

Teoriya avtomatichnogo keruvannya
.pdfГлава З |
МАТЕМАТИЧНЕ ОПИСАННЯ ЛІНІЙНИХ НЕПЕРЕРВНИХ СИСТЕМ |
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
Користуючись формулою рівняння розімкнутої системи, маючи на увазі, що вихідною величиною є А/7Г, а вхідною ДІ/е м , дістанемо рівняння розімкнутої на виході об'єкта системи у вигляді
(Тгр+\)(Тяр+ |
\)рАЦг |
= кгк ш к ке/с яАІІем, |
де кгкемкКекя = /ср — коефіцієнт передачі розімкнутої системи. Розкриваючи дужки, дістанемо рівняння даної розімкнутої сис-
теми:
[Ггту + (Тг + Гд )р2 + />]А£/г = крАЦШ. |
(3.75) |
Рівняння замкнутої системи. Для знаходження рівняння замкну-
тої системи необхідно врахувати, що вихідна величина генератора, точніше її відхилення А 1/г, подається на вхід електромагніта, а замикання системи автоматичного регулювання відбувається за допомогою від'ємного зворотного зв'язку, тому можна записати
Треба врахувати також дію збурення на об'єкт керування при передаточному операторі об'єкта за збуренням 5(р). Тоді система рівнянь елементів для замкнутої системи
( 7 |
> + |
1)А(/Г |
= |
кгАІ/3 + 5(р)/(і)\ |
( 7 |
> + |
1 )рАх |
= |
ккеАРш; |
Д(У, |
= кяАх. |
|
|
|
Розв'язуючи систему (3.76) відносно А£/г, дістаємо рівняння замкнутої системи. Але в даному разі скористаємося раніше знайденою формулою рівняння системи стабілізації, згідно з якою
[Р(Р)+О(Р)]аі/г = р{(р)5(р)т,
де Р(р) = (Т{ р + 1 ) ( 7 > + 1); 0(р) = кгкемкКекК; Р{ (р) = (Тдр + 1 )р.
Враховуючи викладене, рівняння даної замкнутої системи автоматичної стабілізації напруги генератора постійного струму записуємо у вигляді
1(7;/,+ 1)(7>+ \)р + /ср ]Д£/Г = ( 7 > + І )р5{р)/{1). |
(3.77) |
Рівняння незбуреннх коливань у даному разі
130
3.9. Приклад знаходження рівняння динаміки системи стабілізації напруги генератора постійного струму
[(ТГр+ |
1 ) ( 7 > + \)р + кр]А[/Г |
= 0, |
( 3 . 7 8 ) |
і характеристичне рівняння замкнутої системи |
|
||
( 7 > + 1)(7>+ \)р + кр |
= 0 |
|
|
іОю |
|
|
|
Т<т,у |
+ (Г, +Тя)р2 +р+ кр |
= 0. |
(3.79) |
Дістанемо рівняння (3.77)—(3.79) за допомогою теореми Крамера. У системі рівнянь (3.76) зробимо такі перетворення, щоб у правій
іастині залишились тільки збурення або нулі:
(7>+1)Д£/г |
- £ Г Д£ / 3 =5Х/>)Дґ); |
|
|||
|
+*е„Л£/г |
= 0; |
(3.80) |
||
( 7 > + І)/;Дх - /скеД7-см =0; |
|||||
|
|||||
Аі/, |
кКАх |
- |
0. |
|
|
Рівняння даної системи автоматичного регулювання за Краме- |
|||||
ром |
|
|
|
|
|
|
Лд иг |
= V |
|
||
Знайдемо головний |
визначник (детермінант) Д та приєднаний |
||||
АК. Згідно з системою рівнянь (3. 80) запишемо стовпці, що відпо-
відають змінним |
Аі/Г, А А Р е н , |
Дх, у такій |
послідовності: |
||||
|
|
~Тгр+ 1 |
-кг |
0 |
|
0 |
|
|
|
кем |
0 |
1 |
|
0 |
|
|
|
0 |
0 |
-кКе |
р(Тлр+ |
1) |
|
|
|
0 |
1 |
0 |
-к |
К |
|
Замінивши |
перший стовпець, |
що відповідає регульованій вели- |
|||||
ч и н і системи |
АІІГ, |
правими частинами рівнянь ланок системи (3.80), |
|||||
дістанемо |
|
|
|
|
|
|
|
|
|
3(Р)/(Г) |
- к |
0 |
|
о |
|
|
|
0 |
о |
1 |
|
о |
|
|
|
0 |
0 |
•^ке |
Р(ТЛР+ |
1) |
|
|
|
0 |
1 |
о |
- к я |
|
|
О б ч и с л и м о в и з н а ч н и к и А та А к •
Розклавши визначник А за елементами першого рядка, одержимо
131
Глава З |
МАТЕМАТИЧНЕ ОПИСАННЯ ЛІНІЙНИХ НЕПЕРЕРВНИХ СИСТЕМ |
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
0 |
1 |
0 |
м |
1 |
|
0 |
А = ( 7 > + 1) 0 |
-кк |
р(тар+1) |
0 |
-ка |
р(т |
р+ 1) |
кг |
|
|
а |
|
||
1 |
0 |
— к» |
0 |
0 |
— к о |
|
Застосовуючи правило Сюрреля, згідно з яким дописуються два перші стовпці до визначника третього порядку і перемножуються члени вгору по діагоналі зі знаком «плюс», а вниз — зі знаком «мінус», дістанемо
|
|
0 |
1 |
о |
|
0 |
|
|
1 |
|
|
А = ( 7 > + |
1) |
0 |
-кК |
р(Тар+ |
1) |
0 |
-кке |
+ |
|
||
|
|
І |
о |
|
|
1 |
|
|
о |
|
|
|
|
І |
|
о |
К м |
1 |
|
|
|
|
|
+ к, 0 |
|
-кК |
Р(ТЛР+ 1) |
0 |
|
|
= |
|
|
||
0 |
|
о |
|
|
о |
о |
|
|
|
||
= (Тгр+ 1 )(Тяр+ \)р + кгкемкКекК |
= ТгТар |
,3 |
, ( Т |
+ |
, |
Т |
\ „ 2 |
+ р + кр. |
|||
+ (Тт |
|
Тд )р |
|||||||||
Розкриваючи аналогічним чином визначник Ак, маємо |
|||||||||||
|
1 |
|
|
0 |
|
0 |
1 |
|
|
о |
|
А, = 8(р)Г(і) |
•кК |
р(Тар+ 1) + кг |
о |
-к„ |
Тлр+ 1 |
||||||
|
0 |
|
|
|
|
0 |
о |
|
— к п |
||
=$(р)ШТдр+\)р.
Як бачимо, рівняння замкнутої системи за Крамером має той самий вигляд, що й знайдене раніше.
3.10
Рівняння і передаточні функції автоматичних слідНувальних (програмних) систем
Зточки зору методики знаходження рівнянь і відповідних передаточних функцій слідкувальна і програмна системи повністю схожі. Відмінність полягає лише в способі
формування задаючого сигналу у(і). (Як відомо, в програмній системі він обчислюється заздалегідь, а в слідкувальній формується в ході
132

3.10. Рівняння і передаточні функції автоматичних слідку вальних (програмних) систем
роботи системи залежно від стану об'єкта.) У зв'язку з цим функціоііа/м.ма схема і рівняння відповідних ланок обох систем будуть однаковими. Тому все, що стосуватиметься слідкувальних систем, має таке саме відношення і до програмних систем автоматичного регулювання.
С прощену функціональну схему слідкувальної системи показано па рис. 3.30, де 1 — об'єкт регулювання, який має змінювати свою вихідну величину х1шіх згідно зі зміною задаючої величини (програми) у(ї)\ 2 — пристрій зворотного зв'язку (в програмних системах його називають чутливим елементом), який контролює вихідну величину об'єкта; ДР — датчик розбіжності, який порівнює задану величину з величиною, пропорційною вихідній величині об'єкта; х — величина розбіжності між заданою і дійсною величинами (точніше, величиною, пропорційною заданій).
Рис. 3.30
Запишемо рівняння об'єкта та інших ланок системи в загальному вигляді:
\Р\ (р)х,вих |
= 0{ |
(Р)хтт + 5, (р)Ж |
(1) |
|
|
Р2 |
(р)х2 вих |
|
ВИХ ' |
(2) |
|
|
х = у(()-х2ит; |
(2') |
(3.81) |
||
Р3(Р)Х Звих |
= О з (Р)х; |
( 3 ) |
|
||
РтІР)Хт вих |
= |
0,ЛР)*П,-Ч |
(т) |
|
|
до Л', (/;) — передаточний коефіцієнт (поліном) об'єкта за збуренням;
/'(/>), ..., Рт{р) І <2\(р), •••, 0,„(р) — поліноми від р відповідно лівих і праних частин рівнянь ланок системи.
Розв'язуючи систему рівнянь (2) та (2'), з рівняння (2) знаходимо
Л 2 вих |
п , 4 ^ 1 вих • |
|
Р2(р) |
133

Г л а ва 3 МАТЕМАТИЧНЕ ОПИСАННЯ ЛІНІЙНИХ НЕПЕРЕРВНИХ СИСТЕМ АВТОМАТИЧНОГО КЕРУВАННЯ
Підставивши його в рівняння (2'), дістанемо
ОЛР)
Р2(рУ
ЗВІДКИ
Р2 (р)х = Р2 (р)у(ї) - 02(р)х{ в и х . |
( 2 ) - ( 2 ' ) |
Розглядаючи ланки з третьої по т-ну як деяку розімкнуту систему, згідно зі знайденим вище рівнянням розімкнутої системи, маючи на увазі, що вихідною величиною цієї системи є хшвих, а вхідною х, матимемо
Р3(р)Р4(р)-.-Рт(рУхтт |
=03ШЛр)-.От(р)х. |
Замінивши добутки поліномів від р лівої і правої частин відповідно величинами Рт(р) і 0ш(р), дістанемо рівняння, що відповідає ланкам з третьої по т-ну:
Р\\і (Р)хт вих = 0 Ш {р)х. |
(З )-(т) |
Розв'язуючи систему рівнянь об'єкта (1) та рівнянь (2)—(2') і
(3)—(т) відносно Рі(р)хттх9 матимемо
РШ(Р)
ОШ(Р) * « вих •
Підставляючи це значення х у рівняння (2)—(2'), після деяких перетворень дістаємо
|
= |
Р2(р)у(г)-02(р)х |
х, |
|
|
Ош(р) |
|
|
|
звідки |
|
|
|
|
|
< 2 М Л ) ( л |
Ог(Р) О т І Р ) г |
|
|
' |
:У\1) |
гл / ч |
— ЛІВИХ- |
|
Рш(Р) |
Р2(Р) |
Рт(Р) |
|
|
П о з н а ч и в ш и |
Р2(р)Рш(р) = Рх(р), |
а 02(р)0ш(р)= |
<2х{р), де Р{(р) і |
|
(2, (/?)— відповідно добутки поліномів від р лівих і правих частин рівнянь усіх ланок, окрім об'єкта, матимемо
Рш(р) |
РЛР) '""х" |
Підставивши це значення хткт у рівняння об'єкта, дістанемо
134
3.10. Рівняння і передаточні функції автоматичних |
|
||
слідку вальних (програмних) |
систем |
|
|
Р\ (Р)х, тх = О, (Р) я м |
У |
п - т Х і ш і |
+ ЗД/Х О- |
Ап(Р) |
РЛР) |
|
|
Після деяких перетворень дістанемо рівняння динаміки замкну- |
|||
ті слідку вальної (програмної) |
системи у вигляді |
|
|
[Р(р)+ 0ІР)]Х{ вих = б п |
(Р)Р2 (Р)У(<) + Рх |
( 3 . 8 2 ) |
|
де /Ч/^), (?(/?) — добутки поліномів від р, що стоять відповідно у лівих і правих частинах рівнянь усіх ланок; 0 и ( р ) - 0 \ ( р ) 0 т ( р ) — добуток поліномів від р правих частин рівнянь усіх ланок, окрім полінома правої частини рівняння ланки зворотного зв'язку 02(р); Р\(р) = і\(р)... Рт(р) — поліном без урахування відповідного оператора об'єкта; Р2(р) — поліном лівої частини рівняння ланки зворотного
зв'язку.
Порівнюючи рівняння замкнутої системи стабілізації з рівнянням (3.82), можна дійти висновку, що вони відрізняються лише наявністю в правій частині рівняння (3.82) члена ()и(р)Р2(р)у(і).
Передаточні функції слідкувальних (програмних) систем. Розділив-
шії в рівнянні слідкувальної системи праву і ліву частини на величи-
11У Р(р) + (2(р), дістанемо
|ш,х |
Р(Р) + 0(РУУ' |
Р(Р) + 0(РҐ |
' |
Розділивши чисельник і знаменник обох складових правої частини виразу на Р(р), матимемо
,оих |
х |
Ш |
| |
Оір) |
|
|
Р(р) |
|
Р(р) |
Рівняння слідкувальної системи через передаточні функції матиме вигляд
|
|
|
І + №(р) |
1 |
(3.83, |
|
|
|
+ Іг(р) |
||
IV |
|
(/;) |
передаточна |
функція |
за завданням; Ж„(/?) = |
/іе |
11 |
— — |
|||
І і |
\У(р) |
|
|
|
|
Он (р)/Р\\(р) — |
передаточна функція всіх ланок системи без ураху- |
||||
135
Г л а в а 3 |
МАТЕМАТИЧНЕ ОПИСАННЯ ЛІНІЙНИХ НЕПЕРЕРВНИХ СИСТЕМ |
|||
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
|
|
|
|
\¥ |
|
|
|
вання ланки |
г |
(р) |
= Ц/Г(р) — передаточна |
|
зворотного зв'язку; — |
IV (р) |
|||
|
1 + |
|
||
функція за збуренням; IV/ (р)— передаточна функція об'єкта за збуренням; IV (р) — передаточна функція розімкнутої системи.
З урахуванням викладеного рівняння слідкувальної (програмної) системи через передаточні функції за завданням і збуренням можна записати так:
*,„„х |
(Р)т. |
(з.84) |
Рівняння, записане у відхиленнях регульованої величини від заданого значення, часто називають рівнянням помилки (похибки). Воно має аналогічний вигляд
Ах1цих = ^у(р)у(і)+^/(р)Ді). |
(3.85) |
|
Якщо елемент зворотного зв'язку безінерційний, |
ТО Є>2(р) = |
|
= Р2(р) = 1 і передаточна функція за завданням |
|
|
ІУу(р)= |
. |
(3.86) |
у У |
1 + ИУ(р) |
|
Передаточна функція за збуренням залишиться, очевидно, без змін.
3.11
Приклад знаходження рівняння динаміки слідкувальної системи
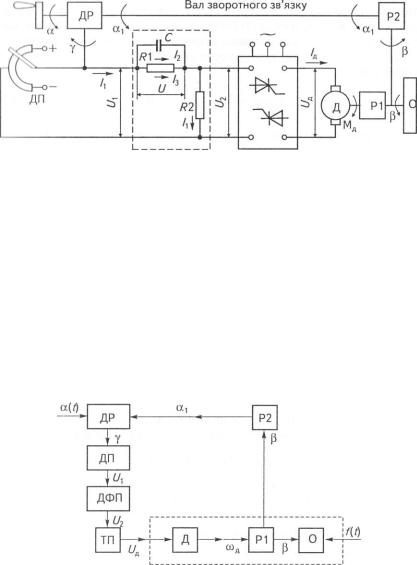
Як приклад розглянемо спрощену принципову схему, наведену на рис. 3.31, де ЗП — задаючий пристрій, який обертається за деяким повільним законом а =а(/). Цей
закон повинен відтворюватись у заданому масштабі на об'єкті О у вигляді к0 =а(і) (к0 — коефіцієнт пропорційності об'єкта керування); ДР — датчик розузгодження (у даному разі — механічний диференціал). На його вихідному валу відтворюється сигнал (розузгодження), який є різницею двох сигналів: заданого а і сигналу зворотного зв'язку а 1 .
136
3.11. Приклад знаходження рівняння динаміки слідкувальної системи
ЗП
ДФП |
ТП |
Рис. 3.31 |
|
Механічний вал зворотного зв'язку гіри необхідності можна замінити на електричний вал за допомогою сельсинів. Сигнал розузгодження за допомогою потенціометричного датчика ДП перетворюється в напругу розузгодження £/,. Елементи /?/, К2, С представляють диференціювальний пристрій ДФП, який використовується для поліпшення динамічних характеристик системи керування. Його вихідна напруга СІ2 після підсилення тиристорним перетворювачем III у вигляді напруги 1/л подається до якірного кола двигуна Д, який через редуктор Р1 обертає об'єкт О.
Функціональну схему цієї системи показано на рис. 3.32, де /'(/) — збурення, що діє на об'єкт і визначає навантаження двигуна.
Рис. 3.32
137
Г л а в а 3 МАТЕМАТИЧНЕ ОПИСАННЯ ЛІНІЙНИХ НЕПЕРЕРВНИХ СИСТЕМ АВТОМАТИЧНОГО КЕРУВАННЯ
Виведемо рівняння всіх ланок системи. Враховуючи, що об'єкт у даному разі можна розглядати як деяку механічну масу, яка разом із редуктором обертається двигуном, розглядатимемо об'єкт як одне ціле — у вигляді ланки системи з приведеним моментом інерції У.
Рівняння ланки двигун—редуктор—об'єкт, або умовно «об'єкт», матиме вигляд
/ ^ = М Д - М т р - М / , |
(3.87) |
сіі2 |
|
де МА — рушійний момент двигуна; Мтр — момент тертя; Му — момент, зумовлений дією зовнішніх сил /(/); р —кут повороту вала двигуна.
У даному разі при сталій величині потоку в магнітній системі двигуна Ф
м а = с Ф ^ я =с,£ / д ,
де ЇУД — напруга на якорі двигуна; с{ — коефіцієнт пропорційності. Враховуючи, що момент тертя залежить від швидкості обертання,
можна записати
ф
де с2 — коефіцієнт пропорційності.
Підставивши значення Ма , Мтр у вихідне рівняння, дістанемо
ГС/2Р |
ТІ |
Ф |
АЖ |
/А |
|
де Мн(і)— момент збурення зовнішніх сил. |
|
|
|||
Після нескладних перетворень в операторній формі маємо |
|
||||
( Т і / |
+ /?)р = кя ІІя |
- / ( 0 , |
(3.88) |
||
де |
|
|
|
|
|
7] = — ; |
|
= — ; т - |
^ . |
|
|
с2 |
|
с2 |
|
с2 |
|
Запишемо рівняння окремих ланок: |
|
|
|
||
• зворотного зв'язку |
|
|
|
|
|
|
а і |
= у- Р і > |
|
|
(3-89) |
138
3 . 1 1 . Приклад знаходження рівняння динаміки слідкувальної системи
• |
датчика |
розузгодження |
(ДР) |
|
|
|
|
|||
|
|
|
|
|
у =<х(0-<х1, |
|
(3.90) |
|||
• |
ііотенціометричного датчика |
порівняння |
(ДП) |
|||||||
|
|
|
|
|
|
= |
к2у, |
|
|
|
де І< 2 — коефіцієнт пропорційності. |
|
|
||||||||
Рівняння |
диференціювального |
|
пристрою (ДФП), згідно з |
|||||||
рис. 3.31, |
має вигляд |
|
|
|
|
|
|
|
||
|
|
/ , = / 2 + / 3 ; |
12 |
,сШ |
г |
І] |
|
17 = ^-1/2, |
||
|
|
— С > |
|
Із=і~; |
||||||
|
|
|
|
|
|
аі |
|
К\ |
|
|
ІВІДКИ |
|
|
</«/, |
- Ц 2 ) |
|
Ц 1 - Ц 2 _ Ц 2 |
||||
|
|
|
|
|
||||||
|
|
|
1 |
|
сії |
|
Я, |
|
К2 |
|
аГх) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сії |
|
СІІ |
|
Я, |
|
К2 |
Після |
нескладних перетворень дістанемо |
|
||||||||
|
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
— |
+ |
— |
|
2 |
СІІ |
К{ |
|
|
|
СІІ |
|
|
К2 у |
|
|||
|
|
|
|
|
|
|
||||
Розділивши всі члени рівняння на коефіцієнт при II2 , одержимо |
||||||||||
де |
|
|
|
(Т2Р+1)Ц2 =(*з +к'3р)Ц13 |
|
(3.91) |
||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
, |
|
|
_ |
К2 |
. |
І,' |
|
|
1 1 ' |
3 " д, + /?2 " я, + т?2 |
? |
3 |
|||||
|
|
|
+ |
|
|
|
|
|
|
|
Розглядаючи тиристорний підсилювач як ланку із запізненням, запишемо його рівняння у вигляді
І Іісля розкладу в степеневий ряд функції е~хр = (1 + тр)~1 = —-—,
1 + тр
діє іанемо
139