

Teoriya avtomatichnogo keruvannya
.pdfГлава 1 |
ЗАГАЛЬНІ ВІДОМОСТІ ПРО СИСТЕМИ |
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
17.У чому полягають особливості оптимальних САК?
18.Які види інформації виділяють у кібернетичних системах?
19.У чому полягають особливості САК зі змінною структурою?
20.Сформулюйте головні особливості кібернетичних САК різних видів.
21.Які функції має некерований електропривод в ЕМС?
22.Вкажіть роль керованого електропривода в ЕМ САК.
23. Чи входить об'єкт керування ЕМ САК до складу електропривода?

Глава ОСНОВНІ ЗАВДАННЯ
ЙОСОБЛИВОСТІ ТЕОРІЇ АВТОМАТИЧНОГО
КЕРУВАННЯ
2.1
Теорія автоматичного керування і регулювання
Теорія автоматичного керування в широкому розумінні цього слова є теорія побудови і функціону-
вання систем автоматичного керування.
Згідно з розглянутими раніше системами класифікації САК можна розділити на дві характерні групи, які відрізняються одна від одної як за принципом керування, так і за особливостями функціонування — розімкнуті САК, що базуються на принципі керування іа збуренням, і замкнуті САК, які діють на основі принципу керування за відхиленням. Останні в цьому випадку називаються системами ппоматичного регулювання (САР).
Теорію керування замкнутими системами називають теорією автоматичного регулювання (ТАР), і вона є частиною загальної теорії ппоматичного керування (ТАК).
Основна увага при викладанні ТАК приділятиметься теорії иіпьш складних і поширених замкнутих систем автоматичного регучювання.
Кожна САР є неконсервативною системою, запас енергії якої імппоється за рахунок витрат і надходжень через окремі її елементи (підсилювачі, перетворювачі, об'єкт та ін.).
При відхиленні від стану рівноваги в результаті надходження і витрат енергії через дію збурень у системі виникає відхилення регульованої величини від заданого значення. Регулятор починає працюпа і н і зменшує (в ідеальному випадку зводить до нуля) відхилення річ ульованої величини від заданого значення, через що в системі авіоматичного регулювання виникає перехідний процес. Основним і жданням ТАР є оцінка поведінки САР у перехідних режимах. При
51
Глава 2 |
ОСНОВНІ ЗАВДАННЯ Й ОСОБЛИВОСТІ ТЕОРІЇ |
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
цьому необхідно встановити, чи будуть перехідні процеси затухаючими, а системи стійкими і які характеристики матиме САР.
Поведінка систем автоматичного регулювання в перехідних процесах вивчається в розділі динаміки САР, основними завданнями якої є визначення стійкості та якості САР.
Проте для визначення роботоздатності САР недостатньо того, щоб САР була стійкою і мала достатні показники якості в перехідних процесах (тривалість перехідного процесу, його характер тощо).
Важливим є дослідження поведінки САР у стані рівноваги, що розглядається в розділі статики САР. У статиці САР вивчається питання статичної точності — відхилень регульованої величини від заданого значення після закінчення перехідного процесу, а також статичні характеристики системи.
Основні особливості ТАР такі.
1. Поведінку САР у перехідних режимах не можна оцінювати за характеристиками окремо взятих ланок, які утворюють дану систему. Можливі випадки, коли САР, побудована на основі ланок зі стійкими характеристиками, може бути нестійкою.
Тому дослідження динамічних властивостей САР має виконуватися не за характеристиками окремо взятих ланок, а з урахуванням їхньої взаємодії в загальній, замкнутій системі.
2. Вимоги до САР з позицій статики і динаміки протилежні, тому для їх задоволення потрібно досліджувати питання динаміки і статики в тісному взаємозв'язку, приймаючи в разі необхідності компромісні рішення.
Наприклад, підвищення точності системи після закінчення перехідного процесу потребує збільшення так званого коефіцієнта передачі розімкнутої системи. Водночас зростання цього коефіцієнта негативно впливає на динамічні характеристики САР. При досить великих його значеннях система може стати взагалі нероботоздатною. Тому цей коефіцієнт треба вибирати так, аби задовольнити суперечливі вимоги статики і динаміки на основі компромісного рішення.
3. Різні за своїми фізичними властивостями елементи і системи часто мають подібні диференціальні рівняння динаміки, що свідчить про схожість їхніх динамічних властивостей і характеристик. Тому ТАР є загальною наукою, єдиною для найрізноманітніших за своїми фізичними властивостями САР.
Отже, ТАР можна визначити як науку, що вивчає статичні та динамічні властивості САР, принципи побудови структурних схем, методи вибору параметрів на основі вимог якості системи.
52
2 . 2 . Статика систем автоматичного регулювання.
Умови статичної рівноваги і статичні характеристики ланок
2.2
Статика систем автоматичного регулювання. Умови статичної рівноваги
істатичні характеристики ланок
Основним завданням статики як розділу ТАК є вивчення САР у статичному стані, що виникає після завершення перехідних процесів, зумовлених постійним
ібуренням.
Для перебування системи в стані рівноваги мають одночасно виконуватися такі умови.
1. Відхилення регульованої величини від заданого значення має
порівнювати нулю або деякій сталій величині. |
|
|
2. Надходження регульованої величини |
має дорівнювати її ви- |
|
ірагам |
|
|
<2, |
= 0 - |
(2.1) |
3.Положення регулюючого органу системи і виконавчого двигуна має бути нерухомим.
4.Положення керуючого елемента (значення його вихідної величини) має відповідати нерухомому стану виконавчого двигуна.
Основною характеристикою статики САР є регулювальна характеристика,, яка показує залежність регульованої величини х від виірат робочого середовища (9:
X = Д<2), |
(2.2) |
.і основною характеристикою статики окремої ланки системи є характеристика вхід—вихід:
* в и х = Л * и ) • |
( 2 - 3 ) |
Важливим показником ланки є статичний коефіцієнт передачі:
К = |
(2.4) |
•^ВХ |
|
'Залежно від того, яким чином підтримується сталою регульована |
|
веничина в САР після закінчення перехідного |
процесу, з позицій |
< і а гики визначають два |
основні види САР: статичні й астатичні, |
які було досить детально |
розглянуто при класифікації САР. |
53
Глава 2 |
ОСНОВНІ ЗАВДАННЯ Й ОСОБЛИВОСТІ ТЕОРІЇ |
|
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
|
|
|
|
|
Е |
|
|
|
|
|
|
|
0 |
|
сГ |
|
|
|
|
|
|
|
|
|
|
|
|
х \ |
вх |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
Х 2 |
вих |
|
|
|||
|
Рис. 2.1 |
|
|
|
|
|
|
|
|
|
|
При дослідженні питань статики ду- |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
||||||
же часто виникає потреба побудови ре- |
|
|
\ о |
|
|
||||||
зультуючої |
статичної |
характеристики |
|
|
|
|
|
|
|||
САР за відповідними характеристиками |
|
|
|
|
х 2 |
вх |
|||||
окремих ланок при різних способах їх |
|
|
|
|
б |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
з'єднання. |
|
|
|
|
Х 3 |
Е |
|
|
|||
|
Результуюча |
статична |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||||
характеристика |
паралельно |
з'єднаних |
|
|
|
|
|
|
|||
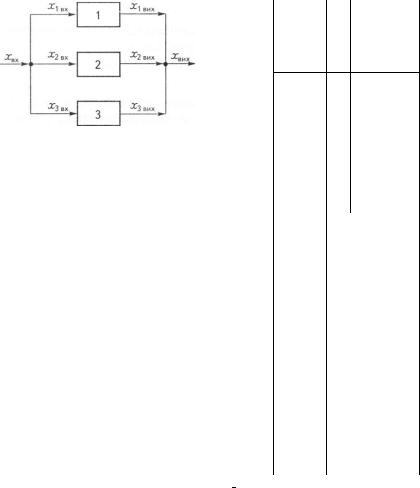
ланок. Паралельним з'єднанням ланок у |
|
|
со |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
ТАР є таке з'єднання, при якому вхідна |
|
|
|
|
|
|
|||||
величина всіх ланок однакова, а резуль- |
|
|
|
|
|
|
|||||
|
|
|
|
|
вх |
||||||
туюча вихідна величина є сумою вихід- |
/ |
|
|
||||||||
|
3 |
|
|||||||||
них величин цих ланок. |
|
|
|
|
|
||||||
Для трьох ланок, згідно з рис. 2.1, |
|
|
|
|
|
|
|||||
можна записати |
|
|
|
|
|
|
СО |
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
||
|
|
2 вх |
" 3 вх > |
|
(2.5) |
|
|
|
|
|
|
"^вих |
Л / \ вих |
^2 вих |
+ |
|
(2.6) |
+ |
|
|
|
||
"^Звих" |
6 " |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||
Якщо статичні характеристики окре- |
0 |
|
|
|
|
|
|||||
|
|
|
|
|
|||||||
мих ланок задані у вигляді графіків, по- |
|
|
|
|
г |
|
|||||
казаних на рис. 2.2, а, б, в, то кожну точ- |
|
|
|
|
|
|
|||||
ку результуючої |
характеристики |
легко |
|
Рис. 2.2 |
|
|
|||||
побудувати як суму ординат трьох характеристик ах + бх + в\ , що відповідають деякому значенню вхідної величини (рис. 2.2, г).
Результуюча статична характеристика послідовно з'єднаних ланок. Послідовне з'єднання ланок — це таке з'єднання,
54
2 . 2 . Статика систем автоматичного регулювання.
Умови статичної рівноваги і статичні характеристики ланок
мри якому вихідна вели- |
|
вих |
вх |
|
вих |
в |
||||
чина попередньої ланки |
|
|
|
|
|
|
|
|
: Х 3 є |
|
< вхідною для наступної |
1 |
|
|
|
|
2 |
|
3 |
||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||
(рис. 2.3). Результуюча ха- |
|
|
|
Рис. 2.3 |
|
|
||||
рактеристика групи |
по- |
|
|
|
|
|
||||
пі ідовно з'єднаних |
ла- |
|
|
|
|
|
|
|
|
|
пок визначає залежність вихідної величини останньої ланки від вхідної величини першої ланки.
У загальному випадку для п послідовно з'єднаних ланок маємо
|
|
Х п вих |
|
У С ^ Ч ВХ |
) • |
|
(2.7) |
|
Якщо рівняння п ланок мають вигляд |
|
|
||||||
К\ Х\ „у, |
х*) „..„ — Кі х , |
.... х |
^ II П ВХ 9 |
|||||
|
|
|
|
|
|
|
|
К х |
то, враховуючи, що х, вих = |
|
' X |
2 вих |
• у |
|
дістанемо |
||
рівняння ланок у вигляді |
2 вх > |
|
З ВХ 9 )1— 1 вих |
|
||||
|
|
|
|
|
|
|
||
|
|
С\ вих |
~ |
X, в х , |
|
|
||
|
|
К2хи |
|
К 1 К 2 х ї вх ; |
|
|
||
хп-1 вих |
— Кп_{хп_2 |
вих - КХК2 ... Ки_{хх вх; |
|
|||||
Хпйі\х |
= КпХп_! вих |
|
= К{ К2 |
... КпХЛ |
вх . |
|
||
Останнє рівняння записаної системи і є результуючим рівнянням |
||||||||
// послідовно з'єднаних ланок: |
|
|
|
|
|
|
||
|
Хптх |
|
|
- КпХ1вх . |
|
(2.8) |
||
Передаточний коефіцієнт п послідовно з'єднаних ланок, який |
||||||||
часто називають коефіцієнтом |
підсилення розімкнутої системи, |
|||||||
|
|
К = |
К1К2...К„. |
|
|
(2.9) |
||
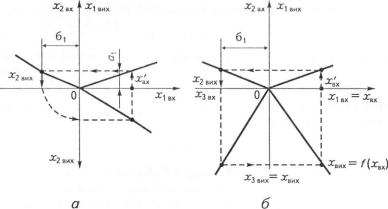
І Іри двох послідовно з'єднаних ланках, які мають характеристимі, показані на рис. 2.2, а, б, результуючу характеристику будують іакпм чином. У першому квадранті будують характеристику першої і;інки х, вих =К1хІВХ, відкладаючи вхідну величину по горизонтальній осі. Характеристика другої ланки будується в другому квадранті, а'іо, оскільки х, вих = х2 в х , вхідна величина х2вх відкладається на вер111 кальній осі. Знайдені на горизонтальній осі другого квадранта зна-
55
Глава 2 |
ОСНОВНІ ЗАВДАННЯ Й ОСОБЛИВОСТІ ТЕОРІЇ |
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
чення х2 в их переносять на вертикальну вісь четвертого квадранта, в якому і записують залежність х2 в их = /(*, вх). Відповідні графічні характеристики показано на рис. 2.4, а.
При побудові результуючої характеристики для трьох ланок з урахуванням того, щох2 в и х = х3 в х , характеристику третьої ланки розміщують відповідним чином у третьому квадранті, а результуючу — у четвертому (рис. 2.4, б).
Рис. гл
При послідовному з'єднанні більш як трьох ланок за викладеною вище методикою можна побудувати результуючу характеристику для трьох ланок, а далі розглядати її як окрему характеристику і будувати загальну результуючу характеристику з урахуванням інших ланок. У результаті дістанемо результуючу графічну характеристику вигляду
ВИХ ~ / І Х \ ВХ )•
Характеристика ланки зі зворотним зв'язком. Для ланки зі зворотним зв'язком (рис. 2.5) фактичне значення вхідної величини можна записати у вигляді
Х ВХ ~~ Х ВХ — Х ЗВ.З •
Для пояснення дії зворотного зв'язку на рис. 2.6 наведено характеристику ланки без урахування зворотного зв'язку (крива 1) і характеристику самого зворотного зв'язку (крива 2).
56

2.3.Статична похибка і коефіцієнт передачі (підсилення)
Якщо врахувати, що на вхід ланки без |
вх>(5?) вх»1 |
Лапка |
ви» |
||||||
іворотного |
зв'язку |
надходить |
величина |
х з в Л Г - |
|
|
|||
\, ич, то |
на |
виході |
цієї ланки |
дістане- |
[ _ _ | |
~ |
1_ |
||
МО Х, 13ИХ. Якщо |
цю |
величину, |
ЗГІДНО 3 |
т |
~~ |
1 |
|||
РИС. 2.5, подамо на вхід ланки зворотного |
|
||||||||
їв язку, то на и виході одержимо величи- |
Рис 2 5 |
|
|||||||
|
|
|
|||||||
ну х ш з , |
яка |
при |
підключенні ланки |
зво- |
вхідної величини |
основної |
|||
ротного |
зв'язку |
або |
додаватиметься |
до |
|||||
ч піки (при додатному зворотному зв'язку), або відніматиметься від неї (при від'ємному зво-
ротному |
зв'язку). |
Якщо |
|
|
|
4 |
||||
шоротний |
зв'язок |
додат- |
|
|
|
|
||||
ний, то, щоб дістати на |
|
|
|
|
||||||
виході ланки ту саму ве- |
|
|
|
|
||||||
личину, що і без зворот- |
|
|
|
|
||||||
ного зв'язку, на вхід мож- |
|
|
|
|
||||||
на подати меншу величи- |
|
|
|
|
||||||
ИУ |
*вх = Х\ вх ~~ *ЗВ.З- |
У |
|
|
|
|
||||
цьому |
випадку |
матимемо |
|
|
|
|
||||
гочку |
А |
характеристики |
|
|
|
|
||||
чаїіки з додатним зворот- |
и |
Т |
Т |
Т |
||||||
ним |
зв'язком |
(крива |
4). |
|
хзв.3 |
^зв.з |
|
|||
І Іри від'ємному зворотно- |
|
|
|
|
||||||
му зв'язку за тих самих |
|
Рис. 2.6 |
|
|||||||
умов на вхід ланки слід |
|
|
|
|
||||||
подати |
більшу |
величину |
|
|
|
|
||||
х пч |
= х\ вх + хзв.з' |
дасть відповідну точку В характеристики ланки з |
||||||||
під'ємним зворотним зв'язком |
(крива |
3). |
|
|
||||||
2.3
Статична похибка і коефіцієнт передачі (підсилення)
Статична похибка — це відхилення регульованої величини від заданого значення після закінчення перехідного процесу. Вона є одним із основних показників
якості САР.
57
Глава 2 |
ОСНОВНІ ЗАВДАННЯ Й ОСОБЛИВОСТІ ТЕОРІЇ |
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
|
т |
|
Вважатимемо, що головного зворотного |
|||
|
|
|
|
зв'язку ГЗЗ в системі немає (САК розімкну- |
||
р |
|
|
0 |
та; рис. 2.7). Тоді при початковому значенні |
||
|
|
збурення |
/0 (і) вихідна величина |
об'єкта |
||
|
|
|
|
|||
|
г з з |
|
||||
|
|
х()вих відповідатиме потрібному значенню |
||||
|
|
|
|
регульованої величини. Зміна збурення до |
||
|
Рис. 2.7 |
|
значення /, (!) призведе до зміни вихідної |
|||
|
|
|
|
величини |
об'єкта до значення хх вих |
і появи |
відхилення при розімкнутому стані системи
Д * = * 0 в , . х ~ вих- ( 2 . 1 0 )
Якщо замкнути систему за допомогою головного зворотного зв'язку, то в замкнутій системі регулятор Р діятиме на зменшення відхилення Ах (в ідеальному випадку до нуля). Проте регулятор не в змозі повністю ліквідувати Ах, а зменшуватиме його на деяку величину, яку позначимо Ахвих. Частина Ах, яка залишається в замкнутій
системі, є статичною похибкою замкнутої системи: |
|
А = А х - Ахвих. |
(2.11) |
Величина А надходить знову на вхід об'єкта, тому можна записати
А = Ахих. |
(2.12) |
Розділивши всі члени рівняння (2.11) на величину А і врахувавши вираз (2.12), дістанемо
| _ Ах АхШІХ
АД*«х
Оскільки Ахвих/Ахвх = К — коефіцієнт передачі (підсилення) розімкнутої системи, то статичну похибку замкнутої системи запишемо у вигляді
А = |
(2.13) |
1 + *
Зцієї формули можна зробити такі висновки.
1.Статична похибка замкнутої системи прямо пропорційна відхиленню регульованої величини при розімкнутому стані системи і зменшується в разі збільшення коефіцієнта підсилення розімкнутої системи.
2. Оскільки величина Ах при розімкнутій системі є функцією збурення, що діє на об'єкт, то статична похибка замкнутої системи залежить від збурення.
58
2.3. Статична похибка і коефіцієнт передачі (підсилення)
3. Як буде показано далі при дослідженнях САР, зростання коефіцієнта передачі розімкнутої системи погіршує динамічні властивості (зменшує так званий запас стійкості системи). Тому бажання іменшити похибку замкнутої системи за рахунок зростання коефіцієнта передачі може призвести до втрати стійкості САР. Це відображає суперечність між вимогами статики та динаміки і веде до необхідності компромісного узгодження вимог статичної точності та стійкості САР.
І Іеможливість задоволення вимог статики і динаміки при деякій прийнятій САР спричинює необхідність зміни її структури.
Статична похибка САК при комбінованому керуванні.
! Іри комбінованому керуванні функціональна схема має дві частини. Одна з них — це замкнутий контур об'єкт (О) та регулятор (Р), який забезпечує регулювання за відхиленням, а інша — розімкнутий (ком-
пенсаційний) канал К, котрий формує |
|
ПО |
|||
компенсаційний сигнал на |
об'єкті |
керу- |
|
||
вання (рис. 2.8). За допомогою компенса- |
|
К |
|||
|
|
||||
ції"! ного сигналу в комбінованій системі |
|
|
|||
реалізується також принцип керування за |
|
О |
|||
збуренням. |
|
|
|
|
Х 0 в |
Якщо розімкнути замкнутий контур на |
|
||||
|
|
||||
виході об'єкта, то відхилення вихідної ве- |
р |
|
|||
личини об'єкта при дії компенсаційного |
|
|
—— |
||
каналу обчислюється за формулою |
|
|
|
|
|
А * в и х = |
вих |
"^3 вих + > |
(2-14) |
||
де х0вих — початкове значення регульованої величини, що дорівнює іаданому; х{ вих — нове значення вихідної величини об'єкта, яке відповідає зміні збурення; хк — компенсаційна дія розімкнутого каналу.
Відхилення Ахвих буде значно меншим від відхилення при відсутпості компенсаційного каналу Ахвих < Ахвих. Тому статична похибка комбінованої САК
дк = |
АХК |
(2.15) |
|
|
1 + К |
(>уде менша за похибку замкнутої САР
АК < А = АгВИХ
1 + А '
59