малая величина. Угол передачи может быть образован также касательной к поверхности кулачка и перпендикуляром к радиус-вектору, проведенному через точку касания. Из рис. 31.9 следует
= ±
Знак минус принимают, когда точка О находится правее линии действия силы F (рис. 31.11). Для центрального кулачкового механизма
= 0 и =
угол передачи в этом случае равен углу давления. Если не учитывать трения, то сила F, действующая на толкатель, вызовет нормальное давление
Fn = F / cos
Сила трения, действующая на толкатель, равна
Fтр = f Fn
Равнодействующей сил Fn и Fтр является сила Fр. Угол между силами Fp и Fn равен углу трения :
f = tg ,
где f — коэффициент трения между кулачком и толкателем. Увеличение угла давления при заданной силе F вызывает увеличение нормального давления Fn ,что способствует увеличению износа и потерь от трения. Сила Fр , действующая на толкатель, преодолевает силу пружины F и сопротивления от трения в направляющей. При значительных нагрузках реакции F1 и F2 возникают у краев направляющей. Они вызывают появление сил трения
Fтрl = f1 F1 ;
Fтр2 = f1 F2 ,
где f1 — коэффициент трения между толкателем и направляющей.