Границы области движения по радиусу соответствуют r = 0 в (69.14), т.е. r находится из уравнения
|
E =U(r) + |
L2 |
. |
(69.19) |
|
2mr2 |
|
|
|
|
Если имеется две границы rmin и rmax , то движение называется финитным (ограниченным). Угол поворота при движении от rmin до rmax и обратно
rmax |
|
L |
dr |
|
|
|
|
|
mr2 |
|
|
|
|
Dj = 2m ò |
|
|
|
|
. |
(69.20) |
|
|
|
2 |
rmin |
E -U(r) - |
L |
|
|
2mr2 |
|
|
|
|
|
|
Траектория замкнута, если Dj = 2p nk , где k,n - целые числа (траек-
тория замыкается после n колебаний по радиусу и k полных оборотов по j). В общем случае траектория незамкнута. Оказывается, она замк-
нута только для |
потенциалов |
|
U µ - |
1 |
(кулоновское |
поле) и |
|
|
|
|
|
|
|
|
|
r |
|
|
U µ r2 (пространственный осциллятор). |
|
|
|
Падение на центр возможно, если r2(r = 0) > 0 , т.е. |
|
E -U(r) - |
L2 |
|
> 0 |
|
при r 0 , |
(69.21) |
2mr2 |
|
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
L2 |
|
2 |
= 0 (при r = 0). |
(69.22) |
r U(r) + |
|
< Er |
|
2m |
|
Поскольку E – конечная величина, но последний член в выражении равен нулю. Отсюда следуют условия падения на центр
1) |
L = 0 ; |
|
|
(следует из (69.21)) |
|
(69.23) |
2) |
U = - |
a |
|
|
и a > |
L2 |
; ( a = |
L2 |
- круговая орбита) |
(69.24) |
r2 |
|
|
|
2m |
|
|
|
|
|
2m |
|
|
3) |
U = - |
a |
|
, |
n > 2, a > 0. |
|
|
(69.25) |
rn |
|
|
|
|
|
|
|
|
|
|
|
|
|
.
Uэф(r)
В слабом гравитационном поле U µ -r1 , поэтому частицы не па-
дают на центр, однако в сильном гравитационном поле (вблизи черных дыр) в потенциале появляются члены более высокой степени
U µ -ar - rb2 ..., что приводит к падению материи на центр тяготения.
Примеры эффективного потенциала
1) Притягивающий кулоновский (гравитационный) потенциал
U = -ar ,
Uэф(r)
E2
r
E1
rmin rmax
Рис. 49
U |
|
= -a |
+ |
|
L2 |
. |
(69.26) |
эф |
|
2mr2 |
|
r |
|
|
|
|
На |
малых |
расстояниях |
доминирует |
второй член, на больших – первый член. При E > 0 (линия E2 ) частица,
прилетевшая из бесконечности, отразится от потенциального барьера и улетит обратно (инфинитное движение). Для финитного движения необходимо
E < 0 (линия E1 ), при этом движение по радиусу ограничено rmin и rmax .
2) Пространственный осциллятор
Пространственный осциллятор – это тело на пружинке, которое может не только колебаться вдоль пружинки, но и вращаться вокруг закрепленного конца. В этом случае
E |
U = kr2 |
, U |
|
= kr2 |
+ |
L2 |
. (69.27) |
|
эф |
2mr2 |
|
2 |
|
2 |
|
|
Движение финитно при любой физически возможной энергии.
rmin
rmin rmax
Рис. 50

Движение по круговым орбитам
Частица движется по окружности, если |
rmin = rmax . При этом |
¢ |
. Пусть |
|
|
|
|
|
|
Uэф = 0 |
|
|
|
|
|
|
|
U = - |
a |
, |
F = - |
|
na |
. |
(69.28) |
|
|
|
|
|
|
|
rn |
|
|
rn+1 |
|
Частица будет двигаться по окружности при |
|
|
|
mv2 |
= |
na |
. |
(69.29) |
|
|
|
r |
|
|
|
|
|
rn+1 |
|
Это получается как из приравнивания ускорения вызванного силой ус-
корению, необходимому для движения по окружности (r = -v2 |
), а |
|
r |
|
¢ |
, где Uэф дается (69.26). |
|
так же изUэф = 0 |
|
Казалось бы, все просто, при каждом радиусе найдется скорость, необходимая для кругового движения. Но будет ли это движение устойчиво? Движение устойчиво, когда на круговой орбите эффективный потенциал имеет минимум, и неустойчиво (падение на центр) когда в
этой точке Uэф имеет максимум.
Условия устойчивости движения аналогично условиям падения на центр, рассмотренным ранее:
a > 0, |
0 < n < 2 ; |
(69.30) |
a < 0, |
n < 0. |
(69.31) |
При устойчивом движении небольшой радиальный толчок тела приведет к колебаниям вблизи исходной круговой орбиты, например, при n = 1 окружность превращается в эллипс.
Гравитационный потенциал удовлетворяет условию (69.30), а пространственный осциллятор условию (69.31). Однако, если потенциал
U(r) = -ra10 , то тело будет двигаться по окружности, но неустойчиво.
Малейшее начальное радиальное движение будет нарастать, и тело упадет на центр или улетит на бесконечность.

§ 70. Кеплерова задача
Немецкий математик и астроном Кеплер (1571-1630) из анализа данных датского астронома Тихо Браге (1546-1601) установил три эмпирических закона:
1)Каждая планета Солнечной системы обращается по эллипсу, в одном из фокусов которого находится Солнце.
2)Каждая планета движется в плоскости, проходящей через центр Солнца, причём за равные времена радиус-вектор, соединяющий Солнце и планету, описывает равные площади.
3)Квадраты периодов обращения планет вокруг Солнца относятся, как
кубы больших полуосей орбит планет: |
T 2 |
|
a3 |
|
1 |
= |
|
1 |
. |
T 2 |
|
|
|
a3 |
|
2 |
|
2 |
|
Задача о круговом движении в гравитационном поле довольно простая и еще до Ньютона было известно, что, если F µ -r12 , то получа-
ются законы Кеплера. Исаак Ньютон (1642-1727) математически показал, что, действительно, при F µ -r12 планеты движутся по эллипсам
и при этом выполняется третий закон Кеплера. Рассмотрим эту задачу.
Траектория движения
Итак, имеем
|
U = -a |
, |
U |
|
= -a |
+ |
L2 |
, a > 0, |
|
эф |
2mr2 |
|
|
|
r |
|
|
r |
|
|
(70.1) |
|
U |
|
= - |
ma2 |
при r = |
L2 |
|
, |
|
эф, min |
|
|
|
|
|
|
|
2L |
|
* |
|
ma |
|
|
|
|
|
|
|
|
|
|
где последнее соотношение соответствует круговому движению. Из (69.18) получаем
|
|
|
L |
dr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j = ò |
|
|
r2 |
|
|
|
|
|
|
|
|
|
+const = |
|
æ |
|
2ma |
|
|
|
|
|
2 |
ö |
|
|
|
ç |
|
|
|
|
L |
÷ |
|
|
|
|
|
|
ç2mE + |
|
|
|
|
- |
|
|
|
2 |
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
÷ |
|
|
|
|
|
|
ç |
|
|
|
r |
|
|
|
r |
|
÷ |
|
|
|
|
|
|
è |
|
|
|
|
|
|
|
ø |
|
|
|
|
|
|
|
|
|
|
|
æ |
|
|
|
am |
ö |
|
|
|
|
|
|
|
|
|
çL |
- |
÷ |
|
|
|
|
|
|
|
|
d ç |
|
|
|
|
|
|
÷ |
|
|
|
|
|
|
|
|
|
ç |
|
|
|
|
|
L |
÷ |
|
|
|
= -ò |
|
|
|
|
èr |
|
|
|
|
|
ø |
|
|
+const. |
æ |
|
|
|
a2m2 |
÷ö |
|
|
æL |
|
am ö2 |
|
ç |
|
+ |
|
2 |
÷ |
|
|
ç |
|
- |
÷ |
|
|
|
ç2mE |
|
÷ |
-ç |
|
÷ |
|
|
ç |
|
|
|
L |
|
÷ |
|
|
ç |
|
|
÷ |
|
|
è |
|
|
|
|
ø |
|
|
èr |
|
L ø |
|
Учитывая, что ò |
|
dx |
|
= -arccos x |
, получаем |
|
2 |
2 |
|
a |
-x |
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
L |
- |
am |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j = arccos |
r |
L |
|
|
|
|
+const. |
|
|
|
|
|
|
|
2mE + |
a2m |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
Выбором начала отсчета делаем const = 0 . Отсюда траектория движения
|
|
p |
= 1 +e cosj , |
(70.4) |
|
|
r |
|
|
|
|
|
где введены обозначения |
|
|
|
|
|
|
p = |
L2 |
, e = |
1 + |
2EL2 . |
(70.5) |
|
ma |
|
|
|
|
ma2 |
|
Это кривые, соответствующие коническим сечениям (кривые, по которым поверхность круглого конуса пересекается плоскостью, см. курс аналитической геометрии). Величины p и e называются
параметром и эксцентриситетом орбиты.
В аналитической геометрии показывается, что при e = 0 – это круг;
e < 1 – эллипс (E < 0 -финитная траектория); e = 1– парабола (E = 0 );
175
e > 1 – гипербола (E > 0 ).
Рассмотрим случай эллиптической траектории. Как известно, у эллипса имеется два фокуса, и сумма расстояний от фокусов до любой
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
точки постоянна. Уравне- |
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
ние эллипса в декартовых |
b |
|
a |
|
|
|
|
|
|
|
|
|
координатах |
|
|
|
|
|
j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2b |
|
|
x2 |
y2 |
= 1 . |
(70.6) |
O¢ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ b2 |
C c |
O |
|
|
|
|
|
|
|
|
|
|
|
a2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Центр тяготения находит- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ся в одном из фокусов, |
|
2a |
|
|
rmin |
|
|
|
|
|
|
пусть в правом, рис. 51. |
r |
|
|
|
|
|
|
|
|
|
|
|
Из |
|
(70.4) |
|
минимальное |
max |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
расстояние от фокуса (пе- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 51 |
|
|
|
|
|
|
|
|
|
|
|
ригелий) и |
|
максимальное |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
расстояние (афелий) |
|
|
|
|
r |
|
= |
|
|
p |
|
, r |
= |
|
p |
|
; |
|
|
|
(70.7) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
min |
|
1 +e |
|
|
max |
|
1 -e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
параметр p равен радиусу при j |
= p |
. Большая полуось |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
a = |
1 |
(r |
+r |
|
|
) |
= |
|
p |
|
|
= - |
a |
|
= |
a |
|
, |
(70.8) |
2 |
|
|
1 -e2 |
2E |
|
2 | E | |
|
min |
|
max |
|
|
|
|
|
|
|
|
(при финитном движении энергия отрицательна, поэтому здесь использован модуль E , чтобы знак минус не вводил в заблуждение),
отсюда
rmin = a(1 -e), |
rmax |
= a(1 +e). |
(70.9) |
Расстояние между фокусом и центром эллипса |
|
|
|
c = 0.5(rmax -rmin ) = ae; |
|
|
(70.10) |
малая полуось |
|
|
|
|
|
|
|
b = a2 -c2 = a 1 -e2 |
= |
|
p |
= |
L |
. |
(70.11) |
|
|
|
|
|
|
1 -e2 |
2m | E | |
|

Как мы видим, большая полуось a зависит только от полной энергии, а малая полуось зависит также от момента импульса.
Заметим, что выражение для rmax,rmin и a легко получить из законов
сохранения энергии и момента импульса. Действительно, в перигелии и афелии нет радиального движения, тогда
L = mvr, |
|
E = |
mv2 |
|
a |
, |
|
|
(70.12) |
|
2 |
- |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
æ |
|
|
|
|
|
|
2 |
÷ö |
|
|
|
|
|
a ç |
|
|
|
2EL |
÷ |
|
|
r |
= - |
|
|
ç1 |
|
1 |
+ |
|
|
|
2 |
÷ |
, |
(70.13) |
|
|
|
|
|
max,min |
|
|
|
ç |
|
|
|
|
|
|
÷ |
|
|
|
|
|
ç |
|
|
|
ma |
|
÷ |
|
|
|
|
|
2E ç |
|
|
|
|
|
|
|
|
|
|
è |
|
|
|
|
|
|
|
ø |
|
|
a = |
1 |
(r |
|
+r |
|
) = - |
a |
, |
|
|
(70.14) |
2 |
|
|
2E |
|
|
|
min |
|
max |
|
|
|
|
|
|
|
что совпадает с (70.8) и (70.9).
Период обращения
Из сохранения момента импульса
2 |
dS |
|
|
L |
(70.15) |
L = mr j |
= 2m dt |
, |
S = |
|
T, |
2m |
где T – период обращения. Учитывая, что для эллипса S = pab получаем
T = |
2pmab |
= pa |
|
m |
|
= 2pa3/2 |
m . |
(70.16) |
L |
|
2 | E |3 |
|
|
|
|
a |
|
Отсюда следует третий закон Кеплера |
|
|
|
|
|
T 2 = |
4p2m a3 . |
|
|
(70.17) |
|
|
|
|
a |
|
|
|
Этот закон легко получить в случае кругового движения, но оказывается формула остается справедливой и для эллиптического движения, если вместо радиуса в формуле использовать большую полуось эллипса. Для гравитационного взаимодействия тел с массами M и m подставляем
|
a =GMm, |
|
m m = |
|
Mm |
, |
(70.18) |
|
M +m |
|
|
|
|
|
|
|
|
|
|
|
|
и получаем |
T 2 = |
|
|
4p2a3 |
|
. |
|
|
(70.19) |
G(M +m) |
|
|
|
|
|
|
|
|
|
Случай e = 1, |
E = 0 -парабола |
|
|
|
|
|
|
|
|
|
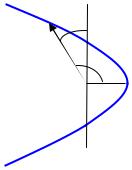
Dj |
Из (70.4) следует, что в этом случае |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
|
r |
= p |
= |
|
L2 |
|
|
(70.20) |
|
|
2ma |
|
|
min |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и угол поворота при облете центра тяготения |
|
Dj = 2p, т.е. траектория |
поворачивает |
в об- |
|
ратную сторону (cos 1 |
при r ). Выра- |
|
жение (70.20) также легко получить из законов |
Рис. 52 |
сохранения энергии и момента импульса, пола- |
гая в них E = 0 , тогда rmin |
находится из |
|
|
|
|
|
|
L = mvr, |
E |
= |
mv2 |
- |
a |
= 0. |
(70.21) |
|
|
2 |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
Случай e > 1, E > 0 , — гипербола
Гипербола – геометрическое место точек, для которых абсолютная величина разности расстояний до двух заданных точек (фокусов) (-c, 0),
(c, 0)постоянна и равна 2a < 2c . Уравнение гиперболы в декартовых координатах
x2 |
- y2 |
= 1. |
(70.22) |
a2 |
|
b2 |
|
|
|
В полярных координатах (70.4) |
|
p/r = 1 +e cosj, |
e > 1 . Минималь- |
ное расстояние равно |
|
|
|
|
|
|
|
r |
|
= |
|
|
p |
. |
(70.23) |
|
|
|
|
min |
|
e +1 |
|
|
|
|
|
Полагая r = ¥, находим cosj = - |
1 . Половина угла поворота траек- |
|
|
|
|
|
e |
|
тории при пролете мимо центра тяготения, см. рис. 52,
|
|
|
|
p |
|
æ |
|
|
ö |
|
p |
|
|
Dj = j |
- |
|
ç |
|
1÷ |
- |
|
(70.24) |
|
= arccosç- |
|
÷ |
|
|
|
|
|
|
2 |
|
ç |
|
e |
÷ |
|
2 |
|
|
|
|
|
|
|
è |
|
ø |
|
|
|
отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
æ |
|
ö |
|
|
|
1 |
|
|
|
|
|
1 |
|
ç |
p÷ |
|
|
|
|
|
|
|
|
(70.25) |
-cosçDj + |
|
÷ |
= sin Dj = |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
ç |
2 |
÷ |
|
|
|
e |
|
|
|
|
|
|
2 |
|
è |
ø |
|
|
|
|
|
|
|
1 + |
2EL |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ma2 |
|
Если частица имела на |
бесконечности |
скорость |
v¥ и прицельный |
параметр (расстояние между продолжением исходной траектории и центром тяготения) r, то подставляя в (70.25)
|
L = mrv , E = |
mv2 |
, |
|
¥ |
|
2 |
|
¥ |
|
|
|
|
нетрудно получить
tg Dj = 2raE = GMrv2 .
¥
|
Проследим эволюцию орбит при измерении |
|
параметров. Пусть тела пролетают на одном |
|
и том же расстоянии от центра тяготения, но |
|
с разными скоростями, рис. 53. При малой |
|
скорости центр тяготения находится в пра- |
|
вом фокусе эллиптической орбиты. При уве- |
|
личении скорости орбита становится круго- |
|
вой. При еще большей скорости орбита ста- |
|
новится снова эллиптической, но центр тяго- |
|
тения находится уже в левом фокусе эллип- |
|
са. При еще большей скорости траектория |
Рис. 53 |
становится гиперболической. |
Случай отталкивающего потенциала
Пусть
|
U = a |
, U |
|
= a |
+ |
L2 |
, |
a>0 . |
(70.28) |
|
эф |
2mr2 |
|
r |
|
r |
|
|
|
|
После вычислений аналогичных (70.2) получается уравнение траектории, отличающееся от (70.4) только знаком минус перед единицей
p |
= -1 +e cosj, |
(70.29) |
r |
|
|
p и e даются прежними формулами (70.5). Расстояние в перигелии
|
|
|
|
r = |
p |
. |
|
|
(70.30) |
|
|
|
|
|
|
|
|
|
|
|
r |
|
min |
e -1 |
|
|
|
|
|
Dj |
|
|
|
|
|
|
|
Половина полного угла поворота при пролете |
|
|
j |
|
|
|
|
|
|
|
|
|
Dj = p |
|
|
|
|
мимо отталкивающего центра |
-j. |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
При r = ¥ из (70.29) имеем |
cosj = 1 |
, то- |
|
Рис. 54 |
гда |
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
æ |
ö |
|
|
|
1 |
|
|
|
|
|
|
çp |
÷ |
= cosj = |
. |
(70.31) |
|
|
|
sin Dj = sinç |
-j÷ |
|
|
|
|
ç |
÷ |
|
|
|
e |
|
|
|
|
|
|
è2 |
ø |
|
|
|
|
|
|
Из сравнения (70.31) и (70.25) следует, что углы отклонения для притягивающего и отталкивающего потенциалов одинаковы! Это весьма неочевидный результат. Половинный угол поворота для частицы, летящей с бесконечности, будет даваться той же формулой (70.27). Разница только в том, что в случае притяжения частица отклоняется в сторону центра притяжения, а в случае отталкивания в обратную сторону.
Конические сечения.
Выше было декларировано, что формула (70.4) описывает эллипсы, параболы, гиперболы. Покажем это. Учитывая, что cos x / r , запи-
шем (70.4) в виде
|
r = p -xe . |
(70.32) |
Возводя в квадрат, получаем |
|
|
x2 y2 |
p2 2 pxe x2e2 . |
(70.33) |
Далее, после перегруппировки членов получается
1) e 1 (эллипс)