

Teoriya avtomatichnogo keruvannya
.pdfГлава 1 |
ЗАГАЛЬНІ ВІДОМОСТІ ПРО СИСТЕМИ |
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
ною величиною х; П — передаточний, ЕД — електродвигунний, ПЕ — перетворювальний, КЕ — керуючий елементи; Ф — силовий потік електричної енергії; М — потік механічної енергії; 3 — завдання.
Рис. 124
Як передаточний елемент, призначений для передачі механічної енергії від двигуна до об'єкта, використовують муфти різних видів (механічні, електромагнітні, феромагнітні та ін.). У деяких випадках (безредукторні приводи) механічна енергія від електродвигунного елемента може безпосередньо надходити до об'єкта керування. Безпосереднє перетворення електричної енергії на механічну в ЕМ САК виконується керованими електродвигунами змінного і постійного струму.
Електротехнічний перетворювач ПЕ перетворює параметри електричної енергії (напругу, частоту) і підсилює її. Залежно від використаного виду електродвигуна і способу керування ним електротехнічний перетворювальний елемент може бути представлений: тиристорним перетворювачем у системі електропривода тиристорний перетворювач—двигун постійного струму (ТП— Д), силовим магнітним підсилювачем у системі електропривода магнітний підсилю- вач—двигун (МП—Д); тиристорним частотним перетворювачем у системі електропривода (ТПЧ—Д) та ін.
Керуючий елемент КЕ призначений для формування сигналу керування згідно із завданням. Як КЕ можна використовувати регулюючі резистори, формувачі імпульсів при імпульсно-фазовому керуванні тиристорами, проміжні магнітні підсилювачі тощо.
Функціональну схему замкнутої ЕМ САК (ЕМ САР) показано на рис. 1.25. Оскільки перетворення силових потоків енергії та електромеханічні характеристики двигунів детально вивчаються в курсах «Теорія електропривода» і «Системи керування електропривода», то основна увага приділятиметься питанням інформації та керування. Тому на рис. 1.25 показано напрям дії тільки сигналів керування.
У схемі є вимірювальний елемент ВЕ, що контролює зміну керованого параметрах. Пропорційна йому величинах, надходить до вуз-
40

1.7. Основні загальні відомості про елементи САК та їхні особливості. Класифікація елементів
1.1 порівняння ВП і порівнюється з величиною завдання х3. При наминосі і розузгодження Ах = х3 - х1? яке надходить на вхід керуючого
|
А Х |
д |
|
ПЕ |
|
— ЕД — |
П |
0 |
|
|
|
|
|
||||||
|
ВП — КЕ |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
ХТ |
|
|
|
|
|
|
|
|
|
|
|
|
ВЕ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.25 |
|
|
|
||
<• іемента, в системі формується керуюча дія |
що надходить на вхід |
||||||||
оімкта і згідно з дією від'ємного зворотного зв'язку має зменшити (аію звести до нуля) величину Ах.
1.7.
Основні загальні відомості про елементи САК та їхні особливості. Класифікація елементів
Властивості САК багато в чому залежать від особливостей елементів, з яких складається відповідна
іїй тема. Загальне призначення елементів САК полягає у якісному і кількісному перетворенні сигналів, які надходять від попереднього «•'іемента (ланки) системи, і передачі його до наступного елемента.
За допомогою відповідних елементів виконуються вимірювальні,
і«-руїочі, виконавчі та інші функції в САК. За характером цих функ-
цій елементи поділяються на: датчики (давачі), підсилювачі, стаОМ на і ори, двигуни, реле, логічні елементи.
Датчики виконують у САК функції вимірювальних (чутливих) і» ментів. Вони перетворюють пеелектричні величини (швидкість, шиях, прискорення, тиск та ін.) у параметри електричного кола (опір, ємність, індуктивність) або електрорушійну силу (ЕРС). Тому
мічикп є двох видів: параметричні і генераторні.
Підсилювачі мають ту особливість, що їхні вхідна і вихідна вели- ч иї їи ( величинами одного і того самого типу (підсилювачі струму,
41
Глава 1 |
ЗАГАЛЬНІ ВІДОМОСТІ ПРО СИСТЕМИ |
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
напруги, потужності). Вихідна потужність елемента зростає за рахунок потужності зовнішнього джерела енергії (часто електричної мережі).
За характером струму підсилювачі поділяються на змінного і постійного струму, а за принципом дії — на електронні, магнітні, електромашинні, тиристорні та ін.
Стабілізатори мають підтримувати вихідну величину на сталому рівні при зміні вхідної величини або навантаження. Особливістю стабілізаторів як елементів систем автоматики є нелінійність характеристик вхід—вихід: хтх = /(хи х ). Для стабілізаторів ця характеристика має певний нахил щодо горизонтальної осі. В ідеальному стабілізаторі — це пряма, паралельна осі хих.
Двигун — елемент, що використовується в системах автоматичного керування як силовий привод об'єкта або допоміжний двигун (сервопривод), що приводить у дію виконуючі органи САК.
В автоматиці основна увага приділяється серводвигунам невеликої потужності. Вони мають відповідати вимогам: плавності регулювання; малої інерційності; легкості реверсування.
За потужності до 100 Вт найпоширенішими є двофазні двигуни змінного струму з немагнітним, легким ротором, а за більших потужностей — двигуни постійного струму з незалежним збудженням.
Реле — це елемент, в якому неперервній, плавній зміні вхідної величини відповідає стрибкоподібна зміна вихідної величини.
Реле розрізняють за багатьма ознаками:
•функціональному призначенню (керування, захисту, сигналізації та ін.);
•технологічним особливостям (швидкості, тиску);
• принципу дії (електромагнітні, індукційні, теплові);
• наявності контактів (контактні, безконтактні).
Логічні елементи призначені для виконання логічних операцій (функцій), наприклад, вигляду «І»; «АБО»; «НІ»; «ПАМ'ЯТЬ».
Основні загальні характеристики елементів. Передаточний коефіцієнт визначається із загальної статичної характеристики хвих = /(хи х ). При цьому відношення
42
1.7. |
Основні загальні відомості про елементи |
САК та їхні особливості. |
|
Класифікація елементів |
|
|
=к. |
(1.7) |
на швають передаточним статичним коефіцієнтом, якщо хвх і хвих —
усталені значення величин.
Динамічним передаточним коефіцієнтом є похідна
кп |
сіх |
(1.8) |
|
сіх» |
|
Для елементів з лінійними характеристиками Кс = КЛ.
Для датчиків цей коефіцієнт називають коефіцієнтом чутливості,
.і для |
п і д с и л ю в а ч і в |
— |
коефіцієнтом |
підсилення. |
||||
|
Часова |
|
характеристика |
|
||||
в н з 11 ачається |
|
залежністю |
|
|||||
\-1111х |
= / ( 0 |
при |
надходженні |
|
||||
на |
вхід елемента постійного |
|
||||||
сигналу. |
Вона |
характеризує |
|
|||||
динамічні |
властивості |
еле- |
|
|||||
мента. |
|
|
|
|
|
|
|
|
|
Елементи з інерцією ме- |
|
||||||
ханічною, електричною, теп- |
|
|||||||
ловою |
тощо |
мають |
часові |
|
||||
характеристики |
у |
вигляді |
Рис. 126 |
|||||
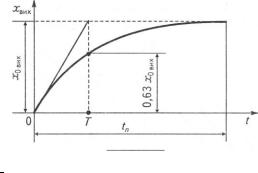
експоненти (рис. |
1.26). Пе- |
|||||||
рехідний процес у них вишачається неоднорідним диференціальним рівнянням першого по-
рядку, розв'язок якого має вигляд |
|
сО-е,-- / Т ) 9 |
(1-9) |
де Т — стала часу елемента. її можна знайти при умові / = |
Т. Тоді |
•*вих = - ^ 0 в и х ( 1 ~ е ) = -х„^ О втпіхдіС ~~- 0 3 7 ) == хХц ц „и х • 0,63. |
|
Пм |
|
()собливості елементів визначаються також запізненням, інерційнісио та зонами нечутливості.
11 ід запізненням розуміють зсув за часом між сигналами на вході (рис. 1.27, а) і на виході елемента (рис. 1.27, б). Кількісна оцінка за-
ІІІ шення визначається різницею т = ї1 - ї2. Прикладами елементів із і ті шенням можуть бути елементи з люфтами, різні трубопроводи, в яких існує транспортне запізнення, що визначається часом про- ходження робочого тіла (води, газу, нафти і т.д.) трубопроводом.
43
Глава 1 |
ЗАГАЛЬНІ ВІДОМОСТІ ПРО СИСТЕМИ |
|
|
|
|
||||||
|
|
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
|
|
|
|
||||
|
|
і і |
|
X > |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
^вих |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
ІІ |
|
|
ш |
|
|
|
т |
|
|
|
|
|
|
і? |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
{ |
|
г,1 |
|
|
12 |
' |
|
||
|
|
|
а |
|
|
|
|
|
|
б |
|
|
|
|
Рис. |
127 |
|
|
|
|
|
|
|
Сталу часу Т, що є мірою інерційності елементів, іноді називають |
|||||||||||
інерційним |
запізненням. |
|
|
|
|
|
|
|
|
||
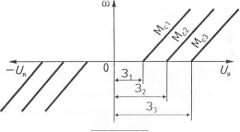
Під зоною нечутливості розуміють діапазон зміни вхідної величини, в межах якого елемент не реагує на неї. Як приклад можна навес-
|
ти реле і двигуни. |
||
|
Регулювальні |
характерис- |
|
|
тики двигуна постійного стру- |
||
|
му із зонами нечутливості Зь |
||
|
32, З3 за напруги якоря двигу- |
||
|
на £/я наведено |
на рис. 1.28. |
|
|
Величина |
зони |
нечутливості |
|
одного і того самого двигуна |
||
|
залежить від статичного мо- |
||
Рис. 128 |
менту Мс (моменту наванта- |
||
ження Мс1 |
< Мс2 |
< Мс3). |
|
1.8
Зворотні зв'язки в системах автоматичного регулювання
Як зазначалося раніше, в замкнутих системах автоматичного керування замикання системи, що дає змогу забезпечити надходження на вхід об'єкта сигналу, пропорцій-
ного вихідній величині об'єкта, виконується за допомогою головного зворотного зв'язку. Оскільки цей сигнал має подіяти на об'єкт так, аби відхилення вихідної величини об'єкта, яке з'явилося внаслідок
44
1.8.Зворотні зв 'язки
всистемах автоматичного регулювання
ні збурення, зменшилося, то головний зворотний зв'язок має бути
від'ємним. |
|
|
|
|
|
|
11 ід зворотним зв'язком розуміють та- |
|
|
||||
і <1 виконання зв'язків у системі, при яко- |
|
|
||||
му на вхід елемента Е надходить величина |
|
|
|
|||
\ „ |
пропорційна вихідній величині еле- |
|
|
|
||
|
|
33 |
||||
мента |
(рис. |
1.29). |
|
X |
|
|
|
^зв. 3 |
|
||||
С игнал зворотного зв'язку формуєть- |
|
Рис. 1.29 |
||||
ся за |
допомогою |
пристрою зворотного |
||||
ів'язку 33. |
Його |
дія визначається кое- |
|
|
||
фіцієнтом зворотного зв'язку, який визначається відношенням ВИ-
ХІДНОЇ |
величини пристрою зворотного зв'язку Х З В З до вихідної вели- |
чні пі |
елемента химх: |
х |
|
Р _ ^ЗВ.З |
(1.10) |
|
Здебільшого р< 1, проте можливі випадки, коли р> 1 (наприклад, і либокі» зворотні зв'язки в підсилювачах для здобуття релейних режимів).
Розрізняють такі зворотні зв'язки: додатні і від'ємні; жорсткі і іпучкі; головні і місцеві; за технологічним параметром (швидкості, струму, напруги тощо).
Аодатні і від'ємні зв'язки та їх вплив на коефіцієнт пе-
редачі ланки. Додатним зворотним зв'язком називають зв'язок, дія
якого збігається за знаком з дією вхідної величини наданий елемент. Якщо рівняння ланки до введення зворотного зв'язку має вигляд
Кх„ |
ВХ ' |
(1.11) |
" ВИХ " |
|
і о при наявності зворотного зв'язку фактичне значення вхідної вепічппи обчислюється за формулою
вх вх вх + рхвих ' (1.12) У цьому разі рівняння ланки, охопленої додатним зворотним
ів'язком,
ІІІІДКИ |
вих = ^Х^вх |
+ Р*вих)> |
|
|
|
|
(1 - К\3)хвих |
- Кхвх |
45
Глава 1 |
ЗАГАЛЬНІ відомості ПРО СИСТЕМИ |
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
і коефіцієнт передачі (підсилення) ланки при додатному зворотному зв'язку
хвх |
1 - К § |
Введення додатного зворотного зв'язку приводить до зростання коефіцієнта передачі (підсилення) ланки, що визначає широке застосування таких зворотних зв'язків у підсилювачах.
П р и від'ємному зворотному зв'язку |
х'іХ = хв х - (Зхиих і передаточ - |
|||
ний коефіцієнт ланки |
|
|
|
|
*звз = |
і |
К |
лгр |
О - 1 4 ) |
|
+ |
|
||
зменшуватиметься, що, як показано далі, позитивно впливає на затухання (стабілізацію) перехідних процесів.
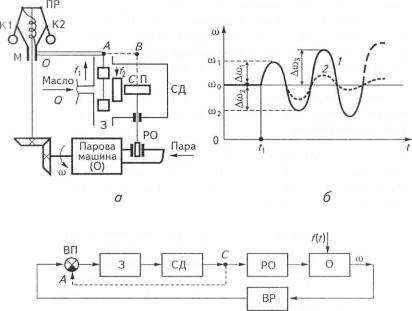
Розглянемо процес дії зворотного зв'язку на конкретному прикладі (рис. 1.30).
Принципову схему системи стабілізації швидкості со парової машини показано на рис. 1.30, а. Швидкість контролюється вимірювальним елементом, що є відцентровим регулятором ВР. При зміні швидкості со кулі К1 і К2 переміщуються вгору або вниз, діючи на пружину ПР і муфту М, яка за допомогою важіля ОА переміщує відповідним чином золотник 3. Золотник відкриває шлях надходженню масла у верхню або нижню порожнину циліндра гідравлічного серводвигуна СД.
Масло під тиском, який створює компресор (на схемі його не показано), надходить у відповідну порожнину циліндра і зумовлює переміщення поршня циліндра П і регулюючого органу РО. Зміна положення РО спричинює збільшення (або зменшення) кількості пари, що надходить до парової машини, і відповідну зміну швидкості со в напрямі стабілізації.
Якшо вважати, що в інтервалі часу 0—7, (рис. 1.30, б) машина працювала з потрібною швидкістю оо0, то золотник 3 перебував у нейтральному положенні. Якщо в момент при зменшенні навантаження швидкість збільшилася на певну величину Аоо ,, то кулі К1, К2 переміщуються вгору і через систему муфта—важіль—золотник відкривають шлях надходженню масла у верхню порожнину циліндра, що приведе до зменшення надходження пари і швидкості со. При зниженні швидкості оо, унаслідок великих моментів інерції обертових мас парової машини, після досягнення потрібного значення
46
1.8.Зворотні зв 'язки
всистемах автоматичного регулювання
в
Рис. 1.30
швидкості со0 швидкість продовжуватиме знижуватись, і негативне відхилення досягне деякого значення Дсо2. Виникне перерегулювсін- ті відхилення регульованої величини, протилежне за знаком початковому відхиленню. В результаті зменшення швидкості кулі К1 та К рухатимуться вниз, що приведе до дії системи автоматичного керування, спрямованої на підвищення швидкості. При цьому може виникнути нове відхилення швидкості від потрібного значення 0)(), що дорівнює До)3 > Дсо, (крива 7). Далі нові відхилення ставатимуть все більшими і, якщо процес не зупинити, це може призвести до авари Така САК не роботоздатна.
11 Іоб уникнути такого розвитку процесу керування, в систему до- і поі і. від'ємний зворотний зв'язок, що реалізується у вигляді мехаіпчппх елементів АВ—ВС, за допомогою яких зв'язується поршень із ішіотЇІИКОМ. За наявності такого зв'язку, показаного на рисунку
47
Глава 1 |
ЗАГАЛЬНІ відомості ПРО СИСТЕМИ |
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
штриховою лінією, на золотник 3 діятимуть два протилежно напрямлені зусилля /, і / 2 . Тому відхилення золотника в процесі керування буде меншим, ніж за відсутності вказаного зворотного зв'язку. Це дасть змогу при правильному виборі параметрів зворотного зв'язку звести коливання до затухаючих (крива 2), а всю систему зробити роботоздатною.
Функціональна схема такої САР наведена на рис. 1.30, в, де зворотний зв'язок, що охоплює гідравлічний серводвигун, показано штриховою лінією.
Жорсткі й гнучкі зворотні зв'язки. Жорсткий зворот-
ний зв'язок — це зв'язок, дія якого залежить тільки від відхилення величини на його вході (відхилення вихідної величини ланки, що охоплюється цим зворотним зв'язком) і не є функцією часу.
Гнучкий зворотний зв'язок — це
зв'язок, дія якого є функцією часу і проявляється лише в перехідних режимах. У статичних режимах такий зв'язок не діє, тому ці зв'язки іноді називають «зникаючими».
Перевага гнучких зворотних зв'язків полягає в тому, що вони не впливають (не зменшують) на статичний коефіцієнт передачі, завдяки чому, як буде показано далі, підвищується якість САК.
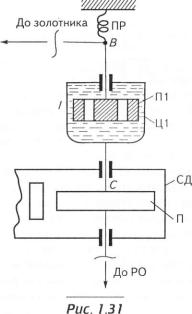
Розглянемо можливість введення гнучкого зворотного зв'язку в системі стабілізації швидкості (див. рис. 1.30, а). Для розв'язання цього завдання в розтин елемента ВС треба
ввести |
ізодром ний |
пристрій |
І |
|
(рис. 1.31) |
у вигляді циліндра ЦІ, за- |
|||
повненого |
маслом. |
Усередині |
ци- |
|
ліндра міститься поршень ПІ, механічно зв'язаний із золотником і пружиною ПР, що виконує допоміжну функцію.
Отже, зв'язок між поршнем П серводвигуна СД, жорстко зв'язаного з регулюючим органом системи РО, і золотником виконується
48
Контрольні запитання та завдання
11 рахунок взаємодії масляного середовища і поршня ПІ ізодромноіо пристрою і діє тільки у разі переміщення основного поршня. Вепичииа сил зчеплення між маслом і поршнем ПІ, яка зумовлює дію іворотного зв'язку, залежить від швидкості руху основного поршня (Іх/(Іі, а також прискорення сі2х/сії2 і є функцією часу.
За допомогою головного від'ємного зворотного зв'язку забезпечується можливість реалізації принципу керування за відхиленням.
У найбільш спрощеному вигляді функціональну схему САР, як зазначалося раніше, можна представити у вигляді сукупності двох елементів: об'єкта керування О і регулятора Р. Тому сам регулятор підносно до об'єкта керування, що забезпечує зв'язок між виходом і входом об'єкта, в деяких випадках можна умовно розглядати як при- ( грій, подібний до від'ємного зворотного зв'язку.
Контрольні запитаі я та завдання
1Чим відрізняється автоматизований процес від автоматичного і які переваги автоматизації?
2Назвіть види автоматичних пристроїв, їхні функції й особливості.
3.Назвіть основні особливості кібернетики як науки про керування.
4.Перелічіть елементи електромеханічної системи автоматичного керування і назвіть їхні функції.
5.Чим відрізняються принципи керування за відхиленням і за збуренням?
0 Що таке зворотний зв'язок, його види й особливості?
1 Перелічіть види систем автоматичного керування згідно з інформативним принципом класифікації і назвіть їхні особливості.
8Назвіть основні види й особливості кібернетичних систем автоматичного керування.
9. Зобразіть функціональні схеми систем автоматичного керування (САК) прямої і непрямої дії.
10.Зобразіть функціональну схему електромеханічної САК і позначте
вній елементи, які належать до електропривода.
11.Що є спільного і різного в поняттях: «електромеханічна система автоматичного керування», «електропривод», «регулятор»?
12.Наведіть основні характеристики елементів САК.
13.Які переваги мають гнучкі зворотні зв'язки?
14.Зобразіть функціональну схему комбінованої САК.
15.Вкажіть на головні особливості систем автоматичного керування зі змінною структурою.
16.Зобразіть функціональну схему багатоконтурної системи автоматичного керування.