

П
Рисунок
8.15 - Y
– образные
cosφ
=f(Iвг)
при параллельной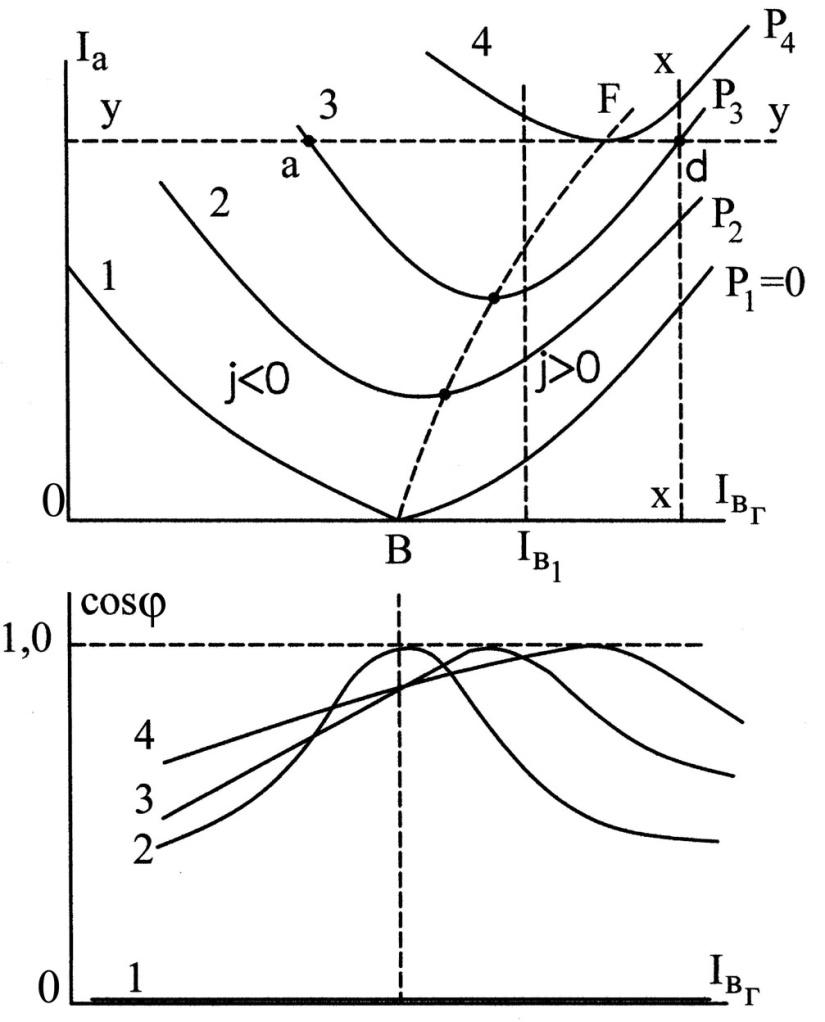
Характеристики и зависимости
Работе сг с сетью
унктирная линия BF,
проходящая через минимумы V - образных
характеристик, представляет собой
регулировочную характеристику генератора
при чисто активной нагрузке. Вправо от
нее лежит область перевозбуждения
генератора, влево – область недовозбуждения.
Семейство
V
- образных характеристик позволяет
оценить изменение режима параллельной
работы СГ с сетью в процессе изменения
активной мощности при постоянном токе
возбуждения. Для этого при определенном
значении тока возбуждения, например
при
![]() ,
проводят вертикальную линию и в точках
ее пересечения с кривыми 2, 3, и т.д.
определяют, как изменяется ток якоря
Ia
и cosφ
генератора при увеличении нагрузки.
,
проводят вертикальную линию и в точках
ее пересечения с кривыми 2, 3, и т.д.
определяют, как изменяется ток якоря
Ia
и cosφ
генератора при увеличении нагрузки.
Для каждого синхронного генератора существуют определенные
предельные значения тока возбуждения и тока нагрузки. На рисунке
8.15
они обозначеныпунктирными ограничительными
линиями, соответственно х – х и у – у.
Эти линии означают, что при мощности,
например,
![]() можно работать на V -образной характеристике
от точки «а» до точки «d»
и машина не будет перегружена. Левее
точки «a»
ток якоря будет больше номинального и
будет перегреваться статор, правее
точки «d»
и ток статора и ток возбуждения больше
номинальных и будет перегреваться также
обмотка ротора. При нагрузке, равной
можно работать на V -образной характеристике
от точки «а» до точки «d»
и машина не будет перегружена. Левее
точки «a»
ток якоря будет больше номинального и
будет перегреваться статор, правее
точки «d»
и ток статора и ток возбуждения больше
номинальных и будет перегреваться также
обмотка ротора. При нагрузке, равной
![]() (кривая 4), обмотка статора не будет
греться только при cosφ=1.
(кривая 4), обмотка статора не будет
греться только при cosφ=1.
В заключение отметим, что на вид V – образных характеристик оказывает влияние величина сопротивления xc; чем меньше xc тем острее получаются эти характеристики. Наоборот, чем больше синхронное индуктивное сопротивление генератора xc, тем более пологий характер имеют V – образные кривые. Связано это с тем, что в первом случае даже незначительные изменения возбуждения вызывают резкое возрастание тока статора, во втором случае при изменении тока возбуждения изменение тока якоря происходит более плавно, что дает преимущества эксплуатационного характера. В то же время синхронные машины с малым сопротивлением xc имеют большую перегрузочную способность.
8.8. Перевод синхронной машины в двигательный
режим работы
Выше мы отмечали, что синхронная машина как и все другие электромеханические преобразователи энергии, обратима, т.е. может работать в режиме генератора или двигателя в зависимости от того, с какой стороны к ней подводится энергия – механическая с вала (это генераторный режим), или электрическая от сети (это двигательный режим).
При
параллельной работе синхронной машины
с мощной сетью во всех возможных режимах
ток обмотки статора определяется только
значениями
![]() и сопротивления xc
(или
и сопротивления xc
(или
![]() )
и всегда отстает от
)
и всегда отстает от
![]() по фазе на угол
по фазе на угол
![]() .
Величина и фаза
.
Величина и фаза
![]() ,
в свою очередь, зависят от тока возбуждения
генератора и от мощности приводного
двигателя в режиме генератора или от
момента сопротивления исполнительного
механизма в режиме двигателя.
,
в свою очередь, зависят от тока возбуждения
генератора и от мощности приводного
двигателя в режиме генератора или от
момента сопротивления исполнительного
механизма в режиме двигателя.
Обратимся
снова к рисунку 8.7(б) соответствующему
генераторному режиму работы СМ на сеть.
Электромагнитная мощность генератора
![]() определяется мощностью приводного
двигателя, а на векторной диаграмме и
угловой характеристике – углом Ө, причем
вектор ЭДС
определяется мощностью приводного
двигателя, а на векторной диаграмме и
угловой характеристике – углом Ө, причем
вектор ЭДС
![]() опережает вектор напряжения
опережает вектор напряжения
![]() на угол Ө. В системе электромагнитной
связи между ротором и статором, ведущим
звеном является ротор, а его ось сдвинута
на угол Ө по отношению к оси магнитного
потока
на угол Ө. В системе электромагнитной
связи между ротором и статором, ведущим
звеном является ротор, а его ось сдвинута
на угол Ө по отношению к оси магнитного
потока
![]() .
.
Если
вращающий момент приводного двигателя
постепенно уменьшать, мощность генератора
![]() также будет уменьшаться, что на векторной
диаграмме отразится уменьшением угла
Ө; при холостом ходе СГ угол равен нулю,
также будет уменьшаться, что на векторной
диаграмме отразится уменьшением угла
Ө; при холостом ходе СГ угол равен нулю,
![]() ,
векторная диаграмма приобретает вид,
показанный на рисунке 8.7(а). Если теперь
в валу ротора приложить тормозной
момент, то угол Ө изменит знак и синхронная
машина автоматически перейдет в
двигательный режим – она будет потреблять
из сети активную мощность, создавая
вращающий электромагнитный момент.
,
векторная диаграмма приобретает вид,
показанный на рисунке 8.7(а). Если теперь
в валу ротора приложить тормозной
момент, то угол Ө изменит знак и синхронная
машина автоматически перейдет в
двигательный режим – она будет потреблять
из сети активную мощность, создавая
вращающий электромагнитный момент.
Ф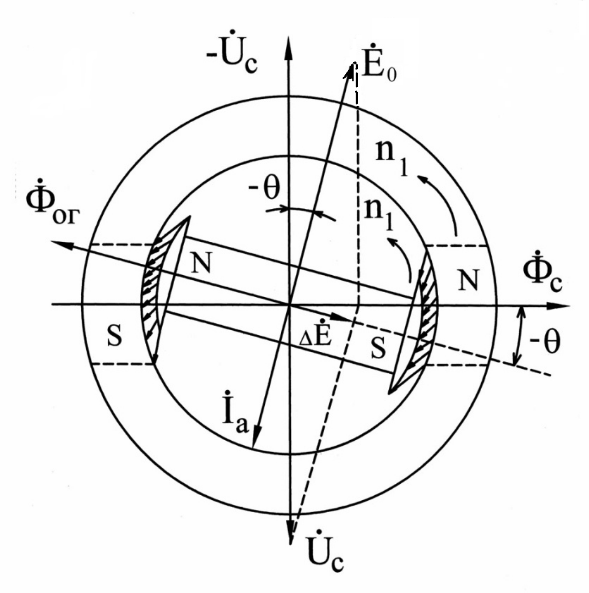 изическая
сущность явлений при переходе СМ в
двигательный режим понятна из векторной
диаграммы рисунка 8.16. На этой диаграмме
вместо вектора
изическая
сущность явлений при переходе СМ в
двигательный режим понятна из векторной
диаграммы рисунка 8.16. На этой диаграмме
вместо вектора
![]() изображен вектор –
изображен вектор –![]() .
Это формальная замена, т.к. не принято
говорить "напряжение двигателя",
мы всегда говорим "напряжение,
подводимое к двигателю", имея в виду,
что это напряжение сети.
.
Это формальная замена, т.к. не принято
говорить "напряжение двигателя",
мы всегда говорим "напряжение,
подводимое к двигателю", имея в виду,
что это напряжение сети.
П
Рисунок
8.16 – К переходу синхронной машины из
генераторного в двигательный режим
при параллельной работе с сетью![]() в сторону отставания. Поле статора
обгоняет ротор и как бы тянет его за
собой посредством натяжения линий
магнитной индукции. Соответственно
поворачивается на угол Ө в сторону
отставания по отношению к вектору
в сторону отставания. Поле статора
обгоняет ротор и как бы тянет его за
собой посредством натяжения линий
магнитной индукции. Соответственно
поворачивается на угол Ө в сторону
отставания по отношению к вектору
![]() вектор ЭДС
вектор ЭДС
![]() .
При этом возникает ЭДС
.
При этом возникает ЭДС
![]() и отстающий от нее на угол
и отстающий от нее на угол
![]() ток
ток
![]() ,
который в данном случае почти совпадает
по фазе с вектором напряжения сети
,
который в данном случае почти совпадает
по фазе с вектором напряжения сети
![]() .
Это значит, что синхронная машина
потребляет из сети активную электрическую
мощность, преобразует ее в механическую,
создает вращающий момент, равный моменту
сопротивления исполнительного механизма,
.
Это значит, что синхронная машина
потребляет из сети активную электрическую
мощность, преобразует ее в механическую,
создает вращающий момент, равный моменту
сопротивления исполнительного механизма,
![]() .
.
При
дальнейшем увеличении момента
сопротивления угол Ө растет, увеличиваются
![]() и
и
![]() ,
возрастают
,
возрастают
![]() и
и
![]() до тех пор, пока снова не установится
равенство
до тех пор, пока снова не установится
равенство
![]() .
.
Значения
электромагнитной мощности
![]() и электромагнитного момента
и электромагнитного момента
![]() синхронного двигателя определяются по
соотношениям 8.12 и 8.13 при неявнополюсном
роторе и 8.23, 8.26 и. 8.27 - при явнополюсном
роторе. Угловые характеристики СД имеют
такой же вид как и у синхронного
генератора, однако в соответствии с
изменением угла Ө они располагаются в
3-ем квадранте. На практике угловые
характеристики синхронных двигателей
часто изображают так же, как и для
синхронных генераторов, что конечно не
меняет сущности происходящих в них
физических процессов.
синхронного двигателя определяются по
соотношениям 8.12 и 8.13 при неявнополюсном
роторе и 8.23, 8.26 и. 8.27 - при явнополюсном
роторе. Угловые характеристики СД имеют
такой же вид как и у синхронного
генератора, однако в соответствии с
изменением угла Ө они располагаются в
3-ем квадранте. На практике угловые
характеристики синхронных двигателей
часто изображают так же, как и для
синхронных генераторов, что конечно не
меняет сущности происходящих в них
физических процессов.
Рассмотрим
явления в СД при изменении момента
нагрузки на валу и при
![]() ,
,![]() и
и
![]() для чего воспользуемся векторной
диаграммой неявнополюсного двигателя
(рисунок.8.17,а).
для чего воспользуемся векторной
диаграммой неявнополюсного двигателя
(рисунок.8.17,а).
Примем,
что в исходном режиме ток возбуждения
Iв
и момент сопротивления Мс1
имеют такие значения, что двигатель
работает при cosφ=1,
чему на векторной диаграмме соответствуют
угол Ө1
и ток нагрузки
![]() .
При увеличении момента нагрузки до
значения Мс2
конец вектора
.
При увеличении момента нагрузки до
значения Мс2
конец вектора
![]() перемещается по окружности радиуса
перемещается по окружности радиуса
![]() ,
угол Ө1
увеличивается до значения Ө2,
а ток нагрузки возрастает до величины
I2
и, располагаясь перпендикулярно вектору
,
угол Ө1
увеличивается до значения Ө2,
а ток нагрузки возрастает до величины
I2
и, располагаясь перпендикулярно вектору
![]() ,
перемещается вокруг точки о по часовой
стрелке.
,
перемещается вокруг точки о по часовой
стрелке.
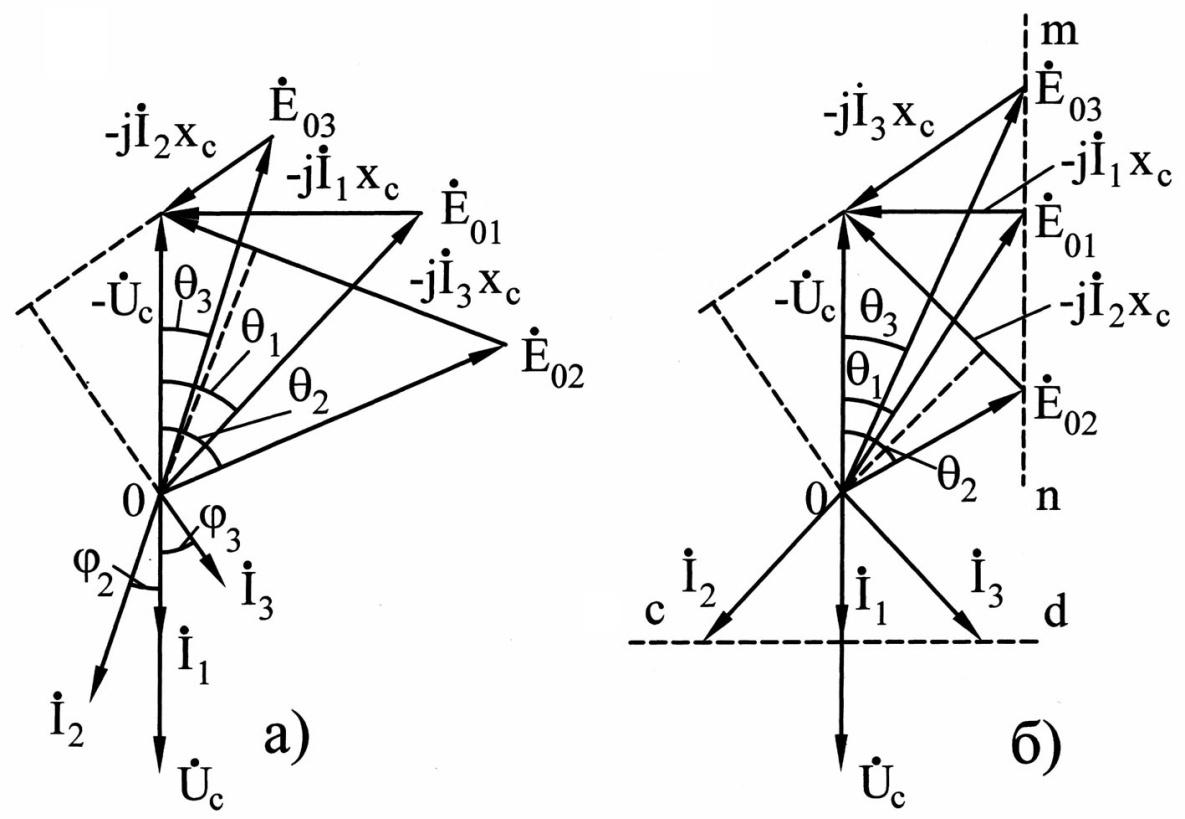
Рисунок 8.17 – Векторные диаграммы синхронного двигателя