Передача «винт-гайка».
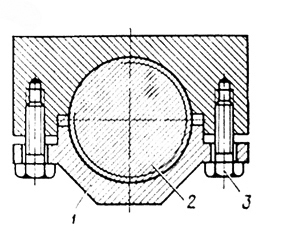
Передачи «винт-гайка» служат для преобразования вращательного движения в поступательное. Основными деталями этой передачи являются - винт (цилиндр с наружной резьбой) и гайка (кольцо с внутренней резьбой).
Эти передачи разделяют на силовые и кинематические (отсчетные). Силовые передачи должны иметь высокий КПД и высокую прочность, кинематические должны обеспечивать точность перемещения.
Существует два варианта применения передачи:
- ведущей деталью является винт, вращательное движение которого переводится в осевое при неподвижной гайке;
- ведущей деталью является гайка, т.е. происходит осевое движение гайки при неподвижном винте.
В передаче применяют метрическую, трапецеидальную и прямоугольную резьбы, с одним, двумя, тремя или четырьмя заходами.
в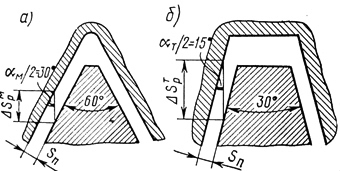 )
)
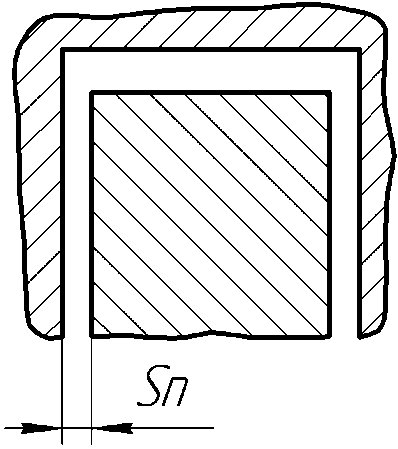 Рис.26.1
Рис.26.1
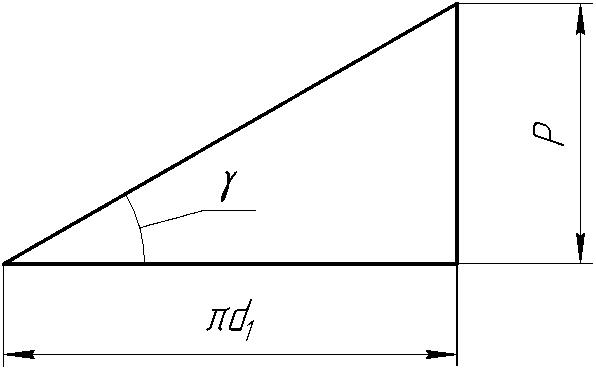
Здесь P – ход витка, т.е. расстояние между одноименными осевыми профилями одного витка по образующей делительного цилиндра: P=pz, где p - шаг – расстояние между соседними витками по образующей цилиндра.
При повороте винта на угол φ гайка поступательно перемещается на расстояние
l = φP(2π),
которое является функцией перемещения передачи.
В дифференциальной передаче винт 1 имеет две резьбы с разными шагами p1 и p2 одного направления (правого и левого).
26.1. Кинематические и силовые соотношения в передаче
В соответствии с обозначением рисунка:
 ;
;
 ;
;
 ;
;
 ;
; 
 ;
;
где V2 – линейная скорость точки, движущейся поступательно вдоль оси винта;
ω1 - угловая скорость вращения винта;
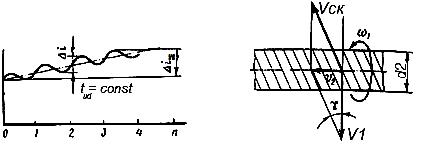
V1 – окружная скорость точки винта, лежащей на окружности среднего диаметра d2;
i – передаточное отношение;
γ- угол подъема винтовой линии (меньше 20..25°).
Относительно большое передаточное отношение i этих передач обеспечивает получение малых линейных перемещений при больших угловых. Из-за погрешностей изготовления винта и гайки передаточное отношение непостоянно.
Во время работы происходит скольжение боковых поверхностей винта и гайки. Скорость скольжения – по касательной к винтовой линии в среднем диаметре резьбы определяется из параллелограмма скоростей:
 ;
;
Vск < V1
Большая скорость относительного скольжения в винтовой передаче приводит к повышенному износу винта и гайки, малому КПД, увеличивает возможность заедания, поэтому для изготовления винта и гайки используют сочетание антифрикционных материалов.
Винт: Ст 45,50; Ст 65Г, 40Х; Ст 40ХФА
Гайка: БрОФ 10-1; БрОЦС 6-6-3.
Силовые соотношения и определение КПД в передаче «винт-гайка».
Силовые соотношения и значения КПД в передаче определяют по аналогии с червячной передачей.
При ведущем винте:
F = Fatg(γ+ρ’);
Mn= Fa d2tg(γ+ρ’);
 ;
;
 .
.
F – окружное усилие, приложенное по касательной к окружности среднего диаметра резьбы (при ведущем винте – движущее усилие, при ведущей гайке – усилие полезного сопротивления);
Fa - осевая нагрузка на гайку (при ведущем винте – усилие полезного сопротивления, при ведущей гайке – движущее усилие);
Mn - момент на вращающемся звене передачи (при ведущем винте – движущий, при ведущей гайке – момент полезного сопротивления);
 -
КПД;
-
КПД;
ρ’- приведенный угол трения;
ƒ - коэффициент трения скольжения между материалами винта и гайки;
α - угол профиля резьбы.
Прямоугольная резьба α = 0°; ƒ’прям = ƒ; ρ’прям = ρ;
Трапецеидальная резьба α = 30°; ƒ’трап = 1.04ƒ; ρ’трап > ρпрям;
Метрическая резьба α = 60°; ƒ’мет =1.15ƒ; ρ’мет >ρ’трап> ρ’прям;
η = ηmax - прямоугольная резьба (силовые механизмы)
η = ηmin - метрическая резьба (кинематические механизмы)
Равенство η = ηmax справедливо при выполнении условия
 .
.
При
ведущей
гайке
выражение для η
имеет смысл
при γ
≥ ρ’;
если
γ < ρ’,
то проявляется свойство самоторможения.
Условие самоторможения быстрее наступает
в метрической резьбе.

Зазоры по сопрягаемым поверхностям винта и гайки приводят к появлению мертвого хода ∆γ:
 ,
,
 ,
,
где ∆Soc - осевая составляющая бокового зазора, ∆Sn - нормальная составляющая бокового зазора.
Для уменьшения мертвого хода точные винтовые передачи снабжают устройствами, производящими выборку бокового зазора радиального и осевого смещения витков гайки относительно винта.
При одинаковом значении нормальной составляющей бокового зазора радиальные составляющие бокового зазора равны:
- для метрической резьбы:
 ;
;
- для трапецеидальной резьбы:
 ;
;
Осевые составляющие бокового зазора равны, соответственно:

Радиальный способ выборки зазора нужно применять для метрических резьб, а осевой способ – для трапецеидальных. В прямоугольных резьбах зазор имеет только осевую составляющую (только осевой метод).