

30.3. Расчёт функционального потенциометра.
Исходными являются зависимости U = f(l) или U = f(φ).
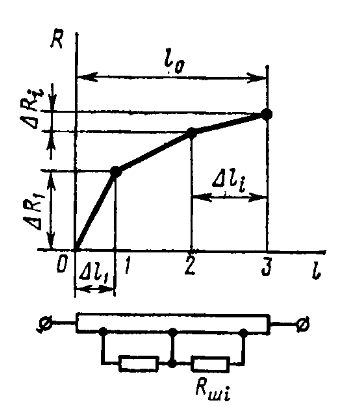
Если можно характеристику аппроксимировать ломаной линией, применяют шунтирование линейного потенциометра. Места изломов делят l на k участков.
Для участка с самым большим наклоном определенного параметра А. А = ΔR / Δl – этот участок остаётся без шунта. Остальные участки шунтируются.
Для потенциометра с профилированным каркасом
H – высота каркаса, l – ширина.
Подключение шунта наиболее эффективно в точке α = 0,74. Шунт должен иметь сопротивление Rш = 0,31Rн, при этом δн max = 2/k %, при k ≥ 10. При Rн =∞,
При Rн ≠∞,

где α = R1 / Ro; k = Rн/Ro.
Погрешность Δн от нагрузки равна
Δн тем больше, чем меньше k, следовательно k необходимо увеличивать. Можно осуществить это за счёт уменьшения Rо.
Для устранения влияния нагрузки линейный потенциометр проектируют как функциональный. Кроме того, можно применять схемы с дополнительным сопротивлением или с шунтом.
Таким образом, действительная мощность зависит от схемы включения и положения движка в схеме с Rg
Где Rд – ограничивает диапазон потенциометра
при

Pном находится в пределах 0,1 ÷ 10 Вт;
При Rн=0,5 Rд , δн массы = 3,2/k % при k≥10, что в 4 раза меньше.

Рис.30.2.
Лекция №31 Кулачковые механизмы
31.1. Основные сведения
Кулачковая передача состоит из кулачка и толкателя. Более часто ведущим кинематическим звеном кулачковой передачи является кулачок. Кулачковые передачи преобразуют движение кулачка в поступательное движение или качание толкателя. Кулачковые передачи находят широкое применение в приборных устройствах и машинах, в различных автоматических, счетно-решающих, распределительных устройствах двигателей и станков-автоматов. Операционные кулачковые передачи используют для зажима деталей, возврата стрелок шкальных приборов на ноль, замыкания электрических контактов в электрических переключателях и при обработке деталей по копиру, фиксации взаимного положения деталей и узлов. Функциональная кулачковая передача служит для воспроизведения заданной функции. Большинство функциональных передач позволяет осуществить зависимость у = f (х). Перемещение кулачка, как и перемещение толкателя, может быть или линейным, или угловым.
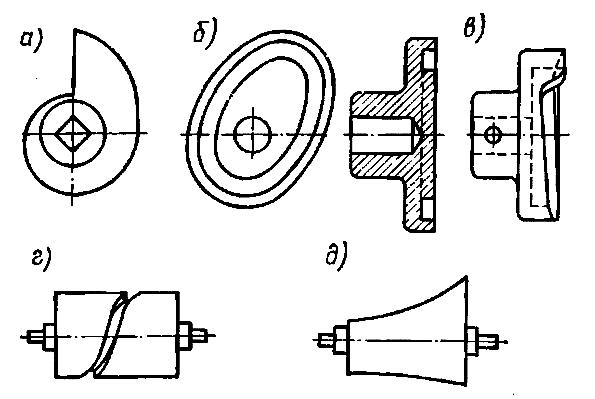
рис. 31.1
На рис. 31.1 показаны некоторые конструкции кулачков, которые применяются наиболее часто; а — плоский дисковый кулачок, б— торцовый кулачок с канавкой, в — торцовый кулачок без канавки, г — цилиндрический кулачок с канавкой, д — коноид. Кулачковый механизм с коноидом позволяет осуществить зависимость z = f (х, y), где х пропорционально углу поворота коноида, у пропорционально перемещению коноида вдоль оси его вращения, z пропорционально перемещению толкателя. Радиус-вектор коноида изменяется не только при его вращении, но и при перемещении вдоль оси вращения.
рис. 31.2
Заостренные толкатели (рис. 31.2, а, д) применяют только при небольших усилиях. Практически конец заостренного толкателя всегда имеет небольшое закругление. Часто используют толкатели, у которых имеется значительный радиус закругления конца (рис. 31.2, г, з), а также плоские толкатели (рис. 31.2, в, ж). Плоский толкатель работает с выпуклым кулачком. При роликовых толкателях между кулачком и толкателем действует трение качения (рис. 31.2, б, е). Благодаря этому уменьшаются трение и износ. Толкатели на рис. 31.2, а...г двигаются поступательно, а толкатели на рис. 31.2, д...з поворачиваются.

рис. 31.3
На рис. 31.3, а, б показано крепление роликов с подшипниками скольжения, на рис. 31.3, в, г — крепление роликов с подшипниками качения. Когда толкатель находится во взаимодействии с коноидом, то его конец имеет сферическую форму (рис. 31.3, д, е). Толкатель на рис. 8.3, д скользит по коноиду, а толкатель на рис. 31.3, е закреплен на подшипниках качения.
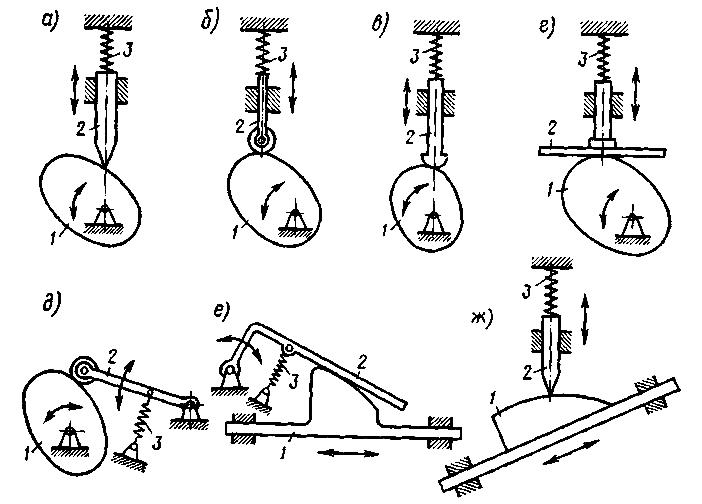
рис. 31.4
Кулачковые передачи могут иметь силовое или кинематическое замыкание. При силовом замыкании толкатель прижимается к кулачку пружиной. На рис. 31.4, а - ж представлены различные вариации кулачковых механизмов с силовым замыканием, где обозначены:
1 — кулачок, 2 — толкатель, 3 — пружина.
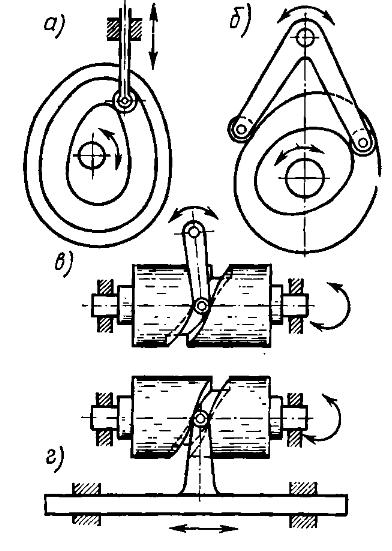
рис. 31.5
При кинематическом замыкании кулачкового механизма отпадает необходимость в пружине. Схемы кулачковых механизмов с кинематическим замыканием кинематической цепи показаны на рис. 31.5. При повороте торцового кулачка с канавкой (рис. 31.5, а) роликовый толкатель перемещается вверх или вниз вдоль своей направляющей, а ролик не выходит из канавки кулачка. Двойной дисковый кулачок (рис. 31.5, б) поворачивается относительно своей оси, вызывая угловое перемещение толкателя-коромысла. Ролики коромысла непрерывно касаются каждый своего кулачка. Поэтому профили обоих кулачков должны соответствовать один другому, что обеспечивается их построением. Хотя каждый из дисковых кулачков вместе со своим роликом составляет кулачковый механизм, требующий силового замыкания кинематической цепи, но их одновременное действие создает надежное кинематическое замыкание. При повороте цилиндрического кулачка с канавкой толкатель либо поворачивается (рис. 31.5, в), либо перемещается поступательно вдоль направляющей (рис. 31.5, г).