

24.1. Скорость скольжения профилей зубьев в червячной передаче
В червячной паре окружные скорости червяка и червячного колеса, в соответствии с особенностями конструкции не совпадают и направлены под углом 90° друг к другу. В относительном движении делительные цилиндры не обкатываются, а скользят относительно друг друга.
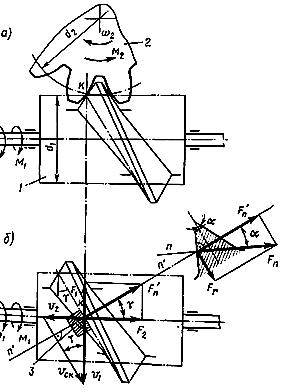
Рассматривая случай, когда червяк является ведущим, принимаем, что частота вращения n или угловая скорость ω и окружная скорость V известны.
Тогда:
V2 = V1 tgγ ;
 ;
;
d2 = m∙ z2 ;
d1 = q∙ m.
Окончательно
имеем:

Передаточное
отношение червячной передачи i12
может иметь очень большие значения;
например, если червяк имеет один заход
i12
численно равно числу зубьев колеса. В
силовых червячных передачах i12
= (10..60).
В кинематических передачах i12 300.
300.
При относительно небольших углах подъема γ = (20°..25°) скорость скольжения приблизительно равна окружной скорости червяка, Vcк ≈ V1 что приводит к большим потерям передаваемого момента и снижению КПД. Это является основным недостатком червячной передачи.
24.2. Усилия в зацеплении червячной передачи
Рассмотрим случай, когда ведущим является червяк, а ведомым является колесо.
Считаем, что известны передаточное отношения и размеры. Требуется определить момент М1 на валу червяка, необходимый для преодоления момента нагрузки М2 на валу колеса и сил трения.
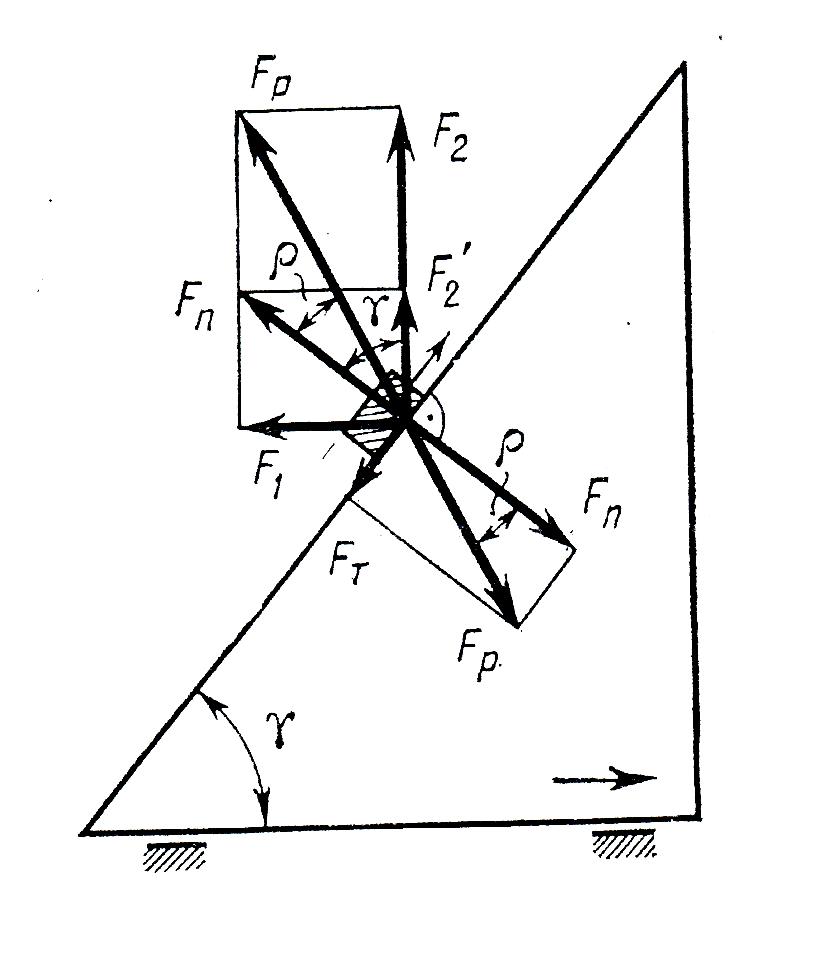
Движение зуба колеса по витку червяка это перемещение по наклонной плоскости, расположенной под углом γ к горизонтали. Будем считать, что сила F2 известна, так как известны момент нагрузки М2 и диаметр d2.
Рассмотрим силы, действующие на виток червяка со стороны зуба колеса, в соответствии с обозначениями рис. 16.3:
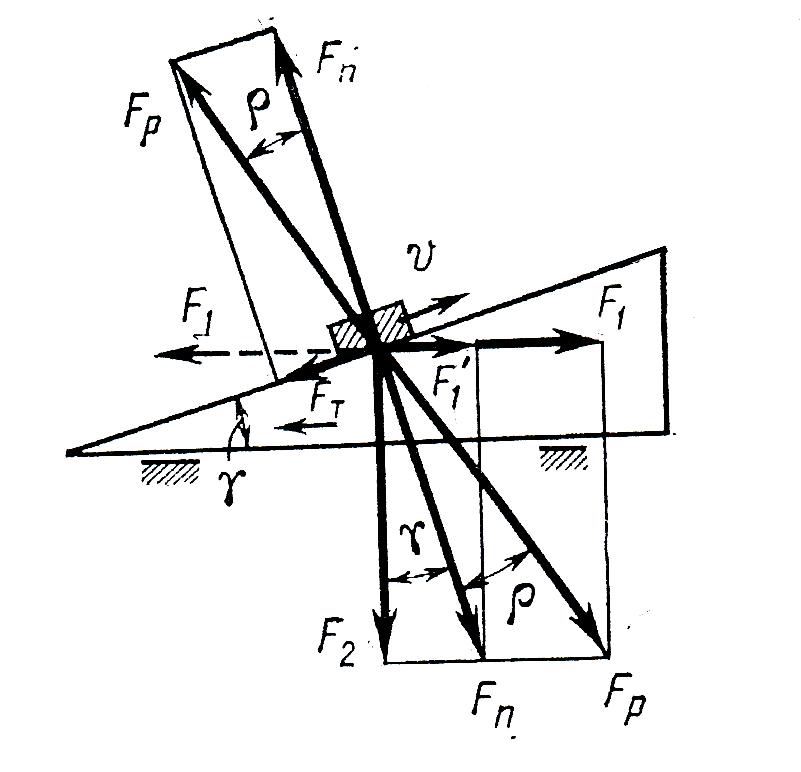
При отсутствии движения (и соответственно трения) сила F2 уравновешивается
силой F'1: F'1 = F2tgγ .
При движении зуба колеса относительно витка червяка возникает сила трения FТР, отклоняющая проекцию Fn на угол трения ρ. Для преодоления силы трения силу F'1 необходимо увеличить до значения: F1 = F2 tg (γ+ρ);
Следовательно, чем больше угол трения ρ, тем больше требуется сила F1, и соответственно, больше требуется момент на валу червяка:
 .
.
Таким образом, окончательно:
 ,
,
 .
.
Рассмотрим случай, когда ведущим является колесо, а ведомым червяк.
Момент нагрузки на валу червяка M1 известен. Необходимо определить формулу для расчета момента M2 червячного колеса.
Тогда:
 ,
,
Следовательно, при γ=ρ передача невозможна. Это условие отсутствия передачи, определяемое γ и ρ, называется самоторможением. Чтобы движение стало возможным, нужно чтобы выполнялось условие: γ > ρ. При γ=ρ момент на М2 червяка стремится к бесконечности. Определим значение момента М2, необходимое для преодоления момента нагрузки и сил трения:
Окончательно получаем выражение для определения КПД при ведущем колесе:
Достоинства: плавность хода, бесшумность, возможность исключения обратной передачи вращения.
Недостатки: низкий КПД из-за больших потерь на трение в зацеплении; необходимость использовать дорогие антифрикационные материалы.
Червяки изготавливают из сталей высокой твердости.
Для червячных колес используют бронзы
БрАЖ 9-40; БрАЖН10-4-4-Л; БрОФ10-1.