

13.2. Синтез цифровых систем
Синтез цифровых систем сводится к выбору цифрового корректирующего устройства с передаточной функцией D(z), последовательное включение которого с объектом управления позволяет получить систему с желаемыми характеристиками (рис. 13.3).
При осуществлении дискретной коррекции желаемая передаточная функция D(z) может быть определена следующим образом.
Пусть известна передаточная функция исходной нескорректированной системы
![]() (13.13)
(13.13)
а в процессе решения задачи синтеза определена желаемая передаточная функция разомкнутой системы
![]() (13.14)
(13.14)
Тогда искомая передаточная функция дискретного корректирующего устройства (передаточная функция ЦВМ)
![]() (13.15)
(13.15)
Формирование желаемой передаточной
функции
![]() должно производиться с учетом некоторых
ограничений. Во-первых, получающаяся
передаточная функция ЦВМ (13.15) должна
быть физически реализуемой, т.е. степень
полинома ее числителя не должна превышать
степени полинома знаменателя. Во-вторых,
скорректированная система должна быть
грубой, т.е. малое изменение ее параметров
не должно приводить к существенному
изменению характера протекающих в ней
процессов.
должно производиться с учетом некоторых
ограничений. Во-первых, получающаяся
передаточная функция ЦВМ (13.15) должна
быть физически реализуемой, т.е. степень
полинома ее числителя не должна превышать
степени полинома знаменателя. Во-вторых,
скорректированная система должна быть
грубой, т.е. малое изменение ее параметров
не должно приводить к существенному
изменению характера протекающих в ней
процессов.
В соответствии с условием грубости нули
и полюсы (корни числителя и знаменателя)
передаточной функции
![]() ,
модуль которых равен или больше единицы,
не должны сокращаться или компенсироваться
такими же полюсами и нулями передаточной
функции D(z).
Невыполнение условий грубости вызывает
неустойчивость системы.
,
модуль которых равен или больше единицы,
не должны сокращаться или компенсироваться
такими же полюсами и нулями передаточной
функции D(z).
Невыполнение условий грубости вызывает
неустойчивость системы.
Рассмотрим синтез разомкнутой цифровой
системы, импульсная переходная функция
которой должна соответствовать импульсной
переходной функции заданного аналогового
эквивалента, т.е.
![]() .
.
Желаемая передаточная функция проектируемой системы при таком методе синтеза определяется как z - преобразование импульсной переходной функции аналогового эквивалента:
![]() (13.16)
(13.16)
Пример
Найти передаточную функцию цифрового
корректирующего устройства в разомкнутой
системе, предназначенной для управления
астатическим объектом, передаточная
функция которого с формирующим элементом
![]() (рис. 13.4 а).
(рис. 13.4 а).
Передаточная функция аналогового эквивалента задана в виде (рис. 13.4 б)
![]()
Pе ш е н и е.
В соответствии с формулой (4.41) импульсная переходная (или весовая) функция первого звена аналогового эквивалента
 (13.17)
(13.17)
По формуле (4.42) при начальном условии
![]() найдем импульсную переходную функцию
аналогового эквивалента:
найдем импульсную переходную функцию
аналогового эквивалента:
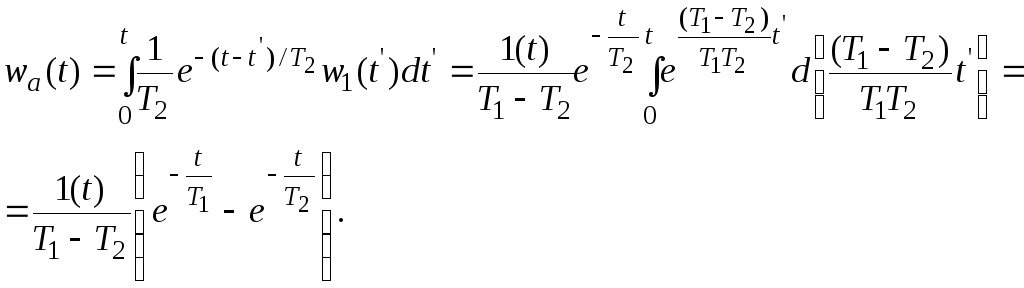 (13.18)
(13.18)
В соответствии с выражением (13.18)
определяем дискретную передаточную
функцию
![]() :
:
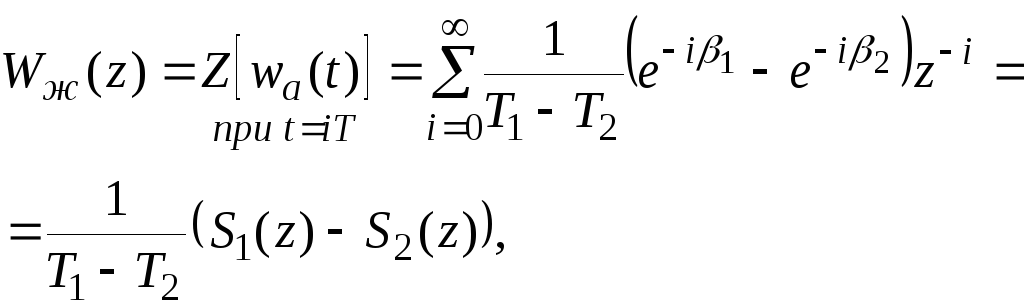 (13.19)
(13.19)
где
![]()
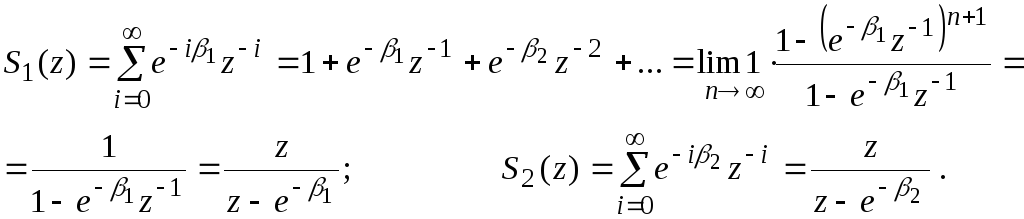
Подставляя выражения
![]() в (13.19), получим
в (13.19), получим
![]() (13.20)
(13.20)
где
![]()
Передаточная функция
![]() определена в примере раздела 11.2:
определена в примере раздела 11.2:
![]() (13.21)
(13.21)
Передаточная функция цифрового корректирующего устройства согласно (13.15) имеет вид:
![]() (13.22)
(13.22)
где
![]() - коэффициент передачи корректирующего
устройства.
- коэффициент передачи корректирующего
устройства.
Цифровая система, спроектированная
данным методом, совпадает по своим
свойствам с аналоговым эквивалентом
только в смысле равенства дискретных
значений импульсных переходных функций,
т.е. при входном сигнале в виде
![]() - функции.
При других входных сигналах совпадение
дискретных значений выходных сигналов
в цифровой системе и аналоговом
эквиваленте не гарантируется.
- функции.
При других входных сигналах совпадение
дискретных значений выходных сигналов
в цифровой системе и аналоговом
эквиваленте не гарантируется.