

- •Глава 1. Устройство и принцип действия
- •1.1. Принцип действия машин постоянного тока
- •Постоянного тока
- •И ток в витке при щетках,
- •1.2. Устройство машины постоянного тока
- •Машины постоянного тока
- •Сердечника якоря машины постоянного тока
- •Обмотки якоря
- •Щеточное устройство
- •1.3. Обмотки якорей машин постоянного тока
- •1.3.1. Принципы построения обмоток
- •Образование простой петлевой обмотки
- •Секции с полным, укороченным и
- •1.3.2. Простая петлевая обмотка
- •Р исунок 1.16 – Развернутая схема простой петлевой обмотки с диаметральным шагом
- •Параллельных ветвей обмотки якоря
- •1.3.3. Сложная петлевая обмотка
- •Образование сложной петлевой обмотки
- •1.3.4. Простая волновая обмотка
- •Р исунок 1.21 – Развернутая схема простой волновой обмотки
- •1.3.5. Сложная волновая обмотка
- •1.4. Электродвижущая сила якоря и электромагнитный момент
- •Магнитной индукции по ширине полюсного деления
- •1.5. Принципы расчета магнитной цепи машины
- •Намагничивания машины постоянного тока
- •1.6. Реакция якоря
- •Постоянного тока при холостом ходе
- •Результирующее магнитное поле машины постоянного тока тока при нагрузке
- •Магнитное поле обмотки якоря
- •Поля реакции якоря при сдвиге щеток с нейтрали
- •1.7. Коммутация в машинах постоянного тока
- •1.7.1. Физические процессы коммутации
- •1.7.2. Причины и степени искрения
- •1.7.3. Средства улучшения коммутации
- •Добавочных полюсов и компенсационной обмотки
- •1.8. Потери мощности и кпд машин постоянного тока
- •1.9. Щетки электрических машин
- •Обозначения выводов и схемы соединений
- •Параллельное возбуждение – двигатель (а), – генератор (б); смешанное возбуждение – двигатель (в), – генератор (г);
- •1.11. Установка щеточной траверсы относительно
- •Параллельного возбуждения (а) и на нейтраль двухякорной машины (б)
- •1.12. Вопросы для самопроверки и контроля знаний
- •Глава 2. Генераторы постоянного тока
- •2.1. Основные соотношения и классификация
- •Последовательного (в), смешанного (г) возбуждения
- •2.2. Уравнения электрического и механического равновесия
- •2.3. Характеристики генераторов независимого
- •Характеристики генератора независимого возбуждения
- •Снятия внешней характеристики
- •Характеристика генератора
- •Короткого замыкания
- •2.4. Генераторы параллельного возбуждения
- •2.4.1. Условия самовозбуждения генератора
- •Самовозбуждения генератора параллельного возбуждения
- •2.4.2. Характеристики генератора параллельного
- •2.5. Генераторы последовательного возбуждения
- •Характеристика генератора последовательного возбуждения
- •2.6. Генераторы смешанного возбуждения
- •Характеристики генератора смешанного возбуждения
- •Характеристики генератора смешанного возбуждения
- •Регулировочные характеристики генератора смешанного возбуждения
- •2.7. Параллельная работа генераторов
- •Характеристики генераторов
- •Смешанного возбуждения
- •2.8. Электромашинные усилители
- •Характеристики эму
- •Компесации;
- •2.9. Серии судовых генераторов постоянного тока
- •2.10. Вопросы для самопроверки и контроля знаний
- •Глава 3. Электродвигатели постоянного тока
- •3.1. Общие сведения о двигателях постоянного тока
- •Машины постоянного тока
- •Энергетическая диаграмма
- •3.2. Характеристики двигателей параллельного
- •Параллельного возбуждения
- •Характеристики двигателя параллельного возбуждения
- •3.3. Характеристики двигателей последовательного
- •Электродвигателя последовательного возбуждения
- •Характеристики двигателя последовательного возбуждения
- •3.4. Характеристики двигателей смешанного
- •Электродвигателя смешанного возбуждения
- •Характеристики двигателя смешанного возбуждения
- •3.5. Серии судовых электродвигателей постоянного тока
- •3.6. Вопросы для самопроверки и контроля знаний
- •Глава 4. Судовые трансформаторы
- •4.1. Устройство и принцип действия трансформатора
- •4.1.1. Классификация и устройство трансформаторов
- •Простейшего трансформатора
- •Цаемость стали; ℓ и s - длина и поперечное сечение магнитопровода.
- •4.1.3. Напряжения и эдс в трансформаторе при холостом ходе
- •4.2. Режимы работы трансформатора
- •4.2.1. Холостой ход однофазного трансформатора
- •Однофазного трансформатора
- •Диаграмма холостого хода трансформатора
- •4.2.2. Работа трансформатора под нагрузкой
- •Однофазного трансформатора
- •Обмоток трансформатора при нагрузке
- •4.2.3. Режим короткого замыкания
- •4.3. Приведенный трансформатор
- •4.3.1. Приведение вторичной обмотки трансформатора
- •4.3.2. Схема замещения и уравнения электрического
- •Приведенного трансформатора
- •Трансформатора
- •Диаграмма приведенного трансформатора
- •4.3.3. Опытное определение
- •4.3.4. Упрощенная векторная диаграмма приведенного
- •4.4. Рабочие характеристики трансформатора
- •4.4.1. Зависимость вторичного напряжения
- •Трансформатора при различных по характеру нагрузках
- •4.4.2. Внешняя характеристика трансформатора
- •Внешняя характеристика трансформатора
- •4.4.3. Потери в трансформаторе и его кпд
- •Полезного действия трансформатора
- •4.5. Понятие о трехфазных и специальных трансформаторах
- •4.5.1. Трехфазные трансформаторы
- •Трансформаторы
- •4.5.2. Автотрансформатор
- •Понижающего автотрансформатора
- •4.5.3. Сварочные трансформаторы
- •Трансформатор (а) и его внешние характеристики (б)
- •4.5.4. Измерительные трансформаторы
- •4.6. Обозначения выводов и группы соединения
- •4.7. Параллельная работа трансформаторов
- •4.8. Вопросы для самопроверки и контроля знаний
- •5.1.2. Конструктивная схема синхронной машины
- •Синхронной машины:
- •5.1.3. Устройство асинхронного двигателя
- •Р исунок 5.3 - Устройство ад с короткозамкнутым ротором
- •5.2. Трехфазные обмотки электрических машин
- •5.2.1. Принцип построения обмотки
- •А) катушечная секция; б) стержневая; в) катушечная группа
- •Синхронного генератора
- •5.2.2. Параметры обмоток
- •5.2.3. Двухслойные обмотки
- •5.3. Электродвижущая сила в обмотках машин
- •Переменного тока: а,б) – двухполюсная обмотка с диаметральным шагом; в) – двухполюсная обмотка с диаметральным шагом;
- •Укороченным шагом
- •Для определения высших гармоник эдс фазы используют соотношение
- •Результирующая эдс фазы с учетом высших гармония определяется из соотношения
- •5.4. Вращающееся магнитное поле трехфазной обмотки
- •Трехфазной обмотки машин переменного тока
- •Зазоре, содаваемое: а – катушкой с полным шагом; б – катушкой с укороченным шагом; в – катушечной группой
- •Создаваемое: а – катушкой с полным шагом; б – катушкой с укороченным шагом;
- •5.5. Обозначения выводов машин переменного тока
- •5.6. Вопросы для самопроверки и контроля знаний
- •Глава 6. Асинхронные электродвигатели
- •6.I. Принцип действия асинхронного двигателя
- •Асинхронного двигателя
- •6.2. Режимы работы асинхронного двигателя
- •6.2.1. Режим холостого хода при заторможенном роторе
- •Асинхронного двигателя при холостом ходе (а) и коротком замыкании (б)
- •Двигателя и вторичной цепи (б) при неподвижном роторе
- •6.2.2. Режим короткого замыкания ад
- •6.2.3. Рабочий режим асинхронного двигателя
- •6.3. Приведение вращающегося ротора к эквивалентному
- •Двигателя: а – т-образная; б – г-образная
- •Диаграмма приведенного асинхронного двигателя
- •6.4. Энергетическая диаграмма и механическая
- •6.4.I Энергетическая диаграмма. Коэффициент полезного
- •Диаграмма асинхронного двигателя
- •6.4.2. Вращающий момент ад
- •6.4.3 Механическая характеристика ад
- •6.4.4. Зависимость вращающего момента Мэм
- •6.5. Рабочие характеристики асинхронного двигателя
- •Характеристики асинхронного двигателя
- •Характеристика асинхронного двигателя
- •6.6. Проблемные режимы работы судовых асинхронных
- •6.6.1. Проблемы пуска ад
- •При пуске ад
- •Процесса пуска ад
- •6.6.2. Способы пуска судовых ад
- •Ротором: а – схема пуска;
- •6.6.3. Применение ад с улучшенными пусковыми
- •С двухслойным ротором: 1 – рабочий цилиндр; 2 – шихтованный сердечник; 3 – короткозамыкающее кольцо; 4 – вал.
- •Механическиехарактеристики ад с различными роторами:
- •6.6.4. Обрыв фазы обмотки статора
- •6.6.5. Реверс двигателя и работа при «вывернутой» фазе
- •6.7. Регулирование скорости вращения судовых ад
- •6.7.1. Способы регулирования
- •6.7.2. Регулирование изменением подводимого напряжения
- •Двухслойным (массивным) ротором
- •6.7.3. Регулирование изменением активного сопротивления
- •Характеристики ад при изменении активного сопротивления ротора
- •6.7.4. Регулирование изменением частоты питающей сети
- •Характеристики ад при различной частоте
- •6.7.5. Регулирование изменением числа пар полюсов
- •Числе полюсов
- •6.8. Реверсирование и электрическое торможение ад
- •Реверсирования ад
- •Генераторного торможения ад
- •6.9. Однофазные асинхронные двигатели
- •6.9.1 Принцип действия однофазного ад
- •Механическая характеристика (б) однофазного двигателя с пусковой обмоткой
- •6.9.2. Схемы включения ад в однофазную сеть
- •Имеющего три (а,б) или шесть ( в,г) выводов обмотки статора
- •6.10. Экранированные асинхронные двигатели
- •6.11 Серии судовых асинхронных двигателей
- •6.12. Вопросы для самопроверки и контроля знаний
- •Глава 7. Синхронные машины
- •7.1. Принцип действия, устройство
- •7.1.1. Общие сведения о синхронных машинах
- •7.1.2. Принцип действия синхронного генератора
- •7.1.3. Классификация синхронных машин
- •7.1.4. Устройство синхронных машин
- •7.1.5. Особенности устройства бесщеточного
- •Бесщеточного сг
- •7.2. Реакция якоря в синхронном генераторе
- •7.2.1. Общее представление о реакции якоря
- •7.2.2. Реакция якоря в сг при различных по характеру нагрузках
- •7.3. Параметры сг в установившемся режиме работы
- •7.3.1 Составляющие магнитных потоков
- •7.3.2. Индуктивное сопротивление рассеяния
- •7.3.3. Индуктивное сопротивление реакции якоря
- •7.3.4. Активное сопротивление фазы статора
- •7.3.5. Схема замещения неявнополюсного сг
- •7.3.6. Система относительных единиц
- •7.4. Уравнения электрического равновесия
- •7.4.1. Неявнополюсный сг
- •Генератора
- •При работе: а) на активно – индуктивную нагрузку; б) на активно – емкостную нагрузку
- •7.4.2. Явнополюсный сг
- •7.4.4. Изменение напряжения сг при изменении нагрузки
- •7.4.5. Определение изменения напряжения сг
- •Изменения напряжения неявнополюсного сг при изменении нагрузки
- •При изменении нагрузки
- •7.5. Характеристики синхронных генераторов
- •7.5.1. Общие определения характеристик
- •7.5.2. Основные характеристики сг
- •Холостого хода (1) и нагрузочная характеристика (2) синхронного генератора
- •1 Однофазное;
- •7.6. Определение параметров сг
- •Насыщенного значения синхронного индуктивного сопротивления
- •7.7. Потери и к.П.Д. Синхронных машин
- •7.8. Схемы возбуждения синхронных генераторов
- •7.8.1. Принцип построения систем возбуждения сг
- •7.8.2. Процесс самовозбуждения сг
- •В процессе самовозбуждения сг
- •7.8.3. Особенности возбуждения бесщеточных сг
- •Бесщеточного синхронного генератора
- •7.9. Вопросы для самопроверки и контроля знаний
- •Глава 8. Параллельная работа
- •8.1. Преимущества и недостатки параллельной
- •8.2. Включение судовых синхронных генераторов
- •8.2.1. Особенности работы сг на сеть большой мощности
- •8.2.2. Условия включения сг на параллельную работу
- •Диграммы одно- и трехфазного сг для включения на параллельную работу
- •8.2.3. Физические процессы в сг
- •К сети перевозбужденного (а) и недовозбужденного (б) синхронного генератора
- •И напряжения
- •8.2.4. Способы синхронизации
- •И соответствующие векторные диаграммы
- •8.3. Регулирование активной мощности при работе
- •Включенный на параллельную работу с сетью
- •Диаграммы сг при увеличении активной нагрузки
- •8.4. Угловая характеристика неявнополюсного
- •Неявнополюсного синхронного генератора
- •8.5. Статическая и динамическая устойчивость
- •Р исунок 8.11 – к пояснению динамической устойчивости параллельной работы сг с сетью при отклонении активной мощности (а) и тока возбуждения (б)
- •8.6. Угловая характеристика явнополюсного
- •Реактивного момента явнополюсного синхронного генератора
- •8.7. Регулирование реактивной мощности сг
- •Постоянной активной нагрузке
- •Характеристики и зависимости
- •Работе сг с сетью
- •8.8. Перевод синхронной машины в двигательный
- •При изменении момента сопротивления на валу (а) и тока возбуждения (б)
- •8.9. Особенности параллельной работы генераторов
- •При параллельной работе сг соизмеримой мощности
- •8.10. Вопросы для самопрверки и контроля знаний
- •Глава 9. Переходные процессы
- •9.1. Общее описание переходных процессов
- •9.1.1. Сущность переходных процессов
- •9.1.2. Общее описание переходных процессов
- •9.1.3. Короткое замыкание в цепи (r – l)
- •9.2. Переходные процессы в судовых трансформаторах
- •9.2.1. Переходные процессы
- •При включении в режиме холостого хода
- •Намагничивания трансформатора при резком возрастании магнитного потока
- •9.2.2. Изменение тока включения трансформатора
- •9.2.3. Внезапное короткое замыкание трансформатора
- •При коротком замыкании
- •Трансформатора
- •9.2.4. Действие токов короткого замыкания
- •Замыкании
- •9.2.5. Витковое короткое замыкание в обмотках трансформатора
- •9.3. Переходные процессы в асинхронных двигателях
- •9.3.1.Общие представления о переходных процессах
- •9.3.2. Пуск асинхронного двигателя в ход
- •9.4. Переходные процессы в синхронном генераторе
- •9.4.1. О постоянстве потокосцеплений
- •В сверхпроводящем контуре
- •Начальных условиях
- •9.4.2. Симметричное внезапное короткое замыкание сг
- •9.4.3. Апериодическое внезапное короткое замыкание сг
- •9.4.4. Переходные и сверхпереходные индуктивные
- •Коротком замыкании
- •9.4.5. Величина токов внезапного короткого замыкания сг
- •9.5. Вопросы для самопроверки и контроля знаний
- •Глава 1. Устройство и принцип действия машин постоянного тока. Физика основных взаимодействий………………………………………6
- •Глава 2. Генераторы постоянного тока……………………………………53
- •Глава 3. Электродвигатели постоянного тока……………...…………78
- •Глава 4. Судовые трансформаторы……………………………………91
- •Глава 5. Общие вопросы теории машин переменного тока……..…120
- •5.1. Основные элементы конструкции электрических машин
- •5.3. Электродвижущая сила в обмотках машин переменного
- •Глава 6. Асинхронные электродвигатели……………………………146
- •6.1. Принцип действия асинхронного двигателя…………146
- •6.2. Режимы работы асинхронного двигателя……………149
- •Глава 7. Синхронные машины…………………………………….…194
- •Глава 8. Параллельная работа судовых синхронных генераторов...241
- •Глава 9. Переходные процессы в судовых электрических машинах переменного тока………………………………………………275
3.2. Характеристики двигателей параллельного
возбуждения
Электродвигателем параллельного возбуждения называется двигатель постоянного сока, обмотка возбуждения которого включена параллельно обмотке якоря (рисунок 3.3). При снятии характеристик к цепи якоря подводится номинальное напряжение Uн=const.
Ток, потребляемый двигателем из сети, определяется суммой I=Ia+Iв, ток возбуждения обычно равен Iв=(0,03...0,04)Iн. Все характеристики двигателя снимаются при постоянных сопротивлениях в цепях возбуждения rв=const и якоря Σr = const.
Скоростная характеристика. Зависимость n=f(Ia) при Uн=const и Iв=const
Из уравнения ЭДС для электродвигателя (3.2) имеем
![]() (3.8)
(3.8)
Как видно из выражения (3.8) частота вращения двигателя зависит от двух факторов - изменения тока нагрузки и потока. При увеличении тока нагрузки падение напряжения в сопротивлении цепи якоря увеличивается, а частота вращения двигателя уменьшается.
Поперечная реакция якоря размагничивает двигатель, т.е. с ростом тока Ia уменьшается поток и, следовательно, увеличиваются обороты двигателя. Таким образом, оба фактора действуют в отношении оборотов машины встречно и вид скоростной характеристики будет определяется их результирующим действием.
На
рисунке 3.4 показаны три разные
скоростные характеристики д вигателя
(кривые 1,2,3). Кривая 1 - скоростная
характеристика при преобладании влияния
Ia∑r,
кривая
2 - оба фактора приблизительно
уравновешиваются, кривая 3 - преобладает
фактор
размагничивающего действия реакции
якоря.
вигателя
(кривые 1,2,3). Кривая 1 - скоростная
характеристика при преобладании влияния
Ia∑r,
кривая
2 - оба фактора приблизительно
уравновешиваются, кривая 3 - преобладает
фактор
размагничивающего действия реакции
якоря.
В
Рисунок
3.3 Схема двигателя
параллельного
возбуждения
Н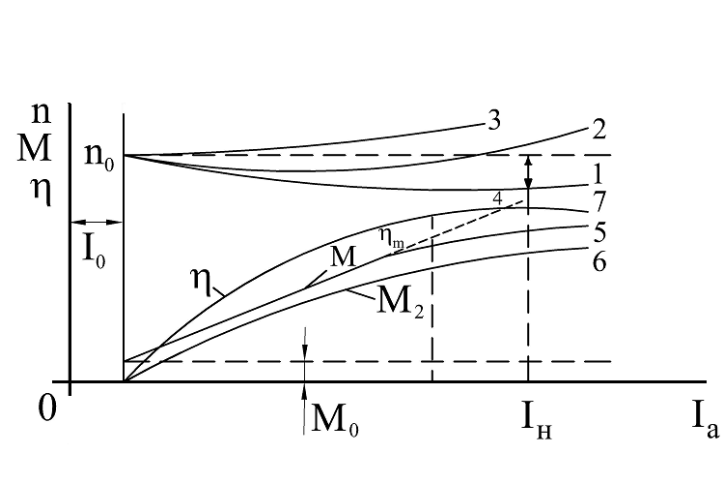 ормальной
формой скоростной характеристики, при
которой обеспечивается устойчивая
работа
двигателя, является характеристика
вида
кривой 1.
ормальной
формой скоростной характеристики, при
которой обеспечивается устойчивая
работа
двигателя, является характеристика
вида
кривой 1.
Н
Рисунок
3.4 – Характеристики двигателяПараллельного возбуждения
аклон характеристики определяется
величиной сопротивления цепи якоря Σr
без
учета реакции якоря. Когда добавочных
сопротивлений в цепь якоря не включено,
характеристика называется естественной.
Естественная характеристика двигателя
параллельного возбуждения достаточно
жесткая. Обычно
![]() ,
где
no
-
частота вращения при холостом ходе.
При
включении в цепь якоря добавочных
сопротивлений Rрг,
наклон характеристик увеличивается,
они становятся "мягкими" и называются
искусственными или реостатными.
,
где
no
-
частота вращения при холостом ходе.
При
включении в цепь якоря добавочных
сопротивлений Rрг,
наклон характеристик увеличивается,
они становятся "мягкими" и называются
искусственными или реостатными.
Моментная характеристика – это зависимость М=f(Ia) при rв=const, U=Uн и Σr=const. В установившемся режиме работы двигателя согласно (3.5) имеем Mэм = M2+M0 = смIaФ. Если бы в процессе работы машины поток Ф не изменялся, то моментная характеристика представляла бы собой прямую (характеристика 4, рисунок 3.4). В действительности поток Ф с ростом тока Ia несколько уменьшается из-за размагничивающего действия реакции якоря, поэтому моментная характеристика слегка наклонена вниз (кривая 5). Характеристика полезного момента располагается ниже кривой электромагнитного момента на величину момента холостого хода (кривая 6).