

Лекция № 4. Методы решения систем нелинейных уравнений
ПЛАН
4.1. Векторная запись нелинейных систем. Метод простых итераций
4.2. Метод Ньютона решения систем нелинейных уравнений
4.3. Решение нелинейных систем методами спуска
4.4. Решение систем нелинейных уравнений средствами пакета MATLAB
4.1. Векторная запись нелинейных систем. Метод простых
итераций
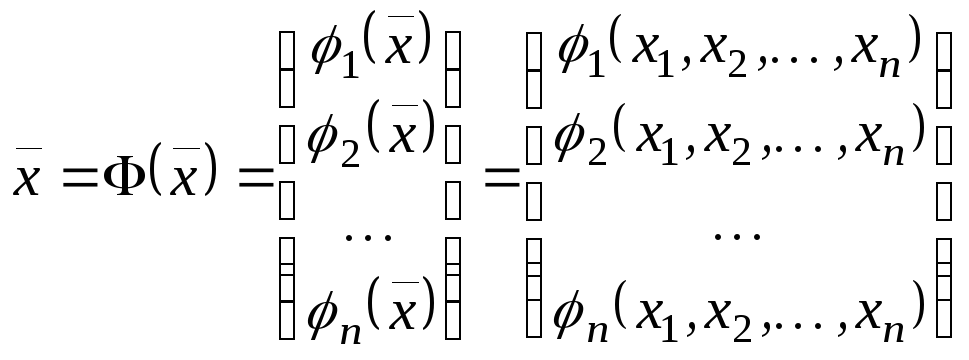
Пусть требуется решить систему уравнений
 (4.1)
(4.1)
где
![]()
заданные, вообще говоря, нелинейные
вещественнозначные функции n
вещественных переменных
заданные, вообще говоря, нелинейные
вещественнозначные функции n
вещественных переменных
![]() .
.
Введя обозначения
 ,
,
 ,
,
 ,
,
систему (4.1) можно заменить одним уравнением
![]() (4.2)
(4.2)
относительно
векторной функции F
векторного аргумента
![]() .
.
Таким
образом, исходную задачу можно
рассматривать как задачу о нулях
нелинейного отображения
![]() .
В такой постановке данная задача является
прямым обобщением задачи о нахождении
решения нелинейного уравнения для
случая пространств большей размерности.
Это означает, что можно строить методы
ее решения, как на основе обсужденных
в предыдущей лекции подходов, так и
осуществлять формальный перенос
выведенных для скалярного случая
расчетных формул. Однако не все результаты
и не все методы оказывается возможным
перенести формально (например, метод
половинного деления). В любом случае
следует позаботиться о правомерности
тех или иных операций над векторными
переменными и векторными функциями, а
так же о сходимости получаемых таким
способом итерационных процессах.
Отметим, что переход отn
= 1 к n
2 вносит в задачу нахождения нулей
нелинейного отображения свою специфику,
учет которой привел к появлению новых
методов и различных модификаций уже
имеющихся методов. В частности, большая
вариативность методов решения нелинейных
систем связана с разнообразием способов
которыми можно решать линейные
алгебраические задачи, возникающие при
пошаговой линеаризации данной нелинейной
вектор-функции
.
В такой постановке данная задача является
прямым обобщением задачи о нахождении
решения нелинейного уравнения для
случая пространств большей размерности.
Это означает, что можно строить методы
ее решения, как на основе обсужденных
в предыдущей лекции подходов, так и
осуществлять формальный перенос
выведенных для скалярного случая
расчетных формул. Однако не все результаты
и не все методы оказывается возможным
перенести формально (например, метод
половинного деления). В любом случае
следует позаботиться о правомерности
тех или иных операций над векторными
переменными и векторными функциями, а
так же о сходимости получаемых таким
способом итерационных процессах.
Отметим, что переход отn
= 1 к n
2 вносит в задачу нахождения нулей
нелинейного отображения свою специфику,
учет которой привел к появлению новых
методов и различных модификаций уже
имеющихся методов. В частности, большая
вариативность методов решения нелинейных
систем связана с разнообразием способов
которыми можно решать линейные
алгебраические задачи, возникающие при
пошаговой линеаризации данной нелинейной
вектор-функции
![]() .
.
Начнем изучение методов решения нелинейных систем с метода простых итераций.
Пусть система (4.1) преобразована к следующей эквивалентной нелинейной системе
 (4.3)
(4.3)
или в компактной записи:
 .
(4.4)
.
(4.4)
Для
этой задачи о неподвижной точке
нелинейного отображения
![]() запишем формальное рекуррентное
равенство
запишем формальное рекуррентное
равенство
![]() ,
(4.5)
,
(4.5)
где
![]() ,
которое определяет метод простых
итераций для задачи (4.3).
,
которое определяет метод простых
итераций для задачи (4.3).
Если
начать процесс построения последовательности
![]() с некоторого вектора
с некоторого вектора![]() и продолжить вычислительный процесс
по формуле (4.5), то при определенных
условиях данная последовательность со
скоростью геометрической прогрессии
будет приближаться к вектору
и продолжить вычислительный процесс
по формуле (4.5), то при определенных
условиях данная последовательность со
скоростью геометрической прогрессии
будет приближаться к вектору![]()
неподвижной точке отображения
неподвижной точке отображения
![]() .
.
Справедлива следующая теорема, которую мы приводим без доказательства.
Теорема
4.1. Пусть
функция
![]() и замкнутое множество
и замкнутое множество
![]() таковы, что:
таковы, что:
1)
![]()
![]() ;
;
2)
![]() :
:![]()
![]() .
.
Тогда
![]() имеет в M
единственную неподвижную точку
имеет в M
единственную неподвижную точку
![]() ;
последовательность
;
последовательность
![]() ,
определяемая (4.5), сходится при любом
,
определяемая (4.5), сходится при любом
![]() к
к![]() и справедливы оценки
и справедливы оценки
![]()
![]() .
.
Отметим
низкую практическую ценность данной
теоремы из-за неконструктивности ее
условий. В случаях, когда выбрано хорошее
начальное приближение
![]() решению
решению
![]() ,
больший практический интерес представляет
следующая теорема.
,
больший практический интерес представляет
следующая теорема.
Теорема
4.2. Пусть
![]() дифференцируема в замкнутом шаре
дифференцируема в замкнутом шаре
![]() ,
причем
,
причем![]()
![]() .
Тогда если центр
.
Тогда если центр![]() и радиус
и радиус![]() шараS
таковы, что
шараS
таковы, что
![]() ,
то справедливо заключение теоремы 4.1 с
,
то справедливо заключение теоремы 4.1 с![]() .
.
Запишем метод последовательных приближений (4.5) в развернутом виде:
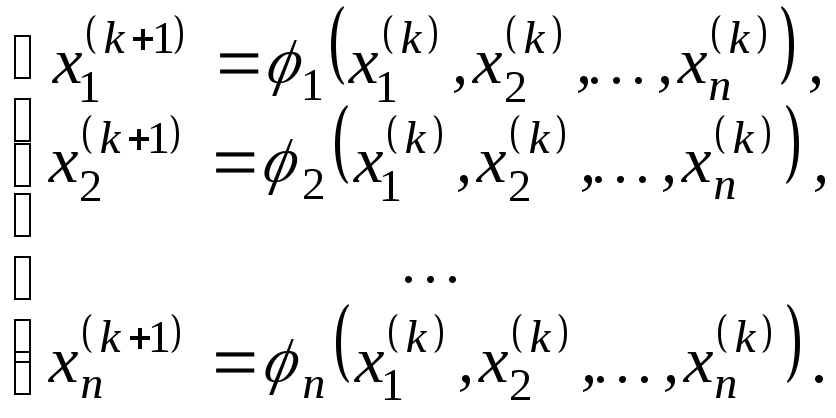 (4.6)
(4.6)
Сравнение (4.6) с вычислительной формулой метода простой итерации решения систем линейных уравнений (4.13) обнаруживает их сходство. Учитывая, что в линейном случае, как правило, более эффективным является метод Зейделя, в данном случае также может оказаться более эффективным его многомерный аналог, называемый методом покоординатных итераций:
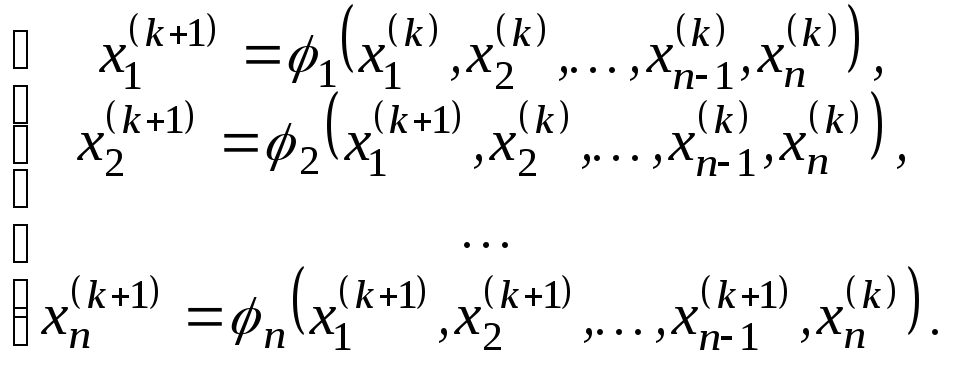 (4.7)
(4.7)
Заметим,
что как и для линейных систем, отдельные
уравнения в (4.7) неравноправны, т.е.
перемена местами уравнений системы
(4.3) может изменить в некоторых пределах
число итераций и вообще ситуацию со
сходимостью последовательности итераций.
Для того чтобы применить метод простых
итераций (4.6) или его зейделеву модификацию
(4.7) к исходной системе (4.1), необходимо
сначала тем или иным способом привести
эту систему к виду (4.3). Это можно сделать,
например, умножив (4.2) на неособенную
n n
матрицу A
и прибавив к обеим частям уравнения
![]() вектор неизвестных. Полученная система
вектор неизвестных. Полученная система
![]() (4.8)
(4.8)
эквивалентна исходной и имеет вид, аналогичный уравнению в методе итераций в одномерном случае. Проблема состоит лишь в правильном подборе матричного параметра.