

Эффект Пельтье и Ранка-Хильша
Свойства и термодинамика хладагентов и растворов
Вириальные уравнения Боголюбова – Майера
Теоретические циклы холодильных машин бытового назначения
Теоретический процесс работы поршневого и ротационного компрессора
Динамика кривошипно-шатунного и кулисного механизмов
Динамика клапанов
Теория теплообмена в бытовой холодильной технике
Теплоотдача при кипении жидкости и конденсации пара
Тепло- и массообмен с влажным воздухом
Аналитические и графоаналитические методы расчета
Изменение состояния воздуха в процессе кондиционирования
Побочные процессы в бытовых машинах и приборах
В бытовых машинах и приборах при выполнении ими основных функций протекают побочные процессы, которые в большинстве случаев являются вредными. К побочным процессам относятся вибрация машин, шум, излучение радиопомех, изнашивание деталей, коррозия металлов, тепло- газовыделение и др. Борьба с побочными процессами является не менее важной задачей, чем достижение высоких функциональных характеристик бытовых машин и приборов. Рассмотрим некоторые побочные процессы и меры по их подавлению.
Вибрация
Вибрация представляет собой малые механические колебания, возникающие в телах под действием переменного физического поля. Для бытовых машин характерна вибрация, источником которой являются вращающиеся элементы, несбалансированные относительно оси, или элементы, совершающие возвратно-поступательные движения. В бытовой технике вибрация, как правило, относится к вредным явлениям. Исключение составляют случаи, когда вибрация создается искусственно (вибромассажеры, перфораторы, некоторые типы электрических бритв).
Отрицательная роль вибрации машин и приборов заключается в следующем:
1) сокращается срок службы и повышается частота появления неисправностей в конструкции машины под действием дополнительных инерционных сил и смещений;
2) пользователь бытовой машины испытывает дискомфорт, связанный с неприятным ощущением вибрации;
3) высокочастотная вибрация вызывает шум.
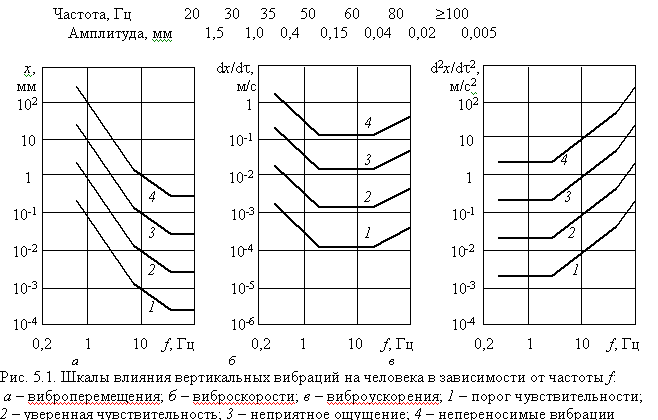
К параметрам вибрации относятся: виброперемещение x, виброскорость dx/d, виброускорение d2x/d2 и частота вибрации f.
Физиологические исследования показывают, что вибрации инфразвуковых и звуковых частот вызывают утомляемость, ухудшают состояние нервной системы пользователя. Представляют интерес данные [21], характеризующие восприятие вертикальных вибраций человеком (рис 5.1).
Для стационарных и ручных бытовых машин в качестве предельно допустимых можно принять следующие амплитуды вибрации:
Колебания механических систем
В простейшем идеальном виде вибрация представляет собой гармоническое колебание. Для точки, принадлежащей телу и находящейся в плоскости колебаний, проекция точки на одну из осей описывается уравнением
x = A sin (
где А – амплитуда; - круговая частота; - время; - начальная фаза.
Гармоническое колебание имеет постоянный период T = 2/. Величина f = 1/T = /2 называется частотой. Период вибрации будет постоянным, если ее вызывает элемент механизма, вращающийся с постоянной частотой и переменным, если вращение происходит с ускорением (разгон) или с замедлением (торможение).
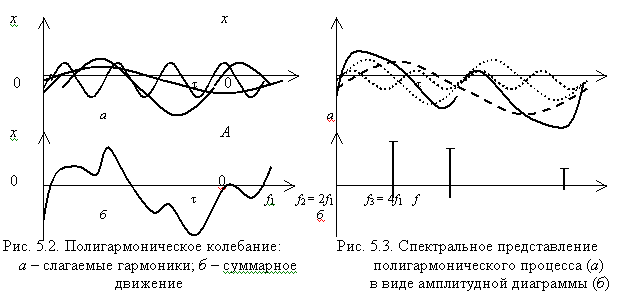
Механизм машины может иметь несколько источников колебаний с различной частотой. Если все частоты кратны, то процесс колебания носит название полигармонического. Полигармоническое колебание (рис. 5.2) слагается из нескольких гармонических колебаний. Каждая отдельная слагающая называется гармоникой. Совокупность частот всех гармоник, вхо-дящих в суммарное движение, называется спектром частот процесса (рис. 5.3).
Реальная бытовая машина представляет собой сложную колебательную систему, в которой каждая деталь как деформируемое тело совершает колебательное движение. Показать закономерности вибраций можно на простейшей колебательной системе (рис. 5.4).
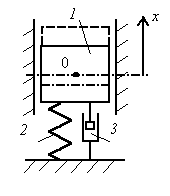
Рис. 5.4. Колебательная система:
1-груз; 2-пружина; 3-демпфер.
Если тело массой m вывести из состояния равновесия и отпустить, то оно придет в движение. Векторное уравнение сил, действующих на тело, будет иметь вид
Р1 + Р2 + Р3 = 0.
Здесь Р1=cx, где c–жесткость пружины (примем с=const);
P2 = k (dx/d), где k – коэффициент сопротивления, вызванного трением ( k = const); - время; Р3 = m(d2x/d2).
Следовательно, движение тела в колебательной системе
данного типа можно описать в виде однородного линей-
ного дифференциального уравнения
m(d2x/d2) + k (dx/d) + cx = 0 или, в канонической форме
d2x/d2 + 2 (dx/d) + 02x = 0, (5.1)
где
= k/(2m)
– коэффициент затухания; 0
=![]() – круговая частота собственных
колебаний.
– круговая частота собственных
колебаний.
Если на тело начинает действовать внешняя сила Р = P0 cos , изменяющаяся по гармоническому закону с круговой частотой , то уравнение (5.1) дополнится и примет вид
d2x/d2 + 2 (dx/d) + 02x = (P0 /m)cos . (5.2)
Уравнение (5.2) описывает движение многих реальных колебательных систем, для которых схема, представленная на рис. 5.4, может рассматриваться как принципиальная.
Решение неоднородного уравнения (5.2) дает
x
= (exp(-))(C1exp(![]() )
C2
exp(-
)
C2
exp(-![]() ))
+ A
cos
(
.
))
+ A
cos
(
.
Первый член этого выражения описывает свободные затухающие колебания. Их совершает тело, выведенное из состояния равновесия. Постоянные интегрирования С1 и С2 определяются начальными условиями – значениями x и dx/d в момент = 0. Второй член описывает стационарные вынужденные колебания, происходящие с частотой внешней силы, амплитудой
![]() (5.3)
(5.3)
и сдвигом фазы относительно внешней силы
= arctg (2/(02 - 2)).
Стационарные вынужденные колебания тело совершает в установившемся режиме после затухания собственных колебаний.
Формулу (5.3) можно представить в виде
A = xст = (Р0/c),
где - коэффициент динамичности, показывающий, во сколько раз амплитуда вынужденных колебаний отличается от статического смещения xст, которое получило бы тело от силы Р0,
![]() или
или
![]()
Коэффициент динамичности зависит от отношения частот = и безразмерного коэффициента затухания / (рис. 5.5). При = 1 и слабом затухании наблюдается резонанс, выражающийся в резком росте амплитуды вынужденных колебаний.
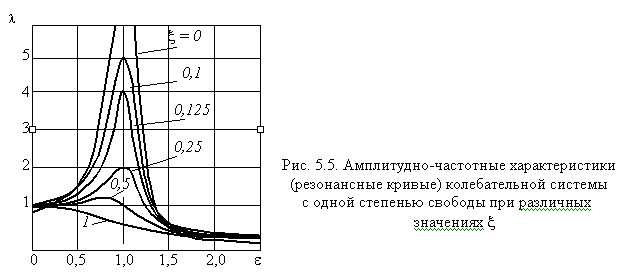
Таким образом, для уменьшения амплитуды вибрации колебательной системы следует:
1) уменьшать силу, вызывающую колебания;
2) увеличивать массу колебательной системы;
3) не допускать резонансных явлений, когда = 0;
4) усиливать демпфирующие свойства колебательной системы.