

4.1.3. Дифференцирующее звено первого порядка
Дифференцирующее звено 1–го порядка имеет передаточную функцию вида
![]() (4.10)
(4.10)
где k– передаточный коэффициент звена;– постоянная времени.
Уравнение этого звена
![]() (4.11)
(4.11)
получим из (4.2) при
![]() При этом
При этом![]()
![]() Выходная величина этого звена определяется
не только текущим значением, но и
скоростью изменения входной величины.
Выходная величина этого звена определяется
не только текущим значением, но и
скоростью изменения входной величины.
Характеристики звена:
а) Переходная функция определяется выражением
![]() (4.12)
(4.12)
При скачкообразном изменении входной
величины
![]() на выходе звена получим импульс с
бесконечно большой амплитудой,
соответствующий бесконечно большой
скорости изменения входной величины в
момент скачка. После этого выходная
величина принимает постоянное
установившееся значение
на выходе звена получим импульс с
бесконечно большой амплитудой,
соответствующий бесконечно большой
скорости изменения входной величины в
момент скачка. После этого выходная
величина принимает постоянное
установившееся значение![]() .
.
б) Частотные характеристики звена имеют вид:
![]() (4.13)
(4.13)
где
![]() ,
,![]()
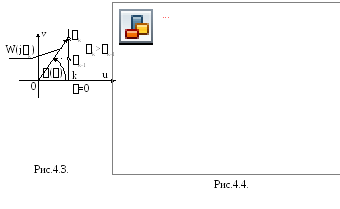
АФХ звена изображена на рис. 4.3. АФХ – прямая, параллельная мнимой оси. Она начинается на действительной оси в точке kпри=0.
Дифференцирующее звено создает опережение
выходной величины по фазе. При
![]() сдвиг по фазе стремится к 90.
сдвиг по фазе стремится к 90.
в) Уравнение ЛАХ:
![]()
![]() (4.14)
(4.14)
Для частот
![]() в выражении (4.14) можно пренебречь
величиной
в выражении (4.14) можно пренебречь
величиной![]() по сравнению с 1, а для частот
по сравнению с 1, а для частот![]() наоборот,
наоборот,
 можно
пренебречь единицей по сравнению с
величиной
можно
пренебречь единицей по сравнению с
величиной![]() .
Тогда приближенно можно записать
.
Тогда приближенно можно записать
 (4.15)
(4.15)
Соотношения (4.15) показывают, что ЛАХ
дифференцирующего звена 1-го порядка
приближенно может быть представлена
двумя прямолинейными отрезками
(асимптотами). В граничной точке
![]()
![]() Действительное значение ЛАХ в точке
Действительное значение ЛАХ в точке![]()
![]() отличается от приближенного значения
примерно на 3 дБ. Частота
отличается от приближенного значения
примерно на 3 дБ. Частота![]() называется частотой сопряжения
асимптотической ЛАХ. Линия
называется частотой сопряжения
асимптотической ЛАХ. Линия![]() параллельна оси частот, а линия
параллельна оси частот, а линия![]() имеет положительный наклон +20 дБ/дек.
На рис. 4.4 изображены ЛАХ и ЛФХ
дифференцирующего звена 1-го порядка,
построенные в зависимости от безразмерной
(нормированной) частоты
имеет положительный наклон +20 дБ/дек.
На рис. 4.4 изображены ЛАХ и ЛФХ
дифференцирующего звена 1-го порядка,
построенные в зависимости от безразмерной
(нормированной) частоты![]() Нетрудно убедиться, что сопрягающей
частотой будет значение
Нетрудно убедиться, что сопрягающей
частотой будет значение![]() а ветвь
а ветвь![]() также будет иметь положительный наклон
+20 дБ/дек. В логарифмическом
масштабе частот характеристика
также будет иметь положительный наклон
+20 дБ/дек. В логарифмическом
масштабе частот характеристика![]() косо-симметрична относительно сопрягающей
частоты
косо-симметрична относительно сопрягающей
частоты![]() ,
при которой она имеет ординату 45.
,
при которой она имеет ординату 45.
4.1.4. Интегрирующее звено
У интегрирующего звена скорость изменения выходной величины пропорциональна входной величине:
![]() (4.16)
(4.16)
Уравнение (4.16) получим из (4.1) при
![]() .
При этом передаточный коэффициент
.
При этом передаточный коэффициент![]()
Умножим (4.16) на dtи проинтегрируем по времени от нуля до текущего значенияt.
 (4.17)
(4.17)
Решение уравнения (4.17):
![]() (4.18)
(4.18)
Согласно (4.18) выходная величина пропорциональна интегралу от входной величины, откуда и название звена.
Применив к уравнению (4.16) преобразование Лапласа при нулевых начальных условиях, получим:
![]()
![]() (4.19)
(4.19)
Из (4.19) следует, что интегрирующее звено
имеет передаточную функцию ![]() (4.20)
(4.20)
С помощью интегрирующего звена можно
моделировать, например, кинематическую
связь между углом и угловой скоростьюповорота некоторого механического
элемента:![]()
Характеристики звена:
а)Переходная функция звена определяется выражением
![]() (4.21)
(4.21)
График функции (4.21) есть прямая, проведённая
из начала координат под углом
![]()
б) Весовая функция интегрирующего звена
![]() (4.22)
(4.22)
есть ступенчатая функция.
в) Частотная передаточная функция
![]() (4.23)
(4.23)
где ![]()
![]()
П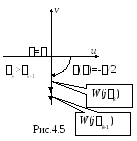 ри
измененииот 0 до
ри
измененииот 0 до![]() (рис.4.5) конец вектора
(рис.4.5) конец вектора![]() движется по отрицательной части мнимой
оси от
движется по отрицательной части мнимой
оси от![]() до 0. Интегрирующее звено создает
отставание выходной величины от входной
на 90при всех
частотах. Амплитуда выходной величины
уменьшается с возрастанием частоты.
до 0. Интегрирующее звено создает
отставание выходной величины от входной
на 90при всех
частотах. Амплитуда выходной величины
уменьшается с возрастанием частоты.
г) ЛАХ интегрирующего звена определяется формулой
![]() (4.24)
(4.24)
Выражение (4.24) есть уравнение прямой с
наклоном -20 дБ/дек, проходящей при
частоте
![]() через точку
через точку![]() Пересечение графиком функции (4.24) оси
частот происходит при=k.
Пересечение графиком функции (4.24) оси
частот происходит при=k.