

4.4. Решение систем нелинейных уравнений средствами пакета matlab
Найдем решение системы нелинейных уравнении
![]() ,
,
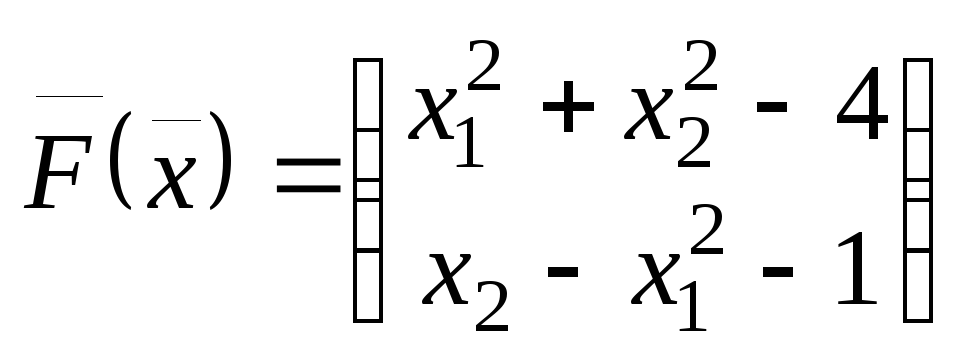
которая может быть записана в векторном виде
![]() ,
,
где
 ,
,
 ,
,
средствами пакета MATLAB.
Для этого необходимо выполнить следующую последовательность действий:
1.
Создать файла fm.m,
содержащий описание функции, возвращающей
значения функции
![]() .
.
% листинг файла fm.m
function z=fm(x)
z(1,1)=x(1).^2+x(2)^2-4;
z(2,1)=x(2)-x(1)^2-1;
2. Задать вектор начального приближения
>> z(1,1)=1;
>> z(2,1)=1;
3. Обратиться к встроенной функции fsolve( ), возвращающей решение системы нелинейных уравнений
>> x = fsolve('fm',z,optimset('fsolve'))
Optimization terminated successfully:
Relative function value changing by less than OPTIONS.TolFun
% Процесс оптимизации завершен
% Относительная величина изменения функции меньше, чем переменная
% OPTIONS.TolFun
x =
0.8895
1.7913
4. Проверка полученного решения
>> fm(x)
ans =
1.0e-008 *
0.5162
-0.4888
Для одновременного вывода координат вектора решения уравнения и соответствующего значения вектор-функции следует выполнить команду:
>> [x fval] = fsolve('fm',z,optimset('fsolve'))
Optimization terminated successfully:
Relative function value changing by less than OPTIONS.TolFun
x =
0.8895
1.7913
fval =
1.0e-008 *
0.5162
-0.4888
Для
вывода на экран монитора значений
вектора-решения и соответствующего
значения функции
![]() следует выполнить команду:
следует выполнить команду:
>> [x fval exitflag] = fsolve('fm',z,optimset('Display','Iter'));
Norm of First-order
Iteration Func-count f(X) step optimality cg-iterations
1 4 5 1 5 0
2 7 1 1 4 1
3 10 0.0026 0.223607 0.17 1
4 13 4.53078e-008 0.013546 0.00055 1
5 16 5.05378e-017 7.18274e-005 1.79e-008 1
Optimization terminated successfully:
Relative function value changing by less than OPTIONS.TolFun
В ряде случаев оказывается более удобным использовать метод Ньютона, в котором, как описано в разделе 4.2, необходимо знать в данной точке и значения функции, и значения якобиана, что позволяет реализовать итерационный процесс. Реализация метода Ньютона в пакете MATLAB реализуется следующей последовательностью действий.
1.
Создать файла Fm1.m,
содержащий описание функции, возвращающую
одновременно значения функции
![]() и значения якобиана
и значения якобиана
% листинг файла Fm1.m
function [z,J]=fm(x)
z(1,1)=x(1).^2+x(2)^2-4;
z(2,1)=x(2)-x(1)^2-1;
J(1,1)=2*x(1);
J(1,2)=2*x(2);
J(2,1)=-2*x(1);
J(2,2)=1;
2. Включить режим использования метода Ньютона и отображения итерационного процесса на экране
>> options=optimset('Jacobian','on','Display','Iter');
3. Обратиться к встроенной функции fsolve( ), возвращающей решение системы нелинейных уравнений
>> [x fval exitflag] = fsolve('fm1',z,options);
Norm of First-order