

5.3.2. Первая интерполяционная формула Ньютона
Будем искать интерполяционный полином в виде:
![]() .
(5.15)
.
(5.15)
Значения
коэффициентов
![]() найдем из условия совпадения значений
исходной функции и многочлена в узлах.
Полагая
найдем из условия совпадения значений
исходной функции и многочлена в узлах.
Полагая![]() ,
из (5.15) найдем
,
из (5.15) найдем![]() ,
откуда
,
откуда![]() .
Далее последовательно придаваях
значения
.
Далее последовательно придаваях
значения
![]() и
и![]() ,
получаем:
,
получаем:
![]()
откуда
![]() ;
;
![]() ,
,
т. е.
![]() ,
,
или
![]() ,
,
откуда
![]() .
.
Затем, проведя аналогичные выкладки, можно получить
![]() .
.
В
общем случае выражение для
![]() будет иметь вид
будет иметь вид
![]() .
(5.16)
.
(5.16)
Подставляя (5.16) в выражение для многочлена (5.15), получаем
![]()
![]() (5.17)
(5.17)
Решение задачи о нахождении значений интерполяционного полинома находится в пакете MATLAB выполнением следующей последовательности действий.
1. Создать файл Newton1.m, содержащий описание функции, возвращающей локальное значение интерполяционного полинома Ньютона
% листинг файла Newton1.m
function z=Newton1(t,x,y)
% t абсцисса точки, в которой вычисляется значение интерполяционного
% полинома
% x, y координаты точек, заданных таблично
N=length(x);
for i=1:N
f(i,1)=y(i);
end;
for k=2:N
for i=1:N-k+1
f(i,k)=(f(i+1,k-1)-f(i,k-1))/(x(i+k-1)-x(i));
end;
end;
s=y(1);
for k=2:N
r=1;
for i=1:k-1
r=r.*(t-x(i));
end;
s=f(1,k)*r+s;
end;
z=s;
2. Задать табличные значения интерполируемой функции
>> N=8;
>> i=1:N;
>> x(i)=2*pi/(N-1)*(i-1);
>> y=sin(x);
3. Задать значения абсцисс точек, в которых вычисляется значение интерполяционного полинома
>> M=1000;
>> j=1:M;
>> X(j)=2*pi/(M-1)*(j-1);
>> Y=sin(X); % вычисление точных значений интерполируемой функции
4. Вычислить значения полинома Ньютона в узлах заданной координатной сетки
>> for k=1:M
Z(j)=Newton1(X(j),x,y);
end;
5. Построение разности между точным и интерполированными значениями функции (рис. 5.4)
>> plot(X,Y-Z)

Рис. 5.4. Разность между точным и интерполированными значениями функции с помощью первого полинома Ньютона
Отдавая
дань традициям преподавания численных
методов, применявшимся в прошлом веке,
приведем описание модификации формулы
(5.17), применявшуюся при ручных вычислениях.
Положим
![]() ,
т.е.
,
т.е.![]() ,
тогда:
,
тогда:
![]() ,
,
![]() ,
,
…
![]() .
.
Подставляя данные выражения в (5.17), окончательно получаем
![]()
![]() .
(5.18)
.
(5.18)
Формула (5.18) называется первой интерполяционной формулой Ньютона. Данная формула применяется для интегрирования в начале отрезка, когда t мало по абсолютной величине.
5.3.3. Вторая интерполяционная формула Ньютона
Когда значение аргумента находится ближе к концу отрезка интерполяции, используется вторая интерполяционная формула Ньютона, которая получается, если отыскивать интерполяционный полином в виде:
![]() .
(5.19)
.
(5.19)
Коэффициенты полинома (5.19), находятся из условия совпадения значений функции и интерполяционного многочлена в узлах:
![]() .
(5.20)
.
(5.20)
Подставив
(5.20) в (5.19) и перейдя к переменной
![]() ,
получим окончательный вид интерполяционной
формулы Ньютона, используемой при ручных
вычислениях:
,
получим окончательный вид интерполяционной
формулы Ньютона, используемой при ручных
вычислениях:
 .
(5.21)
.
(5.21)
В пакете MATLAB решение задачи о нахождении значений интерполяционного полинома находится выполнением следующей последовательности действий.
1. Создать файл Newton2.m, содержащий описание функции, возвращающей локальное значение интерполяционного полинома Ньютона
% листинг файла Newton2.m
function z=Newton2(t,x,y)
N=length(x);
for i=1:N
f(i,1)=y(i);
end;
for k=2:N
for i=1:N-k+1
f(i,k)=(f(i+1,k-1)-f(i,k-1))/(x(i+k-1)-x(i));
end;
end;
s=y(1);
for k=1:N
r=1;
for i=1:k-1
r=r*(t-x(N-i));
end;
s=f(N-k,k)*r+s
end;
z=s;
2. Задать табличные значения интерполируемой функции
>> N=8;
>> i=1:N;
>> x(i)=2*pi/(N-1)*(i-1);
>> y=sin(x);
3. Задать значения абсцисс точек, в которых вычисляется значение интерполяционного полинома
>> M=1000;
>> j=1:M;
>> X(j)=2*pi/(M-1)*(j-1);
>> Y=sin(X); % вычисление точных значений интерполируемой функции
4. Вычислить значения полинома Ньютона в узлах заданной координатной сетки
>> for k=1:M
Z(j)=Newton1(X(j),x,y);
end;
5. Построение разности между точным и интерполированными значениями функции (рис. 5.5)
>> plot(X,Y-Z)
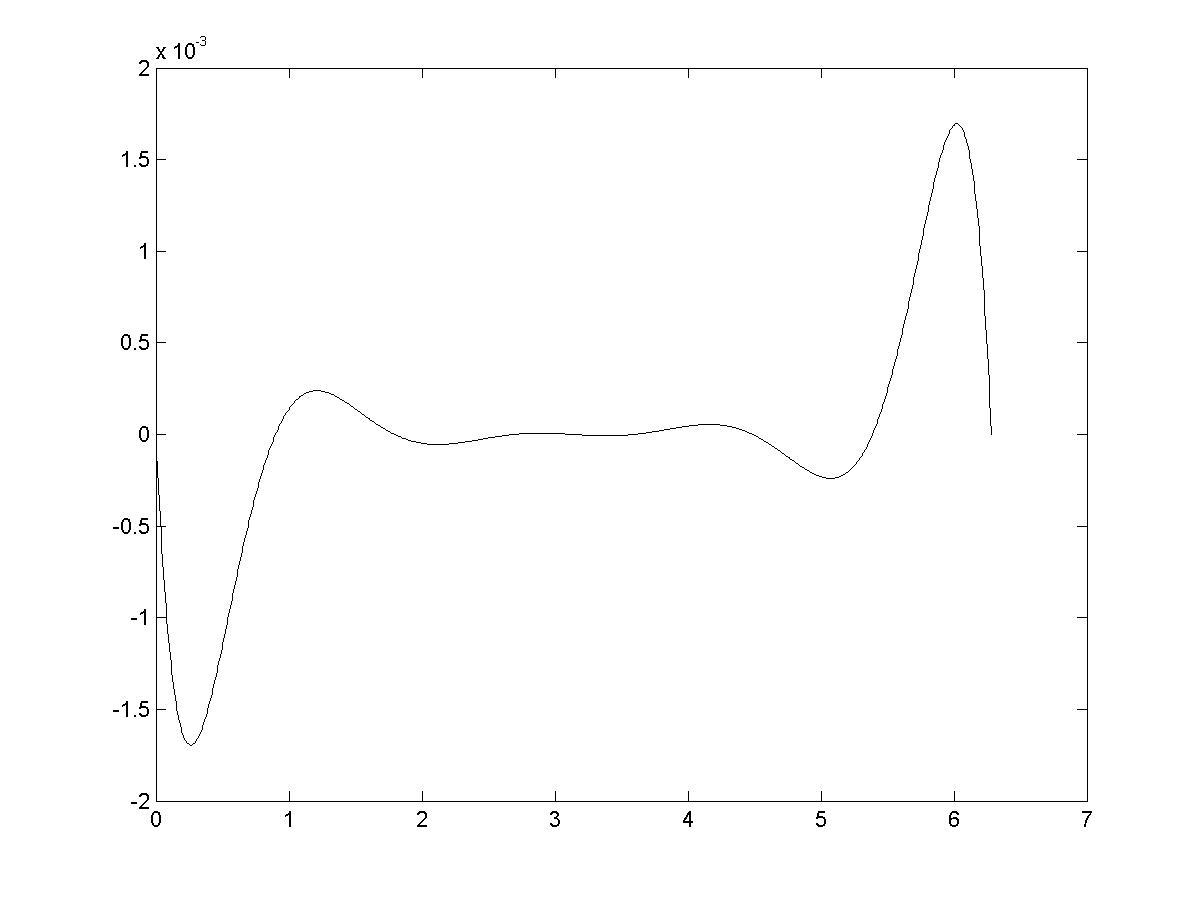
Рис. 5.5. Разность между точным и интерполированными значениями функции с помощью второго полинома Ньютона