

Teoriya avtomatichnogo keruvannya
.pdfГ л а в а 3 |
МАТЕМАТИЧНЕ ОПИСАННЯ ЛІНІЙНИХ НЕПЕРЕРВНИХ СИСТЕМ |
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
• що замикання системи регулювання відбувається за допомогою від'ємного зворотного зв'язку. Це враховується введенням знака «мінус» на вході першої ланки, отже, -хпшх = х1их.
У зв'язку з цим рівняння ланок замкнутої системи стабілізації можна записати у вигляді:
перша ланка |
Р{ (р)х{ вих |
= - (?, (р)хпшх; |
|
друга ланка |
Р2 (р)х2 ШІХ |
= (}2 (р)х{ вих; |
|
|
|
|
(3.56) |
(п - 1)-ша л а н к а |
Рп-\(Р)хп-Хт |
= |
(р)х„_2аіІХ; |
п-на ланка (об'єкт) |
Рп(р)хпиих |
= |
0„(р)хп_ Івих + Яр)/ 7 , |
де £(/?) — передаточний поліном об'єкта за збуренням. |
|||
Розглядаючи ланки з першої по п - 1 |
як деяку розімкнуту систе- |
||
му, записуємо її рівняння |
х„_1вих = /(хпшх)у вигляді |
||
Р\ ( Р ) Х п - 1 иих ~ |
( / > ) * „ вих ' |
||
де /> (/>) - /> (р)Р2(р)... />я_1 (/>) і о, (/>) = б! (р) 02(р)... Оп_{(р) - добутки поліномів лівих і правих частин усіх рівнянь, крім рівняння об'єкта. Отже, систему з п рівнянь можна замінити двома рівняннями:
\р\(Р)хп- івпх = -(1\(Р)хпшк, |
(3 |
\рп(р)хпш* =Оп(Р)Хп-І вих
Підставивши вираз х„_1вих = - — ^ х п ш х у рівняння об'єкта, піс-
Л Ср)
ля нескладних перетворень дістанемо рівняння динаміки системи стабілізації у вигляді
[Р(р) + 0(р)]хІІШа = Р{ (Р)5(Р)Р. |
(3.58) |
Слід зазначити, що для того, щоб мати можливість скористатися цим рівнянням, складні структурні схеми необхідно спростити і привести до одноконтурного вигляду.
Рівняння незбурених коливань замкнутої системи має вигляд
[Р(р)+0(р)]х„„„ =0, |
(3.59) |
а характеристичне рівняння — |
|
Р(р) + О(Р) = 0- |
(3.60) |
120
3.8. Рівняння, передаточні функції та частотні характеристики систем автоматичного керування
Якщо |
перемножити співмножники Рх (р)Р2 (р)... Рп(р) |
і |
0\ (р)02(р)' |
-0п(р)т& згрупувати їх за однаковими показниками, |
то |
характеристичне рівняння замкнутої системи можна записати так:
а0р" +а{р"~1 +а2рп~2 + ... + а„_{ р+ ап = 0, |
(3.61) |
де п — степінь характеристичного рівняння; а0,..., ап — коефіцієнти рівняння, що залежать від параметрів ланок системи.
Передаточна |
функція |
й |
амплітудно-фазова частотна |
характерис- |
тика замкнутої |
системи |
за |
збуренням. Передаточну ф у н |
к ц і ю м о ж н а |
знайти з рівняння (3.58) у вигляді
И^(р) = *..-их _ Рі(р)$(р)
рР(р) + Є(р)
Розділивши чисельник і знаменник на Р(р) і врахувавши, що
Р\(р) 1 О(р) ч ^
——— = ; —— = уу{р) — передаточна функція розімкнутої систе-
Р(Р) Рп(Р) Р(Р)
ми, а ^^ = Ж / ( р ) — передаточна функція об'єкта за збуренням,
Рп(Р)
дістанемо передаточну функцію системи стабілізації за збуренням:
1 + IV (р)
Відповідна амплітудно-фазова характеристика системи стабілізації
V/ р (у'ю) = |
1 + |
. |
|
ЩМ |
|
Знаходження рівняння замкнутої |
системи автоматичного керуван- |
|
ня за допомогою теореми Крамера. Згідно з т е о р е м о ю Крамера це рів-
няння має вигляд
Ах„в и х =Л,, |
(3.64) |
де А — головний визначник (детермінант) системи; Д/с |
— приєдна- |
ний детермінант; хпшх — вихідна (регульована) величина об'єкта. Для знаходження А необхідно записати рівняння ланок системи
автоматичного керування:
с/п{р)х{ |
+сі12(р)х2 |
+ ... |
+ сі1п(р)х„ |
=/і(0; |
|
|
сі12(р)хї |
+ сі22(р)х2 |
+... + с12п(р)х„ |
= /2(ґ); |
^ 65) |
||
сіп{ (р)х{ |
+ сіп2(р)х2 |
+... + |
сі/іп(р)х„ |
= |
/ „ ( / ) , |
|
121
Г л а в а 3 |
МАТЕМАТИЧНЕ ОПИСАННЯ ЛІНІЙНИХ НЕПЕРЕРВНИХ СИСТЕМ |
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
де х{,...,хп |
— змінні системи; /, ( / ) , / „ ( / ) — збурення; |
•сіпп(р) — оператори ланок системи.
Узагальному випадку
ії д ІР) ~ аоРп + а\Рп~1 +а2р"~2 +... + сіп_1р+ап,
де р = —; я0 ,..., |
— коефіцієнти, що визначаються параметрами |
сіі |
|
відповідних ланок.
Розглядаючи наведені вище рівняння ланок системи як алгебричні і відкидаючи для спрощення запису символ р, маємо
|
X, |
х2 . |
.. |
хк |
. |
•• |
Х « |
|
д = |
|
с1[2 . |
|
|
|
•• |
я |
(3.66) |
|
й22 . |
|
|
|
•• <*2п |
|||
|
|
А пі • |
•• |
СІпк |
• |
|
|
|
Для знаходження величини Ак |
стовпець головного визначника, |
|||||||
що відповідає регульованому параметру хк, треба замінити відповідними збуреннями (якщо в деяких ланках вони відсутні, то записують нуль).
|
|
х2 |
. |
|
|
|
• |
х„ |
|
|
|
|
|
|
|
||||||
|
с*и |
СІп |
. |
|
• • |
/ , ( 0 • |
• |
„ |
|
|
|
а2, |
й22 |
. |
|
.. |
т • |
• |
<І2п |
|
|
|
СІп\ |
|
|
|
.. |
т . |
• |
СІпп |
|
|
Рівняння незбуджених коливань згідно з теоремою Крамера має |
||||||||||
вигляд |
|
|
|
|
|
|
|
|
|
|
|
|
Ахк = 0, |
(3.68) |
|||||||
а характеристичне рівняння |
|
|
|
|
|
|
|
|
|
|
|
|
|
А = 0. |
(3.69) |
||||||
Рівняння замкнутої системи в нормальній |
формі Коші. Р і в н я н н я |
|||||||||
замкнутої системи |
|
|
|
|
|
|
|
|
|
|
122
3.8. Рівняння, передаточні функції та частотні характеристики
~систем автоматичного керування
|
|
+ а, сі"-1: +... |
|
|
|
|
|
а0 |
СІ"х |
+ |
а |
п-і |
СІХ |
+ а.,х = |
|
|
сіі" |
' сіі |
|
|
Ті |
|
|
|
= Ь, сг'/ + ... + Ь |
т~і |
|
|
+ ь |
г |
|
|
|
сії"' |
|
і. |
^ |
ипи |
|
|
|
|
|
|
сіі |
|
|
може бути записано у вигляді систем рівнянь ланок першого та другого порядків (у принципі можливий і вищий порядок рівнянь лапок). Рівняння другого порядку завжди можна замінити двома рівняннями першого порядку.
|
Наприклад, якщо рівняння другого порядку для деякої змінної |
|||||
має |
вигляд |
|
|
|
|
|
|
|
с!2х] |
сіхх |
+ а2х\ |
= |
Ь\ хк> |
|
|
сіі1 |
+ а\-ТГ |
|||
|
|
СІІ |
|
|
||
то, |
СІХ, |
|
|
|
|
|
позначивши —- = х/ + , , дістанемо рівняння першого порядку |
||||||
|
сіі |
|
|
|
|
|
|
|
і |
, |
|
|
|
|
а{) |
—— |
= Ь,хк |
-а{хі + |
1 |
-а2х{. |
|
|
сіі |
|
|
|
|
Отже, можна дістати рівняння замкнутої системи у вигляді системи рівнянь першого порядку (що називаються рівняннями в нормаль-
ній формі Коші)\
сіх,
сіі
СІХ 2 |
|
|
|
|
~сїї~ = «21*1 |
+а 22х2 |
+^-а2ях„; |
( 3 . 7 0 ) |
|
СІХП |
_ |
+ ап2х2 |
+ ... аппхп, |
|
—— - сіп\Хх |
|
|||
сіі |
|
|
|
|
де х{,х2,хп — координати стану системи. (У правій частині рівнянь деякі коефіцієнти можуть дорівнювати нулю.)
Система рівнянь у нормальній формі Коші в даному разі є математичною моделлю системи. Цю систему рівнянь можна записати в матричній формі:
— ~ Ах , сії — УІЛ
123
Глава З |
МАТЕМАТИЧНЕ ОПИСАННЯ ЛІНІЙНИХ НЕПЕРЕРВНИХ СИСТЕМ |
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
де
ап |
ап |
... |
ах |
а21 |
а22 |
... |
а2 п |
А = |
|
|
|
а„х |
а„ |
|
|
— матриця коефіцієнтів; |
|
|
|
х =
— вектор-стовпець.
Характеристичне рівняння замкнутої системи
сієї [А - рЕ] = 0,
де р — змінна в характеристичному рівнянні замкнутої системи вигляду
а0р" + ахрп~{ +а2р"~2 + ... + ап_{р+ ап = 0;
1 |
0 ... |
0" |
0 |
І ... |
0 |
0 |
0 ... |
1 |
одинична матриця.
3.9
Приклад знаходження рівняння динаміки системи стабілізації напруги генератора постійного струму
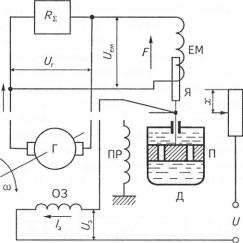
Розглянемо систему автоматичного керування, спрощену принципову схему якої зображено на рис. 3.28, де Г — генератор, який є об'єктом автоматичного керуван-
ня з напругою ІІГ, що є регульованим параметром; ЕМ — обмотка
124
|
|
3 . 9 . |
Приклад |
знаходження рівняння |
динаміки системи стабілізації напруги |
||||
|
|
|
генератора постійного струму |
|
|
||||
електромагніту; Я — якір |
|
|
|
|
|||||
електромагніту; К — регу- |
|
|
|
|
|||||
лювальний резистор у ко- |
|
|
|
|
|||||
ні обмотки збудження ге- |
|
|
|
|
|||||
нератора Г; Д — масля- |
|
|
|
|
|||||
ний |
демпфер, |
поршень |
|
|
|
|
|||
якого П має отвори; ПР |
|
|
|
|
|||||
|
|
|
|
||||||
пружина; |
Я^ |
|
еквіва- |
і |
# |
||||
лентний опір споживачів, |
|
|
|
|
|||||
який характеризує наван- |
|
|
|
|
|||||
таження |
генератора. |
|
|
|
|
|
|||
|
При змінному наван- |
|
|
|
|
||||
таженні генератора і не- |
|
|
|
|
|||||
змінній |
швидкості |
його |
|
|
|
|
|||
обертання со |
первинним |
|
|
|
|
||||
двигуном (на схемі не по- |
|
|
|
|
|||||
казаний) |
відповідним чи- |
РЕ/С. 328 |
|
|
|||||
ном змінюється струм /Г, |
|
|
|||||||
і |
напруга |
генератора |
|
|
|
|
|||
І]у - Е - /ГЛГ, |
де |
КГ |
— активний |
опір якірного кола |
генератора; |
||||
Е - /:Фсо — електрорушійна сила генератора (к — стала генератора; Ф = с.3І3 — магнітний потік обмотки збудження зі струмом /3 , при сталій с3).
При со = соп5І Е = кГФ може змінюватися тільки за рахунок зміни напруги збудження 1}3.
Для стабілізації напруги генератора при зміні його навантаження потрібно відповідним чином змінювати напругу /У3, що спричинює зміну струму /3 й електромагнітного потоку генератора Ф. Наприклад, якщо навантаження генератора збільшується, що зумовлює зменшення напруги £/г (напруги на обмотці електромагніта то сила притягання електромагніта Ем зменшується, і під дією пружини ІІР якір електромагніту переміщується вниз. При цьому опір резистора К зменшується, відповідно зростають напруга збудження £/3, струм /3 , потік Ф і напруга генератора £/г збільшується. При зменшенні навантаження генератора напруга зростає. При цьому завдяки відповідній дії системи автоматичного керування напруга збудження 11Л зменшується, що стабілізує напругу генератора 1/Г.
Згідно з викладеним раніше розглянута система автоматичного керування є звичайною замкнутою системою стабілізації, в якій реа-
125

Глава З |
МАТЕМАТИЧНЕ ОПИСАННЯ ЛІНІЙНИХ НЕПЕРЕРВНИХ СИСТЕМ |
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
лізовано принцип керування за відхиленням. Крім того, вона не має підсилювача в ланцюгу керування і тому є системою прямої дії.
Розглянувши принцип роботи окремих елементів і системи в цілому, перейдемо до складання функціональної схеми.
При цьому треба мати на увазі, що принциповим є відповідність розміщення елементів згідно з їх дією один на одного й узгодження вхідних і вихідних величин.
Тому об'єкт керування може бути розміщений у будь-якому місці функціональної схеми. Але здебільшого прийнято розміщувати його в правій частині схеми. Дотримуватимемося цього і далі. Згідно з наведеними на принциповій схемі зображеннями і функціональним призначенням окремих елементів при виконанні завдань автома-
тичного керування функціональна схема буде такою, як показано на рис. 3.29.
У схемі, наведеній на рис. 3.28, рухому сукупність елементів, до якої нале-
жить якір електромагніту, поршень демпфера Д, пружина ПР та двигунок реостата можна розглядати як єдиний елемент КЕ (див. рис. 3.29), який виконує керуючі функції в функціональній схемі. Інші позначення на рис. 3.29 такі: Рем — зусилля тяги електромагніту;
х— переміщення двигунка реостата; /(/)— збурення генератора, яке
вданому разі можна розглядати як струм в якірному колі генератора, що залежить від еквівалентного опору всіх споживачів електроенергії, підключених до якоря генератора (електричної мережі, якщо вона живиться тільки від цього генератора).
Спочатку розглянемо систему в розімкнутому стані. Принципово розімкнути систему можна в будь-якому місці схеми, але найчастіше це роблять на виході об'єкта, тому вважатимемо, що вихідна величина розімкнутої системи є вихідна величина об'єкта І)г, а вхідна — напруга на обмотці електромагніта СІШ. У цьому разі рівняння розімкнутої системи має дати залежність у динаміці
=) •
Як було показано раніше, для знаходження рівнянь системи необхідно скласти рівняння окремих їх елементів.
126
3.9. Приклад знаходження рівняння динаміки системи стабілізації напруги генератора постійного струму
Рівняння динаміки генератора Г. Це рівняння матиме вигляд
и г
При складанні рівнянь окремих елементів розробник має деяку свободу дій, завдяки якій окремий досить складний елемент можна представити його окремими (складовими) частинами. При цьому важливо узгодити їхні вхідні та вихідні величини і відобразити взаємодію окремих частин елемента.
У даному разі генератор можна розглядати як складний елемент, основними частинами якого є обмотка збудження та якірне коло генератора. Рівняння генератора виведено раніше. Це рівняння в операторній формі
(Т[Р+\)АІІг=кгАІ/,,
де Тї — стала генератора; АІ/Г, А£/3 — відхилення від початкових значень відповідних величин; кг — передаточний коефіцієнт генератора.
Рівняння обмотки електромагніта. У загальному випадку його рівняння має дати залежність у динаміці
= /(«ем )•
Якщо знехтувати коефіцієнтом самоіндукції котушки, то зусилля тяги елемента можна подати у вигляді
Р = с І/2
ом ^ аи ^ ом 1
де сем — коефіцієнт пропорційності.
|
|
|
1 |
Р9М |
|
та Ц |
, |
запишемо |
|
Ввівши початкові значення величин |
|
||||||||
|
|
|
|
ем о |
|
|
ем о ' |
|
|
Ррм |
+ АРр |
= с* |
(1/рм |
+ АІ/9М |
У. |
|
|||
ем о |
ем |
ЄМ V |
|
|
|
ем ' |
|
|
|
Позначимо нелінійну функцію так: (1/ем |
|
+ А(/ем )2 = /(2). Лінеа- |
|||||||
ризуючи її за допомогою ряду Тейлора, дістанемо рівняння |
|||||||||
т = т + |
|
«)=^ем0 |
+ 2г/СМо д |
|
|||||
або |
|
|
|
|
|
|
|
|
|
^ем„ + Д^ем = Сем^ем„ + Сем 2і/ем„ А^ем •
127
Г л а в а 3 |
МАТЕМАТИЧНЕ ОПИСАННЯ ЛІНІЙНИХ НЕПЕРЕРВНИХ СИСТЕМ |
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
Враховуючи, що рівняння рівноваги для початкового положення
р |
=с |
II2 |
Л ем о |
^ ем |
ем0 ' |
запишемо рівняння динаміки обмотки електромагніту у відхиленнях:
= кем АII" еме и ,• |
(3.71) |
Де кем = семем 21/.емп • |
|
Рівняння рухомої частини елементів. Як було |
п о к а з а н о р а н і ш е , ру- |
хомі елементи (якір електромагніту, поршень демпфера, пружина та двигунок реостата) можна розглядати як єдину механічну систему елементів з масою т.
Рівняння динаміки даної системи |
в загальному вигляді |
|||
|
|
|
РДІІН = Рдв |
- Роп ' |
де Р |
йгх |
динамічне зусилля; Р = Рем — рушійне зусилля |
||
- т— |
||||
сіі
електромагніту; Рш — зусилля опору переміщенню рухомої частини елементів. Зусилля Роп в даному разі визначається жорсткістю пружини сп р , величиною переміщення рухомої частини елементів х та вагою С0 , опором, яке спричинює масло при переміщенні в цьому середовищі поршня П демпфера, а також опором переміщенню двигунка резистора який має бути порівняно невеликим (ним можна знехтувати).
Розглянемо ці складові Роп окремо:
• опір пружини
^пр =спрх = спр(х о + Ах);
• опір переміщенню поршня демпфера
г |
сіх |
_ |
(х{) + Ах) _ |
сі Ах |
д |
"Сд Ті |
~Сд |
а |
"Сд |
де сд — стала демпфера, яка зумовлюється властивостями масла і особливостями конфігурації поршня П (наприклад, кількістю «активних» отворів у поршні та ін.).
Наприклад, поршень з отворами матиме менший опір переміщенню в масляному середовищі, ніж суцільний. При цьому чим більше отворів у площині поршня демпфера, тим менший опір його переміщенню. Ставлячи заглушки в деякі отвори поршня демпфера, можна ступінчасто змінювати його властивості (величину сд).
128
3.9. Приклад знаходження рівняння динаміки системи стабілізації напруги генератора постійного струму
При нерухомому поршні опір ГД відсутній.
Нехтуючи порівняно невеликим опором двигунка резистора, запишемо
сі Ах
^ о п о + Л / 7 о п = ^ п р ^ о + С п р Д Х + С д — + с 0 .
Виключивши рівняння статики /70П() = спрх{) + С(), дістанемо
|
а г |
|
л |
^/Ах |
Підставивши ці складові в рівняння динаміки, одержимо |
||||
с!2(х0 + Дх) |
_ |
|
сіАх |
|
т |
ї? |
= |
~ С"р |
~С д |
або |
|
|
|
|
. |
„ |
сі2Ах |
сіАх |
|
|
ш = т |
Т Г |
+ Сд Т |
+ Спр |
Нехтуючи величиною спрАх, яка значно менша від «динамічних» складових опору, запишемо рівняння елемента КЕ у відхиленнях в операторній формі:
= (тр2 + сЛр)Ах.
Позначивши — = Гд; — = кке, дістанемо
(ТДр+\)рАх = ккеАГем. |
( 3 . 7 2 ) |
Рівняння резистора, який є безінерційним елементом, можна записати у вигляді
АИ3=кяАх, |
( 3 . 7 3 ) |
де кЛ — коефіцієнт пропорційності або передачі даного елемента. Отже, рівняння елементів, з яких складається дана система,
( 7 > + 1 ) Д £ / г |
=кГАИ3; |
|
Д р |
- к \ТТ |
• |
і Л І ем |
ем |
ем > |
( 7 > |
+ 1 )рАх |
= кКеАГем; |
А Ц3 |
= к к Ах. |
|
5 Т е о р і я а в т о м а т и ч н о г о к е р у в а н н я |
1 2 9 |