

11.3 Момент трения подшипников скольжения
11.3.1 Расчет радиального момента трения.
При определении момента трения Мтр в подшипнике скольжения под действием радиальной силы предполагается, что режим работы является установившимся (М = const и ω = сonst). При наличии зазора между цапфой и втулкой цапфа вкатывается по поверхности отверстия в направлении противоположном вращению вала, то есть поворачивается относительно исходного положения на величину угла трения ρ.
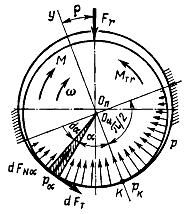
Для неприработанных опор момент трения равен:
 ,
,
где
 - приведенный коэффициент трения;
- приведенный коэффициент трения;
Введем
обозначение:
 ,
,
а) ξ = 1,57 – для неприработанных опор (на цапфе и втулке существуют неровности, создающие эффект торможения);
б) ξ = 1,27 – для приработанных опор;
в) ξ = 1 – для опор с большим радиальным зазором.
11.3.2 Расчет осевого момента трения
При определении момента трения опоры от осевой нагрузки Fa, воспринимаемой кольцевой пятой, предполагаем распределенным равномерно давление по всей ширине кольца с диаметрами d1 и d. На пяте выделяем кольцевую зону с текущим радиусом ρ шириной dρ.
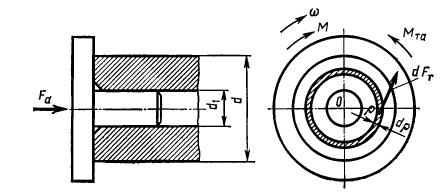
Момент трения на кольцевой пяте равен:
Для сплошной пяты d1 = 0, тогда

Лекция № 12
12.1 Механические передачи.
Механизмы, предназначенные для передачи и преобразования энергии, моментов, сил, перемещений, скоростей от ведущего элемента к ведомому называются передачами. Большинство приборных устройств представляют собой комплексы, в которых сочетаются электрические, пневматические, оптические и прочие измерительные цепи с передаточными механизмами.
К конструкциям передаточных механизмов предъявляются следующие требования:
- заданной точности преобразования движения;
- достаточной прочности и жесткости элементов механизма при передаче усилий или моментов;
- высокого коэффициента полезного действия (КПД);
- простоты и надежности регулировки;
- малой чувствительности к колебаниям температуры и динамическим нагрузкам;
- технологичности конструкции, минимизации габаритов и стоимости изготовления.
При разработке конструкции передаточного механизма конструктор-проектировщик должен искать компромиссные решения сбалансированного соотношения перечисленных требований.
12.2 Классификация по признакам
Все элементарные передаточные механизмы можно классифицировать по ряду признаков.
К ним относятся конструктивный и кинематический признаки, признаки по виду преобразования движения, по преобразованию скорости и по принципу действия.
По конструктивному признаку - зубчатые, червячные, винтовые, с гибкими звеньями, фрикционные, рычажные, кулачковые и прерывистого движения.
По виду преобразования движений:
- вращательного во вращательное (зубчатые, червячные, кулачковые с качающимся роликом);
- вращательного в поступательное (реечная, винтовая, кулачковая с поступательно движущимся толкателем, кривошипно- шатунная передачи);
- поступательного во вращательное (реечная, синусная и тангенсная передачи);
- поступательное в поступательное (двойные синусная и тангенсная передачи).
По преобразованию скорости движения:
- с постоянным отношением скоростей (зубчатая, фрикционная, червячная передачи);
- с переменным отношением скоростей (вариаторы).
Передачи с переменным отношением скоростей одно из звеньев находится в равномерном движении, а другое подчиняется заданному закону. К этой же группе относятся также передачи прерывистого движения (храповая передача, передача с мальтийским крестом).
В зависимости от назначения и условий работы передачи делят на силовые и кинематические.
Силовые передачи передают значительные мощности, работают в условиях значительных скоростей, динамических нагрузок и при экстремальных условиях эксплуатации. Для них основными расчётами являются расчёты на прочность. Расчёт производят по условию обеспечения заданной мощности. Кроме того, к ним предъявляются требования по надёжности, долговечности и заданной точности.
Кинематические передачи имеют малую нагрузку, к ним предъявляются требования по точности, быстродействию и габаритам.
В зависимости от принципа действия передачи делятся на передачи трением и передачи зацеплением.
Передачи трением делятся на фрикционные передачи посредством взаимодействия твёрдых тел (шкивы, диски, валики, сферические и конические поверхности) и передачи гибкими связями, содержащие промежуточные элементы, осуществляющие гибкую связь (ремень, шнур, пассик).
Передачи зацеплением – зубчатые и червячные.
Кроме того, существуют передачи, использующие как трение, так и зацепление: цепные, тросиковые, передачи зубчатым ремнём.
К передачам также относятся устройства, в которых гибкие связи жёстко соединены со шкивами, а также рычажно-шарнирные, кулачковые, поводковые передачи.
Проектирование передач начинают с разработки кинематических схем, которые дают представление как о принципе работы данной передачи, так и о ее конструкции. Условное изображение передачи на кинематических схемах допускают плоское или пространственное изображение этих передач в соответствии с ГОСТ.
12.3. Кинематические характеристики передач Кинематические исследования передач проводят для оценки кинематических характеристик и последующего решения задач динамики. Цель такого исследования – изучение движения звеньев механизмов независимо от действующих сил. При этом определяют положение элементов передачи, линейные и угловые скорости, передаточные отношения. Исходными данными служат размеры конструкции элементов.
В передачах, в которых вращательное движение преобразуется во вращательное, передаточным отношением i называется отношение угловых скоростей ведущего и ведомого звеньев передачи. Его записывают с индексацией, показывающей, в каком направлении происходит движение:
i12 = n1/n2 = - для редуктора;
i21 = n2/n1 = 21 – для мультипликатора.
Передаточное отношение, определяемое отношением угловых скоростей, - величина безразмерная. В случае, когда передача движения сопровождается изменением его вида, например, поступательного во вращательное или наоборот, передаточное отношение является величиной размерной.
Передаточное отношение может быть постоянным или переменным.
В общем случае передаточное отношение выражают через отношение частных производных от перемещения по обобщённой координате:
 .
.
Это позволяет заменить отношение скоростей отношением соответствующих перемещений.