

Teoriya avtomatichnogo keruvannya
.pdfГлава З |
МАТЕМАТИЧНЕ ОПИСАННЯ ЛІНІЙНИХ НЕПЕРЕРВНИХ СИСТЕМ |
|
||
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
|
|
|
уУ(со) |
При к= 1 |
+20 дБ/дек |
|
|
|
|
|||
|
1 |
У |
т |
|
|
|
со = |
|
|
ш 2 = 1/Т
Рис. з гз
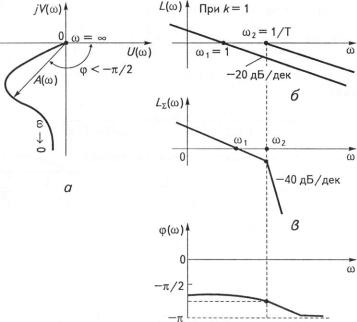
Отже, вона складається з трьох характеристик, які вже було розглянуто раніше. При к = 1
4 = 20 со - 20 1§/і + Г2 ш2 .
Ці окремі логарифмічні характеристики показано на рис. 3.23, в, а їх алгебрична сума — на рис. 3.23, г.
Логарифмічну фазочастотну характеристику ф(со) наведено на рис. 3.23, д.
Логарифмічні характеристики інерційної інтегрувальної ланки.
Інерційною інтегрувальною називають ланку, передаточна функція якої
ІУ(Р)= |
* |
п. |
(3.49) |
|
р(Тр + |
1) |
|
110
3.6.Логарифмічні частотні характеристики
їїамгілітудно-фазова частотна характеристика
/с |
Ід( 1 - у'Тсо) __ |
/сТсо + ]к |
усо (Т/со + 1) |
-со(1 + Г2 со2 ) |
со(1 + :Г2со2)' |
де дійсна частотна характеристика й уявна виражаються відповідно формулами
|
|
|
|
|
|
|
£/(ш) = |
кТ |
|
К(со) = |
к—~—т- • |
||
|
1 + Г |
со |
со(1 + Г со ) |
|||
Амплітудно-частотна характеристика |
має |
вигляд |
|
|
|
|||||||
|
|
|
|
|
к2Т2ю2 |
|
|
|
|
|
|
|
|
|
|
|
|
со2(Г2со2 |
+ І)2 |
со2 (Г2со2 |
+ І)2 |
||||
|
|
|
І / с 2 ( Г 2 с о 2 + 1) |
|
|
|
к |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
" |
I СО2 (Г20)2 |
+1)2 |
ол/^со2 |
+ 1 ' |
|
|
|
|||
а фазочастотна |
|
|
|
|
|
|
|
|
|
|
||
, ч |
, |
К(со) |
|
, со(Г2со2 +1) |
|
|
|
1 |
о п о |
|
, _ |
|
Ф (со) = |
а г с і е — Н = |
а г с і £ — - — — — - = агсІ§ — - - 90 |
- агсі§ Тсо. |
|||||||||
|
|
II (со) |
_ |
кі |
|
|
|
Тсо |
|
|
|
|
|
|
|
|
(1 + Г2 со2 ) |
|
|
|
|
|
|
|
|
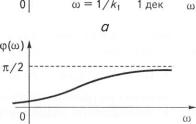
Відповідну амплітудно-фазову частотну характеристику показано |
||||||||||||
на рис. 3.24, |
а. |
|
|
|
|
|
|
|
|
|
|
|
Логарифмічна амплітудно-частотна характеристика цієї ланки = 20 1е Дсо)= 20 1е к - 2 0 1§ со - 20 І£ л/і + Г2со2
при к = 1 складається з двох характеристик, наведених на рис. 3.24, їх результуючу логарифмічну характеристику побудовано на рис. 3.24, в, а відповідну фазочастотну логарифмічну характеристику — на рис. 3.24, г.
Як бачимо, інерційність даної ланки збільшує відставання фази на величину, більшу за - 90°. При частотах, менших со= —, ця ланка
близька до ідеальної інтегрувальної ланки.
111
Глава З |
МАТЕМАТИЧНЕ ОПИСАННЯ ЛІНІЙНИХ НЕПЕРЕРВНИХ СИСТЕМ |
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
г
Рис. 324
Логарифмічні характеристики ідеальної безінерційної ланки при введенні похідної. Передаточна функція має вигляд
Щр) = к(\ + рк{),
де к— передаточний статичний коефіцієнт безінерційної ланки; к{ — передаточний коефіцієнт у рівнянні похідної.
Запишемо для цієї ланки характеристики: амплітудно-фазова
ЩМ = к(1 + ]ик{);
амплітудно-частотна
А = /сд/і + ^оо2;
фазочастотна
ф(оо) = агсі&к, со;
112
3.6. Логарифмічні частотні характеристики
логарифмічна амплітудно-частотна
4(со) = 20 1§ А(со) = 20 1§ к
Логарифмічна амплітудно-час- тотна характеристика при к = 1 показана на рис. 3.25, а, а логарифмічна фазочастотна характеристика — на рис. 3.25, б.
При низьких частотах (со < 1 //с,) ця ланка близька до ідеальної підсилювальної ланки, а при високих частотах (со> 1 /к{) — до ідеальної диференціювальної ланки. Випередження за фазою зростає зі збільшенням частоти.
Знаючи правила побудови логарифмічних характеристик окремих ланок, а також результуючих логарифмічних характеристик, можна побудувати характеристики для групи ланок.
+ 20 1§ ^І + к2^2.
со). При к= 1 |
+20 дБ/дек |
2 0 - |
|
Рис. 325
Побудова логарифмічних характеристик групи ланок.
Найчастіше виникає необхідність побудови логарифмічної характеристики розімкнутої системи. (Як буде показано далі, в ТАК є методи, за допомогою яких за виглядом частотних характеристик розімкнутої системи можна оцінювати динамічні властивості замкнутої системи.)
Відомо, що передаточна функція розімкнутої системи з п ланок (як передаточна функція групи послідовно з'єднаних ланок) є добутком передаточних функцій кожної з цих ланок:
Щр) = Щ (р) Ж2(р)... Ж » = П ^ (/>)•
І = 1
Аналогічний вигляд матиме і амплітудно-фазова частотна характеристика розімкнутої системи:
І = І
113
Глава З |
МАТЕМАТИЧНЕ ОПИСАННЯ ЛІНІЙНИХ НЕПЕРЕРВНИХ СИСТЕМ |
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
Як було показано раніше, при побудові результуючих частотних характеристик для групи послідовно з'єднаних ланок результуючий модуль (амплітудно-частотна характеристика розімкнутої системи) можна дістати як добуток модулів усіх ланок, а результуючу фазочастотну характеристику — як суму фазочастотних характеристик відповідних ланок.
Отже, можна записати
11 |
11 |
|
А(ю) = П АІ (а))' |
Ф М = X |
• |
/ = і |
/ = і |
|
Згідно з наведеними вище формулами при побудові логарифмічної амплітудно-частотної характеристики
Ц. (со) = 20 1§ ЛЕ (со) - 20 1§ , (со) + 20 1§ А 2 (со) + ... + 20 І£ Ап(со).
Загальна методика побудови результуючої характеристики полягає в знаходженні логарифмічної характеристики окремо кожної ланки з наступним додаванням ординат при відповідних частотах.
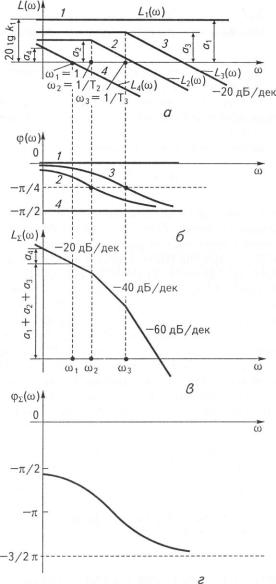
Як приклад розглянемо побудову логарифмічної амплітудно-час- тотної характеристики розімкнутої системи, що складається з чотирьох ланок з передаточними функціями:
• безінерційної підсилювальної \¥{ (р) = /с,;
• |
аперіодичної першого порядку \У2(р) = - — ( о б ' є к т керуван- |
|
|
|
1 + Т2р |
|
ня); |
|
• |
аперіодичної першого порядку И/3(р) = ———; |
|
|
|
1 + Т,р |
• |
інтегрувальної IV4 (р) = — (при к4 = 1 IV4 (р) = 1 /р). |
|
|
Р |
|
Відповідні логарифмічні |
амплітудно-частотні характеристики |
|
Ц (со), Ь2(од), £3(со), Ь4(со) були |
побудовані раніше (рис. 3.26, а, криві |
|
/, 2, 3, 4). На рис. 3.26, б наведено відповідні логарифмічні фазочастотні характеристики цих ланок ф2(со), ф3(со), ф4(оо) (для першої ланки ф] (со) = 0). Результуюча логарифмічна амплітудна характеристика всіх чотирьох ланок Ь^ (со) наведена на рис. 3.26, в, а результуюча логарифмічна фазочастотна характеристика фх(со)— на рис. 3.26, г.
114
3.6. Логарифмічні частотні характеристики
Рис. 326
115
Глава З |
МАТЕМАТИЧНЕ ОПИСАННЯ ЛІНІЙНИХ НЕПЕРЕРВНИХ СИСТЕМ |
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
3.7
Мінімальнота нємінімально-фазові ланки
ТГр "рім розглянутої раніше класифікації, в теорії авто- IVі^матичного керування ланки класифікують також залежно від вигляду, а точніше, від особливостей передаточних
функцій. Ця класифікація базується на поняттях нулів і полюсів передаточних функцій.
Якщо передаточну функцію записати у вигляді
и = Щ
Р(р)
то нулями передаточної функції називають корені рівняння ()(р) = 0, а полюсами — корені рівняння Р(р) = 0, де ()(р) і Р(р) — поліноми від р відповідно правих і лівих частин рівнянь динаміки.
Інакше, нулі — таке значення коренів чисельника передаточної функції, за яких передаточна функція IV(р) дорівнює нулю. Полюси — таке значення коренів знаменника передаточної функції, за яких вона перетворюється на нескінченність. Якщо всі нулі та полюси передаточної функції ланки мають від'ємні або рівні нулю дійсні частини, то така ланка називається мінімально-фазовою.
Немінімально-фазовою називають ланку, в якій серед нулів і полюсів є хоча б один, який має додатну дійсну частину. Всі розглянуті раніше типові ланки, крім ланки з чистим запізненням та нестійкої аперіодичної ланки першого порядку, є мінімально-фазовими.
Передаточні функції немінімально-фазових ланок матимуть вигляд
= |
Тр-Ґ |
т; |
№(р) = ЦТр-\); |
" |
ИУ(р) |
Т2р2 |
к |
|
|
|
^ |
|
|
-Т2р-Ґ |
|||
|
Щр) |
= |
к(Т2р2 - Т2р - |
1); |
Щр) |
= ке~х,). |
|
|
Амплітудно-фазова характеристика, наприклад, ланки з чистим запізненням, згідно з формулою Ейлера,
И^(усо) = /с(соз шт - у зіп шт),
що в комплексній площині становить коло з осями V(со) = к соз сот, К(ш) = -к зіп шт, які є відповідно дійсною й уявною частотними характеристиками.
116
3.8. Рівняння, передаточні функції та частотні характеристики
~систем автоматичного керування
Амплітудно-частотна характеристика А(оо) в загальному випадку,
при к Ф 1,
Л(ш) = /сд/(соз шт)2 + (зіп шт)2 = /с,
а фазочастотна
ф(со)= агсІВттт^.
Амплітудно-фазова характеристика нестійкої аперіодичної ланки першого порядку
Ц - 7 / ш - 1) |
_ /с(-1 - уТш) |
|||
Ж(УСО) : (7/ш- 1)(-у'7ш - 1) |
|
|
1 + Г2ш2 |
|
|
|
|
|
|
дійсна частотна характеристика /У(ш)=- |
|
— - , уявна К(ш) = |
||
|
|
|
1 + Г2ш |
|
кюТ
1 + Г 2 ш 2 ' Амплітудно-частотна характеристика немінімально-фазової лан-
ки вигляду нестійкої аперіодичної ланки першого порядку відрізняється від відповідної характеристики стійкої аперіодичної ланки першого порядку лише знаком £/(ш). Тому (^(уш)розміщатиметься в третьому, а не в першому квадранті комплексної площини. Фазова характеристика цієї ланки ф(ш) = агс!§7ш- тс. Характерною рисою немінімально-фазових ланок є те, що зсув фази у них більше, ніж у відповідних мінімально-фазових ланок. Якщо для мінімально-фазо- вої аперіодичної ланки зсув фази не перевищує то відповідні фазові частотні характеристики немінімально-фазової ланки досягають за абсолютною величиною значення я.
3.8
Рівняння, |
передаточні |
функції |
та частотні характеристики |
||
систем |
автоматичного |
керування |
Рівняння, передаточна функція й амплітудно-фазова характеристика розімкнутої системи. Розімкнута система в ТАК здебільшого розглядається як окремий випадок стану замкнутої сис-
117

Глава З |
МАТЕМАТИЧНЕ ОПИСАННЯ ЛІНІЙНИХ НЕПЕРЕРВНИХ СИСТЕМ |
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
теми, коли зворотний зв язок у системі відсутній і вихідна величина об'єкта керування не надходить на вхід системи.
У цьому разі функціональна схема розімкнутої системи складається з послідовно з'єднаних ланок і не має ніяких принципових відмінностей від відповідної схеми, наведеної раніше.
Водночас рівняння, передаточна функція і відповідно частотні характеристики розімкнутої системи використовуються в ТАК як при розгляді питань теорії, так і самостійно.
Запишемо рівняння послідовно з'єднаних ланок у вигляді:
перша ланка |
Р{ (р)хх иих |
= (?, (р)х{ их; |
||
друга л а н к а |
Р2{р)х2в„х |
|
= |
0і(р)х2^1 |
|
|
|
|
( 3 . 5 0 ) |
(я - 1)-ша л а н к а |
Рп.1(р)хп_ІШХ |
= |
<2п_х (р)хп_{ вх; |
|
п-на л а н к а |
РпІР)хнт |
= |
|
Оп(р)хпваі9 |
де Р{ (/?), Р2(р),..., Рп(р) і 0, (р), <22(р),-.., 0П(Р)— поліноми від р відпо-
відно лівих і правих частин рівнянь динаміки ланок. Диференціальне рівняння динаміки розімкнутої системи запи-
шеться у вигляді
Х її них ~ / ( Х \ ч х ) '
Його можна дістати, підставляючи послідовно значення вихідних величин, знайдених із рівнянь попередньої ланки, в рівняння насту-
пної ланки. Наприклад, |
підставляючи х, вих - |
^ х { цх, одержане з |
||||
|
|
|
|
|
Р\(Р) |
|
рівняння першої ланки, |
в праву частину рівняння другої ланки, діс- |
|||||
таємо рівняння динаміки другої ланки |
|
|
|
|||
|
Л(/>)*2.их = Є 2 |
( р ) % Щ х 1 т х , |
|
|||
або |
|
|
Р\ (Р) |
|
|
|
|
|
|
|
|
|
|
|
Р1(р)Р2(р)х2ша |
|
=01Ш2(р)хіт. |
|
||
Аналогічно для /7-ї ланки рівняння матиме вигляд |
|
|||||
едед... рп(р)х |
ІХ |
= |
о1ш2(р)-Оп(р)хіт. |
|
||
Позначивши |
добуток поліномів лівих |
частин усіх |
рівнянь |
|||
Р{(р)Р2(р)...Рп(р)= |
Р(р), а |
правих |
частин |
01(р)02(р)...0и(р) |
= <2(р), |
|
дістанемо рівняння динаміки розімкнутої системи у вигляді
118

3.8. |
Рівняння, передаточні |
функції та частотні характеристики |
|
~ |
систем автоматичного |
керування |
|
|
Р(Р)х„л их =(2(р)х1нх. |
(3.51) |
|
Рівняння незалежних коливань розімкнутої системи |
|
||
|
Р(р)хамх = 0, |
(3.52) |
|
а характеристичне рівняння — |
|
|
|
|
Р(р)= 0. |
(3.53) |
|
Передаточну функцію розімкнутої системи можна дістати на основі рівняння розімкнутої системи
*1вх |
|
я ^ ш ^ ш = ж , ( Р Ж 2 ( , ) . . . |
Ж » , (3.54) |
р(р) |
Рі(р)Р2(р)--- Р„(р) |
|
тобто передаточна функція системи є добутком передаточних функцій усіх її ланок.
Амплітудно-фазова характеристика розімкнутої системи є добуток амплітудно-фазових характеристик відповідних ланок:
тм = ^ (уш)Ж2 (усо)... Ж„(усо). |
(3.55) |
Рівняння динаміки, передаточна функція й амплітуд- но-фазова характеристика за збуренням замкнутих систем. Функціональну схему замкнутої системи з п ланок показано на рис. 3.27. Об'єктом автоматичного регулювання є ланка п, на яку діє зовнішнє збурення Р(і). Регульований параметр -— вихідна величина об'єк-
^Х п вих *
Рівняння динаміки. Система рівнянь окремих ланок у складі замкнутої системи дещо відрізняється від системи рівнянь цих самих ланок розглянутої раніше розімкнутої системи.
Ці відмінності полягають у тому, що в даному разі необхідно враховувати:
« дію збурення Р(і) = Р на об'єкт регулювання;
Рис. 327
119