

1.Классфификация кинематических цепей
Номинальная мощность электродвигателя Рном определяется выражением
Рном=Мномном , (1.1)
где Мном , ном – номинальные вращающий момент и угловая скорость ротора.
В свою очередь
Мном=СкD l (1.2)
l (1.2)
где
Ск – коэффициент, зависящий от конструктивных особенностей электрической машины,
D – диаметр якоря,
L – длинна активной части якоря.
Отсюда следует, что для уменьшения габаритов электродвигателя (D l) при заданной номинальной мощности Рном необходимо увеличивать угловую скорость ном , особенно для маломощных двигателей (ном=100 – 600 рад/с). В тоже время для рабочих машин по технологическим условиям требуется значительно меньшая скорость, примерно, в 10 – 100 раз меньшая. Согласование механических параметров электродвигателя (скорости и момента) с механическими параметрами рабочей машины осуществляется с помощью передаточного механизма (ПМ). При этом ПМ могут изменять не только количественные параметры механической энергии, но и характер движения, преобразуя вращательное движение в поступательное.
Р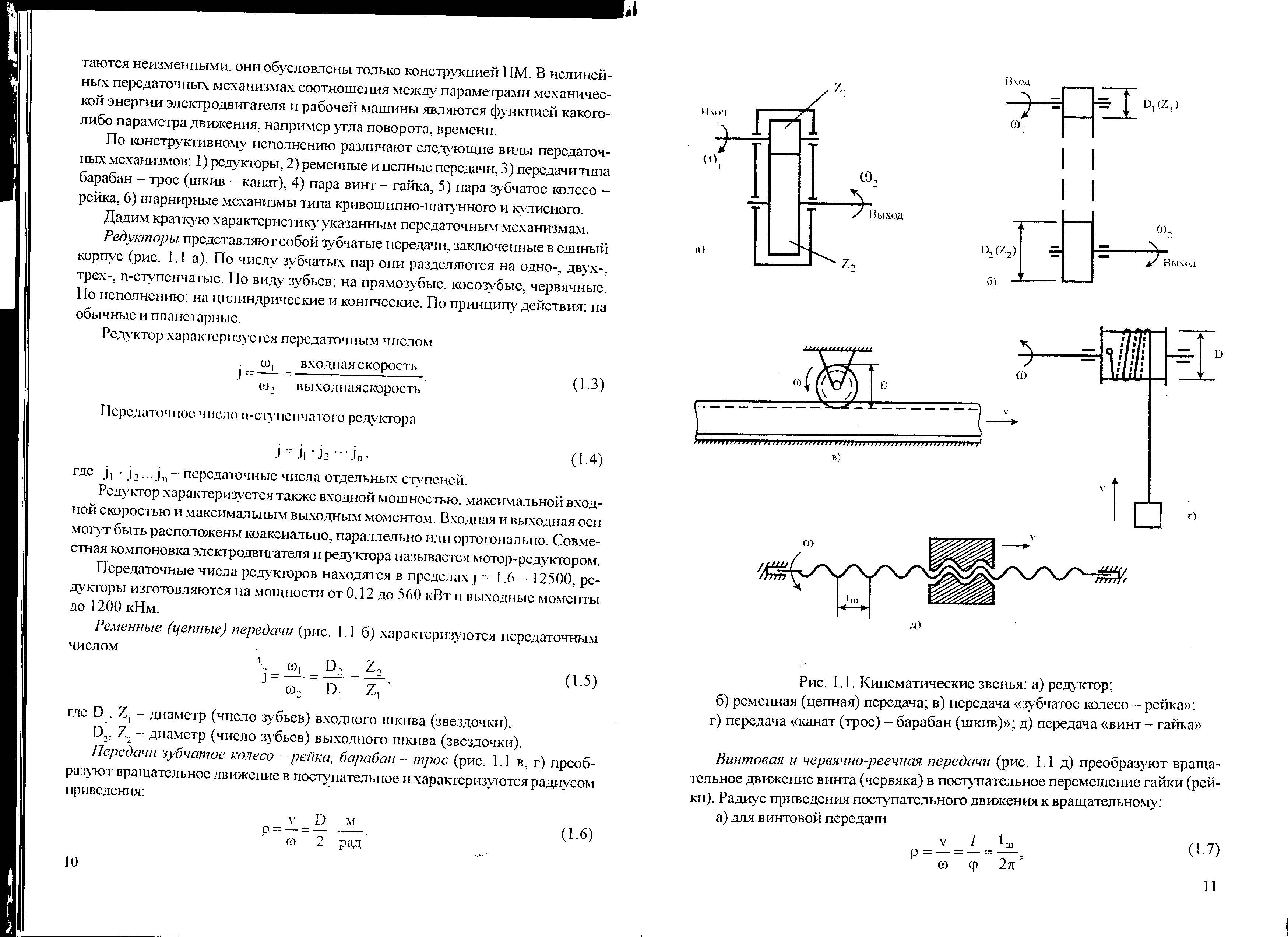 едукторы
представляют собой зубчатые передачи,
заключенные в единый корпус (Рис.1.1а).
По числу зубчатых пар они разделяются
на одно-, двух-, трех-, n-ступенчатые.
По виду зубьев: на прямозубые, косозубые,
червячные. По исполнению: на цилиндрические
и конические. По принципу действия: на
обычные и планетарные.
едукторы
представляют собой зубчатые передачи,
заключенные в единый корпус (Рис.1.1а).
По числу зубчатых пар они разделяются
на одно-, двух-, трех-, n-ступенчатые.
По виду зубьев: на прямозубые, косозубые,
червячные. По исполнению: на цилиндрические
и конические. По принципу действия: на
обычные и планетарные.
Редуктор характеризуется передаточным числом
Совместная компоновка электродвигателя и редуктора называется мотор-редуктором.
Передаточные
числа редукторов находятся в пределах
 =1,6
– 12500. редукторы изготовляются на
мощности от 0,12 до 560 кВт и выходные
моменты до 1200кНм.
=1,6
– 12500. редукторы изготовляются на
мощности от 0,12 до 560 кВт и выходные
моменты до 1200кНм.
Ременные (цепные) передачи (Рис.1.1б) характеризуются передаточным числом
где D1, Z1 – диаметр (число зубьев) входного шкива (звездочки),
D2, Z2 – диаметр (число зубьев) выходного шкива (звездочки).
П ередачи зубчатое колесо-рейка, барабан-трос преобразуют вращательное движение в поступательное и характеризуются радиусом приведения


В интовая и червячно-реечная передачи преобразуют вращательное движение винта (червяка) в поступательное перемещение гайки (рейки). Радиус приведения поступательного движения к вращательному:
а) для винтовой передачи
 ,
,
б) для червячно-реечной передачи

где
l,
 – линейные перемещения и скорость,
– линейные перемещения и скорость,
 ,
,
 – угловые перемещения и скорость,
– угловые перемещения и скорость,
 ,
,
 – шаг винта и шаг рейки,
– шаг винта и шаг рейки,
 –
число заходов червяка.
–
число заходов червяка.
Кривошипно-шатунный механизм (Рис.1.2а) служит для преобразования вращательного движения кривошипа в возвратно-поступательное движение ползуна или, наоборот, возвратно-поступательного движения ползуна во вращательное движение кривошипа. Радиус приведения

является функцией угла поворота кривошипа.
Кулисный механизм (Рис.1.2б) предназначен для преобразования качательного движения кулисы в поступательное движение ползуна или, наоборот, поступательного движения ползуна в качательное движение кулисы.
Радиус приведения здесь выражается (1.9), т.е. он является функцией угла поворота кулисы.
