

Тема 9. Математическая модель импульсного элемента
9.1. Общие сведения об импульсных системах
Линейной импульсной системой называется
такая система автоматического управления,
которая кроме звеньев, описываемых
линейными дифференциальными уравнениями,
содержит импульсный элемент, преобразующий
непрерывное входное воздействие в
последовательность импульсов, имеющих
одинаковую длительность и период
следования. При этом импульсный элемент
выполняет две операции: квантование по
времени и амплитудно-импульсную модуляцию
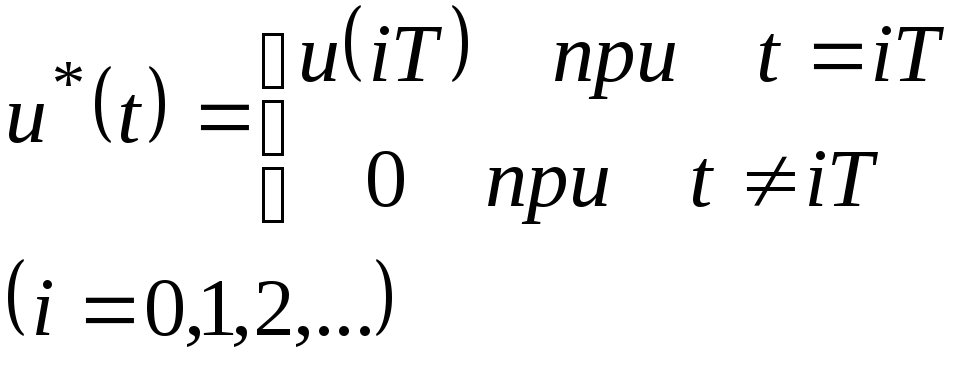
(рис 9.1). Первая из них состоит в том, что
сигнал
![]() на выходе импульсного элемента появляется
в дискретные моменты времениt=ti
(i=0,1,2…),
равноотстоящие друг от друга, т.е.ti=iT,
гдеT– период
дискретности. При амплитудно-импульсной
модуляции модулируемым параметром
служит амплитуда (высота) импульсов.
Обычно она пропорциональна значениям
непрерывного сигналаu(t)
в дискретные моменты времениt=iT(i=0,1,2…). Сигнал
на выходе импульсного элемента появляется
в дискретные моменты времениt=ti
(i=0,1,2…),
равноотстоящие друг от друга, т.е.ti=iT,
гдеT– период
дискретности. При амплитудно-импульсной
модуляции модулируемым параметром
служит амплитуда (высота) импульсов.
Обычно она пропорциональна значениям
непрерывного сигналаu(t)
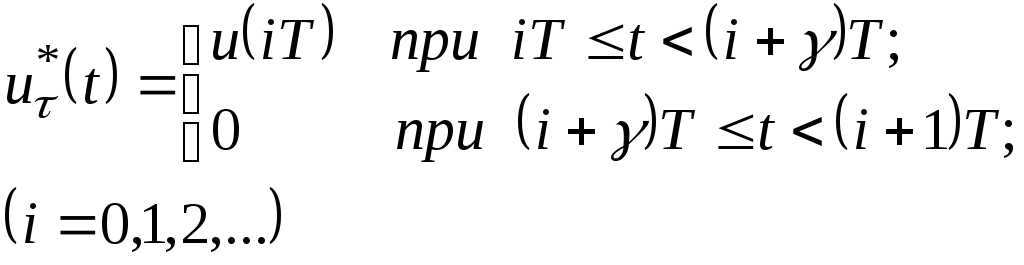
в дискретные моменты времениt=iT(i=0,1,2…). Сигнал![]() на выходе импульсного элемента формируется
в виде
на выходе импульсного элемента формируется
в виде
 (9.1)
(9.1)
(i=0,1,2…), гдеkA
– коэффициент пропорциональности
(на рис. 9.1kA=1);![]() - скважность
импульсов, равная отношению времени
длительности импульсаТк периоду дискретности
- скважность
импульсов, равная отношению времени
длительности импульсаТк периоду дискретности
![]() .
.
И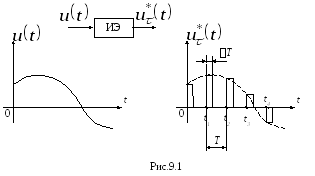 мпульсный
элемент считается линейным, если в нем
выполняется принцип суперпозиции, т.е.
если его реакция на сумму воздействий
равна сумме его реакций на каждое из
этих воздействий порознь. Импульсный
элемент с амплитудно-импульсной
модуляцией и линейной зависимостью
амплитуды импульсов от величины входного
воздействия в момент квантования будет
линейным.
мпульсный
элемент считается линейным, если в нем
выполняется принцип суперпозиции, т.е.
если его реакция на сумму воздействий
равна сумме его реакций на каждое из
этих воздействий порознь. Импульсный
элемент с амплитудно-импульсной
модуляцией и линейной зависимостью
амплитуды импульсов от величины входного
воздействия в момент квантования будет
линейным.
Импульсный элемент может представлять собой самостоятельное функциональное устройство или являться составной частью цифро-аналогового преобразователя, входящего в систему управления с цифровой вычислительной машиной (ЦВМ).
9.2. Вывод уравнений импульсного элемента
Рассмотрим разомкнутую систему, состоящую из импульсного элемента и непрерывной части (рис 9.2). Импульсный элемент на рис. 9.2 условно заменён последовательным соединением ключа и формирующего устройства с передаточной функцией Wф, непрерывная часть представлена звеном с передаточной функциейWo. Ключ периодически с периодомТзамыкается на очень короткий промежуток времени и выделяет из непрерывного сигналаu(t)его мгновенные значенияu(iT):
 (9.2)
(9.2)

Последовательности типа u(iT)(или в сокращённой записиu(i)
), (i=0,1,2,…)
называют решётчатыми функциями, а
ординатыu(iT)
- дискретами решётчатой функции.
Формирующее устройство преобразует
последовательностьu(iT),
(i=0,1,2…) в прямоугольные
импульсы длительностью![]() в соответствии с выражением (9.1).
Коэффициент пропорциональностиkАможно отнести к непрерывной части
системы. Тогда амплитуда (высота)
импульсов будет равнаu(iT):
в соответствии с выражением (9.1).
Коэффициент пропорциональностиkАможно отнести к непрерывной части
системы. Тогда амплитуда (высота)
импульсов будет равнаu(iT):
 (9.3)
(9.3)
Передаточная функция Wф(s)
может быть определена как отношение
изображений по Лапласу выходной величины
формирующего устройства![]() и его входной величины. Однако входная
величина представляет собой
последовательностьu(iT),
для которой преобразование Лапласа не
существует. Чтобы устранить эту
неопределённость, положим, что идеальный
импульсный элемент (ключ) генерирует
не импульсы конечной высотыu(iT),
а бесконечно короткие по длительности
импульсы типа‑функций,
площади которых пропорциональны
значениямu(iT).
В этом случае математическую модель
дискретной последовательностиu*(t)можно представить выражением:
и его входной величины. Однако входная
величина представляет собой
последовательностьu(iT),
для которой преобразование Лапласа не
существует. Чтобы устранить эту
неопределённость, положим, что идеальный
импульсный элемент (ключ) генерирует
не импульсы конечной высотыu(iT),
а бесконечно короткие по длительности
импульсы типа‑функций,
площади которых пропорциональны
значениямu(iT).
В этом случае математическую модель
дискретной последовательностиu*(t)можно представить выражением:
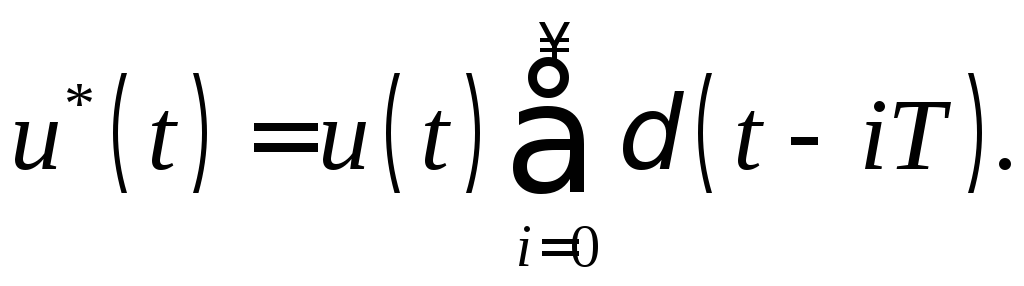 (9.4)
(9.4)
Отдельный импульс последовательности (9.4) в произвольный момент времени kТопределяется выражением:
![]() . (9.5)
. (9.5)
Чтобы найти площадь мгновенного импульса, надо проинтегрировать функцию (9.5) по времени от нуля до бесконечности. Площадь S(kT) импульсаu*в силу фильтрующего свойстваδ– функции равнаu(kT).
При поступлении на вход формирующего
устройства единственной дискреты u(kT),
которая формально заменяетсяδ-
функцией (9.5), на его выходе образуется
прямоугольный импульс высотойu(kT)и длительностью![]() :
:
![]() (9.6)
(9.6)
Для отыскания изображения входного сигнала (9.5) по Лапласу
![]() (9.7)
(9.7)
введём новую переменную интегрирования:
![]() (9.8)
(9.8)
Выполним замену переменной интегрирования в (9.7):

![]()
 (9.9)
(9.9)
Интервал ∆x=[0-;0] есть время действия импульсаδ(x). Значениеx=0-бесконечно близко значениюx=0.
Применим прямое преобразование Лапласа к выходному сигналу (3.6):
![]() (9.10)
(9.10)
Если в первом интеграле (9.10) выполнить
замену переменной интегрирования в
соответствии с выражением (9.8), а во
втором ввести новую переменную
интегрирования x’=t-(k+![]() )T,
то получим изображение выходного сигнала
в виде:
)T,
то получим изображение выходного сигнала
в виде:
![]() . (9.11)
. (9.11)
Поделив изображение выхода (9.11) на изображение входа (9.9), получим передаточную функцию формирующего устройства:
![]() (9.12)
(9.12)
В системах автоматического управления
преимущественно используются формирующие
устройства, удерживающие на выходе
величину, равную
![]() в течение всего периода дискретности
в течение всего периода дискретности![]() В этом случае
В этом случае![]() а само формирующее устройство называется
экстраполятором нулевого порядка.
Передаточная функция (9.12) при
а само формирующее устройство называется
экстраполятором нулевого порядка.
Передаточная функция (9.12) при![]() принимает вид
принимает вид
 (9.13)
(9.13)