

ТЕМА 8. ОСОБЫЕ МЕХАНИЗМЫ КИНЕМАТИЧЕСКИХ ЦЕПЕЙ.
К особым механизмам кинематических цепей можно отнести:
-суммирующие (дифференциальные) механизмы;
-реверсирующие механизмы;
-механизмы обгона;
-механизмы периодического действия;
-механизмы управления кинематическими цепями.
1. Суммирующие механизмы.
Суммирующие механизмы встраиваются в специальные суммирующие
(дифференциальные) цепи для суммирования движений с целью расширения диапазона настройки на заданный параметр обработки или для ускоренных пе- ремещений путем сложения (вычитания) движений двух кинематических це- пей. В качестве суммирующих механизмов используются в основном червяч- ные передачи особой конструкции, планетарные редукторы и конические диф- ференциалы.
Червячные дифференциальные передачи (рис. 8.1). В этих передачах чер- вяк имеет некоторое осевое перемещение в результате одновременного враща- тельного и поступательного движения червяка червячное колесо имеет суммар- ное вращательное движение, которое можно определить по формуле
ån = n × |
z1 |
± |
l |
|
z2 |
π × m × z2 |
|||
|
|
|||
где |
|
|
||
m – модуль зацепления. |
|
|||
z – число зубьев колеса |
|
|
||
|
Остальные обозначения приведены на рисун- |
|
ке. Данный суммирующий механизм применяется |
Рис. 8.1 Червячная |
в основном для коррекции кинематических по- |
дифференциальная передача |
грешностей обкатных цепей или цепей деления в |
|
зубообрабатывающих станках. Приводом осевого |
перемещения червяка служит копир.
Планетарные редукторы (рис. 8.2). Данные механизмы служат для уско- ренного перемещения исполнительных органов станков и для расширения диа- пазона регулирования резьбонарезных или обкатных цепей. Ниже приведена схема планетарного редуктора. Частота вращения выходного вала определяется
по формуле
n3 = n1 ± n2 = z × n1 ± (1 - z)× n2
где: z = z1 × z3 z2 z4
Рис. 8.2 Планетарный редуктор
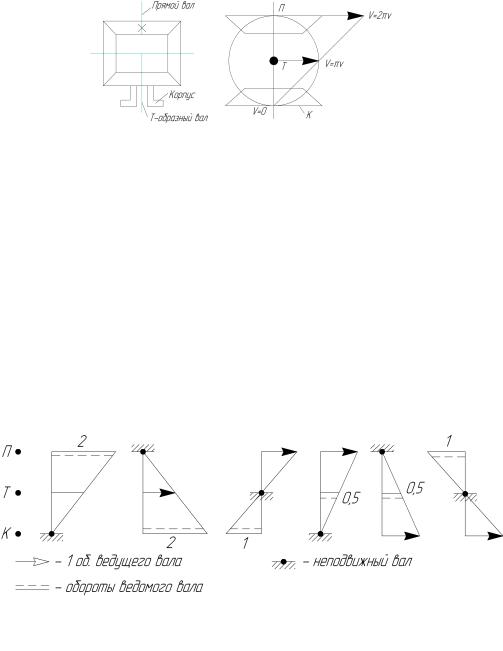
Конический дифференциал (рис. 8.3). Данный механизм применяется в ос-
новном для суммирования движений в обкатных цепях зубообрабатывающих станков и некоторых других. Кинематическая схема дифференциала представ- лена на рисунке. Основными конструктивными элементами являются:
-Т – образный вал, на котором располагается свободно одно или два ко- леса;
-корпус к которому жестко крепится с одной стороны коническое коле- со, а с другой какой либо приводной элемент (шкив, шестерня, червяч- ное колесо и т.д.);
-прямой вал на котором жестко крепится коническое колесо.
Рис. 8.3 Конический дифференциал и его скоростная диаграмма
Число зубъев всех конических колес как правило одинаковое. Передаточ-
ное отношение данного механизма может быть различным в зависимости от схемы сообщения ему движений, то есть каким элементам: корпусу, Т – образ- ному валу или прямому валу будут сообщатся или не сообщаться движения, а с какого элемента движение будет сниматься. Рассмотрим векторную диаграмму этого механизма когда ведущим будет Т – образный вал, ведомым – прямой вал, а корпус будет неподвижен. Из диаграммы видно, что окружная скорость колеса на прямом валу будет в два раза выше, чем на Т – образном, а значит передаточное отношение будет равно двум. Для определения передаточных от- ношений для всех других случаев построим аналогичные векторные диаграм- мы, а результаты построений сведем в таблицы для случаев когда данный ме- ханизм работает как обычный, и как суммирующий.
Рис. 8.4 - Скоростные диаграммы конического дифференциала
при различных способах передачи движения в нём
В случае когда механизм работает как простой его передаточное отноше- ние может меняться от 0,5 до 2, а когда он работает как суммирующий его пе- редаточные отношения меняются от 0 до 3 в зависимости от того совпадают или не совпадают направления вращений ведущих валов.
Вед |
неп |
Ведо |
i |
Т |
К |
П |
2 |
Т |
П |
К |
2 |
П |
Т |
К |
1 |
П |
К |
Т |
0,5 |
К |
Т |
П |
1 |
К |
П |
Т |
0,5 |
Вед |
Ведо |
i |
|
|
|
Т и К |
П |
2 ± 1 = 3(1) |
|
|
|
Т и П |
К |
2 ± 1 = 3(1) |
|
|
|
П и К |
Т |
0,5 ± 0,5 =1(0) |
|
|
|
2. Реверсирующие механизмы. Реверсирующие механизмы служат для изменения направления движения. Существуют следующие основные типы ре- версирующих механизмов.
Механизм цилиндрических трензелей (рис. 8.5). Этот механизм состоит из входного вала, выходного вала на которых устанавливаются зубчатые колеса, промежуточной оси, на которой устанавливается паразитная шестерня. Ниже приведены кинематические схемы основных типов цилиндрических трензелей.
iп = |
z |
|
× |
z |
0 |
|
= |
z |
iп = |
|
z1 |
iп = |
z1 |
× |
z0 |
= |
z1 |
||||||
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
z2 |
z0 |
z2 |
z2 |
|||||||||||||||
z0 |
|
z3 |
z3 |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
i0 |
= |
z2 |
|
|
i0 |
= |
z3 |
|
|
i0 |
= |
z1 |
|
|
||||||||
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
z2 |
|
||||||||||||||||
|
z3 |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
z4 |
|
|
|
|
|
||||||||
Рис. 8.5 Механизм цилиндрических трензелей
Шестерня ZO служит для сохранения направления вращения выходного ва- ла.Недостатком первого типа является непостоянство передаточных отношений iО, iП прямого и обратного движения.
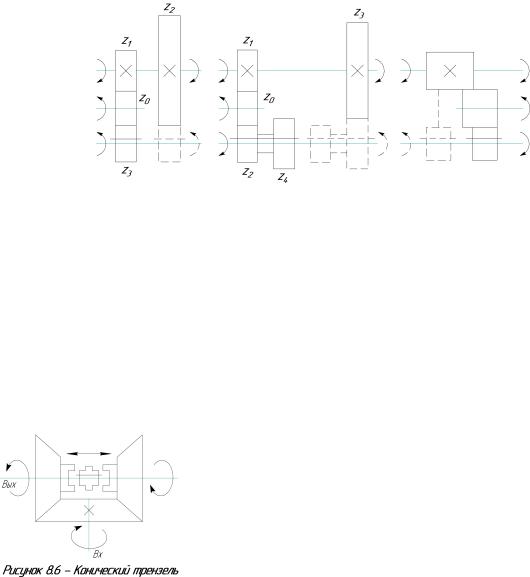
Конический трензель (рис. 8.6). Конический трензель состоит из двух ва- лов и трех конических зубчатых колес. Одно колесо ус- тановлено на ведущем валу и жестко закреплено. Два других колеса, входящие в зацепление с первым, уста- новлены на выходном валу и вращаются на нем сво- бодно в противоположных направлениях. Между этими колесами находится муфта, соединенная с выходным валом посредством скользящей шпонки. Эта муфта может входить в зацепление с полумуфтами колес.
Вводя муфту в зацепление с полумуфтами правого или левого колеса, можно получать на выходном валу правое или левое вращение.
Составное колесо (рис. 8.7). Данный механизм используется в станках дос- таточно редко (из-за сложности конструкции) в тех случаях, когда во время ре- верса останавливать движение не желательно. Ниже представлены кинематиче-
ские схемы данного механизма для осуществления реверса вращательного и поступательного движений.
Рис. 8.7 Составные реверсивные колёса
3.Механизмы обгона (рис. 8.8). Эти механизмы служат для передачи раз- личным участкам кинематической цепи различные частоты вращения от инди- видуальных приводов. Например, если какому либо участку кинематической цепи в некоторый момент времени необходимо сообщить ускоренное движе- ние, то это можно осуществить при помощи обгонной муфты, установленной в начале этого участка. Причем движение на обгонную муфту передается от ин- дивидуального привода. Ниже приведены конструкции двух обгонных муфт: храповой и роликовой.
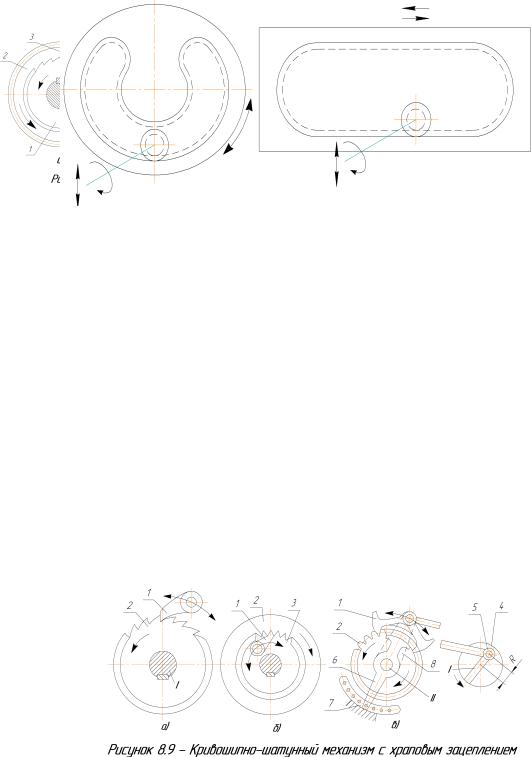
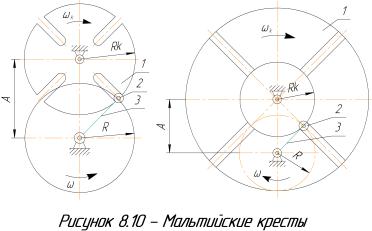
4.Механизмы периодического действия (рис. 8.9, 8.10). Данные механиз-
мы предназначены в кинематических цепях для преобразования непрерывного движения в периодически повторяющиеся движения. Например непрерывное вращательное движение в прерывистое вращательное движение, непрерывное вращательное движение в возвратно-поступательное, возвратно- поступательное в прерывистое вращательное и т.д. К таким механизмам отно- сятся мальтийский, кривошипно-шатунный в сочетании с обгонным. Ниже приведены кинематические схемы этих механизмов.
5. Механизмы управления кинематическими цепями. Данные меха-
низмы служат для включения и выключения кинематических цепей или их уча- стков. Для этого служат муфты:
-кулачковые торцовые и периферийные;
-шариковые;
-фрикционные механические и электромагнитные
Данные муфты используются так же для автоматического отключения при превышении нагрузки в кинематической цепи.
- однооборотные (рис. 8.11).
Они служат для автоматического отключения кинематической цепи или ее части при совершеннии одного оборота муфты.
Рассмотрим принцип работы этой муфты на примере работы токарного ав- томата.
Управление этой муфтой осуществляется от барабанов, установленных на распределительном валу автомата. На барабанах закреплены специальные су- харики, включающие исполнительные механизмы, которые после выполнения заданного цикла движения автоматически отключаются с помощью самовы- ключающихся однооборотных муфт. Ведущая часть 9 кулачковой муфты (рис., а) вращается вместе с валом VII. На нем же свободно сидит подвижная полу- муфта 3, которая справа имеет два удлиненных торцовых кулачках 4, входящих в вырезы ступицы зубчатого колеса 10. Пружина 11 стремится переместить по- лумуфту 3. влево, но палец 2, установленный на рычаге 8, находится в пазу муфты, не давая ей включаться. Команда на включение муфты подается от рас- пределительного вала IX (рис. б) кулачком 6 барабана 7. При вращении бараба- на кулачок поднимает правый конец рычага 8, и палец освобождает подвижную полумуфту 3. Под действием пружины 11 (рис., а) она смещается влево и вхо- дит в зацепление с. ведущей полумуфтой 9. Одновременно призматический фиксатор 1, сидящий на рычаге 5, выжимается из паза. В новом положении (рис.,в) детали 9 и 3 начинают вращаться вместе с валом VII, а палец 2 и фикса- тор 1 скользят по цилиндрическим поверхностям полумуфты 3. Когда фигур- ный паз 12 с рабочим скосом АВ подойдет к пальцу 2, последний под действи- ем пружины западает в него, и при дальнейшем движений полумуфты палец,
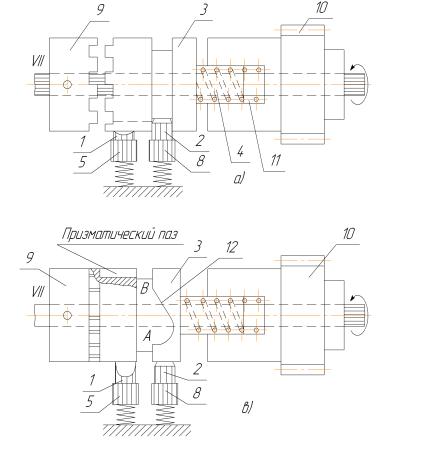
перемещаясь по скосу АВ, выжимает эту полумуфту вправо и выводит ее из за- цепления с полумуфтой 9. Одновременно фиксатор 1 западает в призматиче- ский паз полумуфты 3 и фиксирует ее.
Рис. 8.11 Однооборотная муфта