

7.5. Критерий устойчивости Найквиста
Данный критерий вытекает из принципа аргумента. Характерной его особенностью является то, что вывод об устойчивости или неустойчивости замкнутой системыделается в зависимости от вида АФЧХ или ЛЧХразомкнутой системы.
Передаточную функцию разомкнутой системы можно представить в виде (см. (5.17)):
 гдеm<n.
гдеm<n.
Введем в рассмотрение вспомогательную функцию
![]() (7.25)
(7.25)
где
![]() характеристический полином замкнутой
системы, степень которого совпадает со
степенью характеристического полинома
разомкнутой системы
характеристический полином замкнутой
системы, степень которого совпадает со
степенью характеристического полинома
разомкнутой системы![]() :
:![]()
Для первого и последнего коэффициентов
полинома
![]() справедливы равенства:
справедливы равенства:![]()
Сделаем подстановку
![]() в выражение (7.25):
в выражение (7.25):
![]() (7.26)
(7.26)
Предположим, что разомкнутая система
устойчива. Это значит, что все корни
характеристического уравнения
![]() =0
находятся в левой части КП и изменение
аргумента вектора
=0
находятся в левой части КП и изменение
аргумента вектора![]() при возрастанииот 0 до
при возрастанииот 0 до![]() будет
будет![]()
Изменение аргумента вектора
![]() при возрастанииот 0 до
при возрастанииот 0 до![]() в общем случае равно (см. (7.24))
в общем случае равно (см. (7.24))![]() гдеm-число корней
характеристического уравнения
гдеm-число корней
характеристического уравнения![]() =0,
лежащих в правой части КП.
=0,
лежащих в правой части КП.
Частотную характеристику
![]() (7.26) запишем в показательной форме:
(7.26) запишем в показательной форме:
 (7.27)
(7.27)
где
![]() амплитудная
частотная характеристика функции
амплитудная
частотная характеристика функции![]() ;
;![]() .
.
Изменение аргумента вектора
![]() при возрастании частотыот 0 до
при возрастании частотыот 0 до![]() равно разности изменений аргументов
равно разности изменений аргументов![]() и
и![]() :
:
![]()
Замкнутая система будет устойчивой, если m=0, т.е. если
![]() (7.28)
(7.28)
Для построения АФХ
![]() определим начальное (
определим начальное (![]() )
и конечное (
)
и конечное (![]() )
положения вектора
)
положения вектора![]() на КП. С этой целью вычислим модуль
вектора
на КП. С этой целью вычислим модуль
вектора![]() и аргумент
и аргумент![]() на границах частотного интервала
на границах частотного интервала![]()
Из выражения (7.27) получим граничные
значения
![]() :
:
1)
![]()
![]()
где К- коэффициент усиления разомкнутой системы;
2)
![]() В этом случае
В этом случае![]()
Значения аргументов векторов
![]() и
и![]() при
при![]() равны
равны![]() при любом расположении корней уравнений
при любом расположении корней уравнений![]() =0
и
=0
и![]() на КП. Для конечного значения аргумента
вектора
на КП. Для конечного значения аргумента
вектора![]() получим:
получим:
![]()
Таким образом, направление вектора
![]() при
при![]() совпадает с положительным направлением
вещественной оси комплексной плоскости,
а модуль вектора
совпадает с положительным направлением
вещественной оси комплексной плоскости,
а модуль вектора![]() (рис. 7.3 а).
(рис. 7.3 а).
Начальное значение аргумента вектора
![]() определим из выражения (7.28):
определим из выражения (7.28):
![]() (7.29)
(7.29)
Для системы, устойчивой в замкнутом
состоянии, ![]() .
Следовательно, направление вектора
.
Следовательно, направление вектора![]() при
при![]() также совпадает с положительным
направлением вещественной оси КП, а
модуль вектора
также совпадает с положительным
направлением вещественной оси КП, а
модуль вектора![]() (рис. 7.3 а).
(рис. 7.3 а).
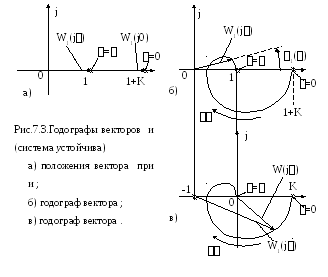
Условие устойчивости замкнутой системы
(7.28) будет выполнено лишь в том случае,
если при возрастании от 0 догодограф
вектора![]() не охватит начало координат (рис. 7.3 б).
не охватит начало координат (рис. 7.3 б).
От годографа вектора
![]() можно
перейти к АФХ разомкнутой системы
можно
перейти к АФХ разомкнутой системы![]() в соответствии с выражением (7.26):
в соответствии с выражением (7.26):
![]() (7.30)
(7.30)
Единицу в формуле (7.30) можно рассматривать
как вектор – орт оси вещественных
чисел. Если сместить кривую
![]() влево на единицу, получим АФХ разомкнутой
системы (рис. 7.3 в).
влево на единицу, получим АФХ разомкнутой
системы (рис. 7.3 в).
Амплитудно–фазовый критерий устойчивости можно сформулировать следующим образом:
Если разомкнутая система устойчива, то для устойчивости замкнутой системы необходимо и достаточно, чтобы амплитудно – фазовая характеристика разомкнутой системы не охватывала точку с координатами (-1; j 0).
Если замкнутая система неустойчива,
то уравнение
![]() содержит корни с положительными
вещественными частями (m0).
Результирующий угол поворота вектора
содержит корни с положительными
вещественными частями (m0).
Результирующий угол поворота вектора![]() при возрастании частоты от 0 до
при возрастании частоты от 0 до![]()
![]() .
Это означает, что для неустойчивой
замкнутой системы годограф вектора
.
Это означает, что для неустойчивой
замкнутой системы годограф вектора![]() охватывает начало координат на уголmпо часовой стрелке.
охватывает начало координат на уголmпо часовой стрелке.
Пример .Дана передаточная функция разомкнутой системы
![]() .
.
Разомкнутая система устойчива, так как
характеристическое уравнение![]() 0,5+1=0
имеет отрицательный вещественный корень
0,5+1=0
имеет отрицательный вещественный корень![]() .
.
Построим вспомогательную функцию
![]() :
:
![]() .
.
Замкнутая система неустойчива, так как
характеристическое уравнение
![]() имеет положительный вещественный
корень
имеет положительный вещественный
корень![]() .
.