

54. Влияние параметров на свойство и механическую характеристику ад
Влияние параметров на механическую характеристику АД будем оценивать через критический момент (3.235), критическое скольжение (3.232) и скорость ротора
(3.235)
(3.232)
 :
:
1)

Очевидно,
что критическое скольжение не меняется,
следовательно, критическая скорость
 ,
а критический момент пропорционален
квадрату напряжения. Характеристики
показаны на рис.3.59.
,
а критический момент пропорционален
квадрату напряжения. Характеристики
показаны на рис.3.59.

2)

С увеличением R1 (или X1) критическое скольжение уменьшается, критическая скорость wk увеличивается, а критический момент уменьшается (рис.3.60).

3)

Критический
момент не изменяется, а критическое
скольжение изменяется пропорционально
 (рис.3.61).
(рис.3.61).

4)

Чтобы оценить влияние изменения частоты, примем во внимание, что
 ,
,
 .
.
При R1=0 имеем
 ,
,

т.е. синхронная скорость АД увеличивается пропорционально увеличению частоты, критическое скольжение уменьшается обратно пропорционально частоте, а критический момент уменьшается обратно пропорционально квадрату частоты (рис.3.62).

Уменьшать
частоту при
 нельзя, так как это приведет к увеличению
магнитного потока Фm
и чрезмерному насыщению магнитной
системы двигателя. С уменьшением f1
необходимо одновременно уменьшать и
напряжение U1
, чтобы насыщение машины находилось в
допустимых пределах.
нельзя, так как это приведет к увеличению
магнитного потока Фm
и чрезмерному насыщению магнитной
системы двигателя. С уменьшением f1
необходимо одновременно уменьшать и
напряжение U1
, чтобы насыщение машины находилось в
допустимых пределах.
53. Электромеханические характеристики ад.
В связи с тем, что при скольжении, большем критического, ток АД продолжает возрастать, а момент начинает уменьшаться, для АД важна электромеханическая характеристика, выражаемая через ток ротора и/или статора

Для
тока ротора I эта характеристика имеет параметрическое
выражение:
эта характеристика имеет параметрическое
выражение:
 (3.249)
(3.249)
Для (3.249) имеем характерные точки (рис. 3.57, сплошная кривая):
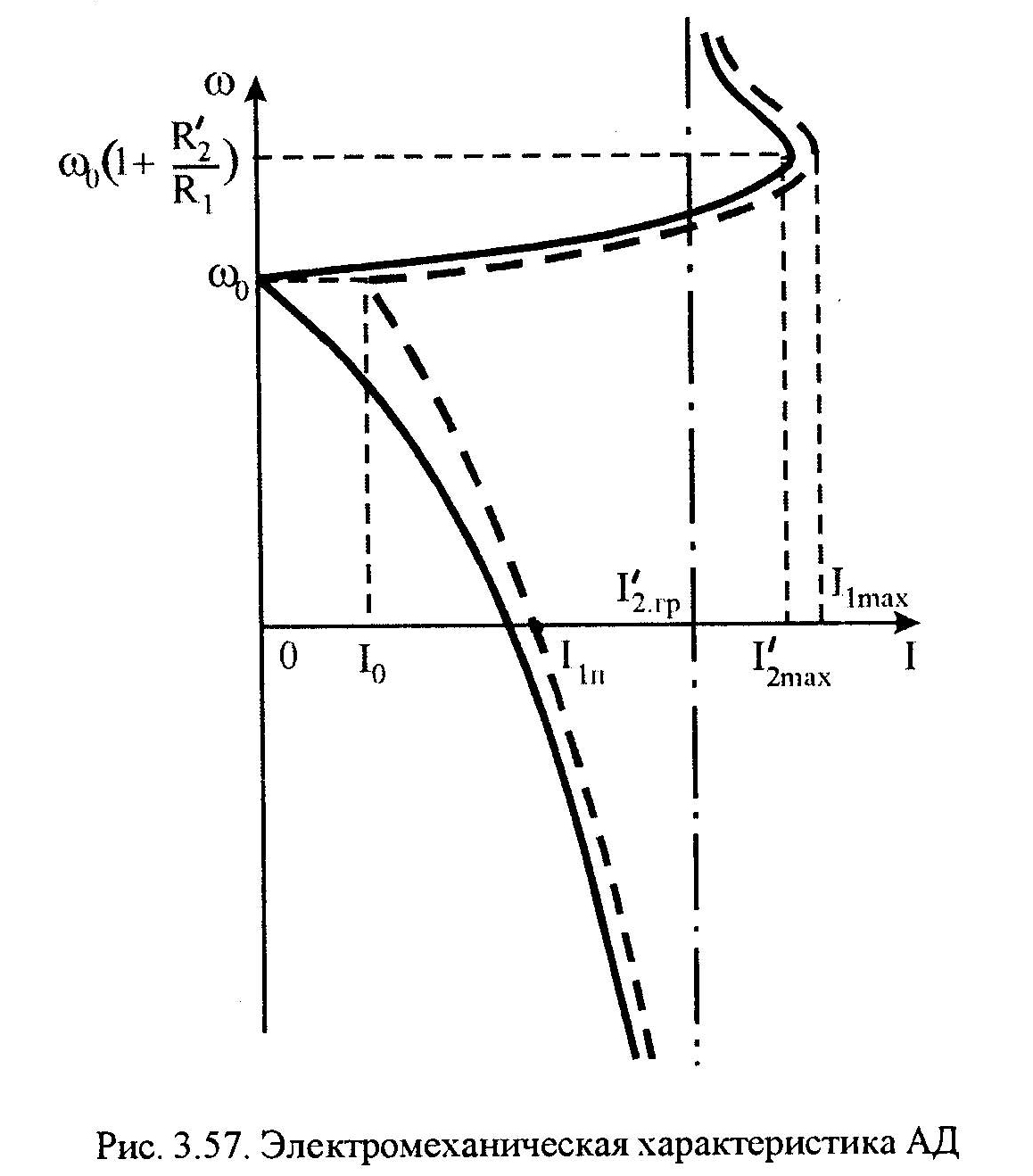
s=0;
 ;
w=w0;
;
w=w0;s=-
 ;
;
 ;
w=w0(1+
);
;
w=w0(1+
);s=1;
 ;
w=0;
;
w=0;s;
 ;
w.
;
w.
Получить зависимость w=f(I1) можно, преобразуя Т-образную эквивалентную схему рис. 3.53 в схему с последовательным соединением комплексных сопротивлений (рис.3.58).

Обозначим:
 (3.250)
(3.250)
тогда “внутреннее” комплексное сопротивление АД
 (3.251)
(3.251)
При подстановке (3.250) в (3.251) и последующих преобразованиях находим:
 (3.252)
(3.252)
Эквивалентное сопротивление цепи АД при данном скольжении s:
 , (3.253)
, (3.253)
где
 (3.254)
(3.254)
Ток статора I1 при данном скольжении s определяется как
 ,(3.255)
а скорость ротора w=w0(1-s).
,(3.255)
а скорость ротора w=w0(1-s).
Рассмотрим характерные точки для (3.255):
s=0; Rв(s)=0; RАД=R1;Xв(s)=X; XАД=X1+X.
 .
.s; Rв(s)0; Xв(s)
 ;.
RАД=R1;
;.
RАД=R1;
 .
.
 .
.
s=1;
 ;
;
 ;
RАД=R1+Rв;
XАД=X1+Xв;
;
RАД=R1+Rв;
XАД=X1+Xв;

Приближенно действующее значение тока статора АД можно определить по формуле профессора В.А.Шубенко:
 (3.256)
(3.256)
где
 . (3.257)
. (3.257)
 – скольжение на
расчетной (искусственной) характеристике
при M=Mном,
– скольжение на
расчетной (искусственной) характеристике
при M=Mном,
M,s – текущие значения электромагнитного момента и скольжения.
Критическое скольжение можно найти, решая уравнение (3.241) при =ном и =1:
 ,(3.258)
где
,(3.258)
где

При R1=0 (a=0) уравнение (3.258) принимает вид:
 (3.259)Ток холостого
хода АД можно определить и по другой,
более простой эмпирической формуле
(3.259)Ток холостого
хода АД можно определить и по другой,
более простой эмпирической формуле
 (3.260)
(3.260)