

7.2. Общая характеристика критериев устойчивости
Критериями устойчивости называют правила, которые позволяют определить устойчивость системы без вычисления корней характеристического уравнения.
Критерии устойчивости можно разбить на две группы: алгебраические и частотные. К алгебраическим критериям относят критерий устойчивости Рауса и критерий устойчивости Гурвица. Эти критерии для систем, описываемых дифференциальными уравнениями выше 4-й степени, дают лишь возможность определить, устойчива ли система. Но их применение для определения изменения параметров системы с тем, чтобы сделать ее устойчивой, затруднительно.
Частотные критерии могут быть разделены на две подгруппы:
1. Исследуется непосредственно замкнутая система (критерий устойчивости Михайлова).
2. Об устойчивости замкнутой системы судят по частотным характеристикам разомкнутой системы (критерий устойчивости Найквиста).
Достоинством частотных критериев является наглядность и возможность использования частотных характеристик, полученных экспериментально. Во многих случаях частотные критерии устойчивости дают представление о качестве процесса регулирования.
7.3. Критерий устойчивости Гурвица
Этот критерий был сформулирован в 1895 году математиком А. Гурвицем.
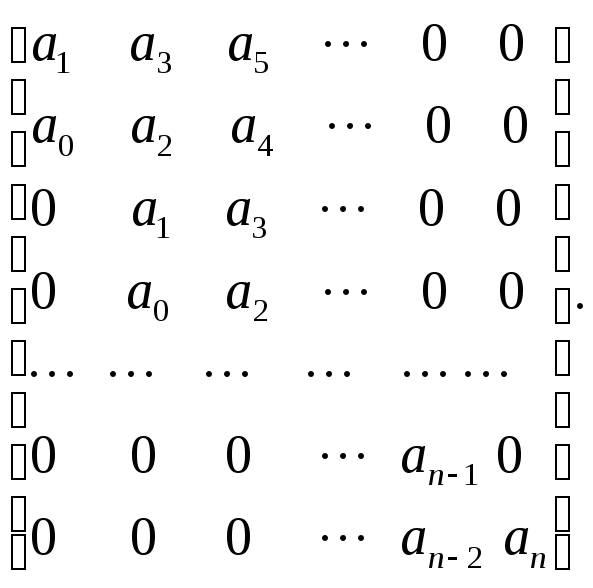
Для характеристического уравнения (7.16) составим квадратную матрицу коэффициентов, содержащую nстрок иnстолбцов:
 (7.22)
(7.22)
Эта матрица составляется следующим образом.
По диагонали от левого верхнего до
правого нижнего углов записывают все
коэффициенты по порядку от
![]() до
до![]() .
Каждая строка дополняется коэффициентами
с нарастающими индексами слева направо
так, чтобы чередовались строки с нечетными
и четными индексами. В случае отсутствия
коэффициента, а также, если индекс его
должен быть меньше нуля или больше n,
на соответствующем месте в матрице
(7.22) пишут нуль.
.
Каждая строка дополняется коэффициентами
с нарастающими индексами слева направо
так, чтобы чередовались строки с нечетными
и четными индексами. В случае отсутствия
коэффициента, а также, если индекс его
должен быть меньше нуля или больше n,
на соответствующем месте в матрице
(7.22) пишут нуль.
Критерий устойчивости сводится к тому,
что при
![]() должны быть больше нуля всеnопределителей Гурвица, получаемых из
квадратной матрицы коэффициентов.
Обозначим определители Гурвица символами
должны быть больше нуля всеnопределителей Гурвица, получаемых из
квадратной матрицы коэффициентов.
Обозначим определители Гурвица символами![]()
Индексы определителей Гурвица указывают их порядок, а также индекс диагонального коэффициента матрицы (7.22), который занимает место в правом нижнем углу соответствующего определителя Гурвица.
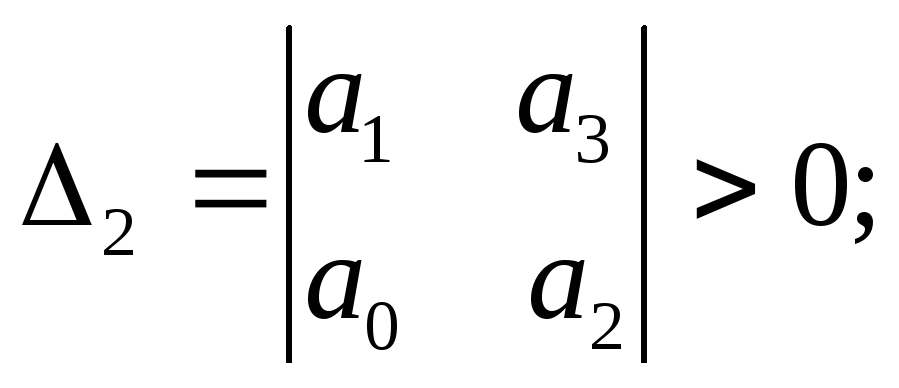
Условия устойчивости по критерию Гурвица записываются в виде:
![]() ;
;
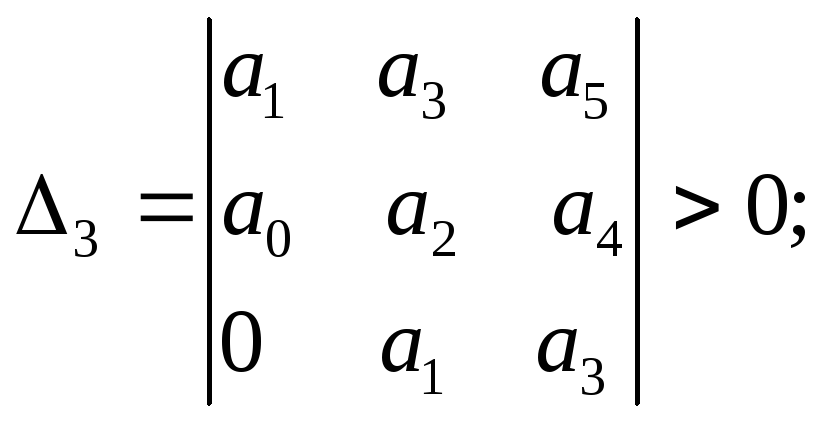 ….;
….;![]()
Последний определитель включает в себя
всю матрицу. Но так как в последнем
столбце матрицы все элементы, кроме
нижнего, равны нулю, то последнее
неравенство запишем в виде: ![]()
Так как предыдущее неравенство имеет
вид
![]() то условие положительности определителя
то условие положительности определителя![]() ,
сводится к условию
,
сводится к условию![]()
Таким образом, критерий Гурвица
формулируется следующим образом: для
того, чтобы система была устойчива,
необходимо и достаточно, чтобы при
![]() определители Гурвица
определители Гурвица![]() были положительными.
были положительными.
Необходимые, но недостаточные, условия
устойчивости заключаются в том, что в
случае уравнения n-го
порядка все коэффициенты![]() должны быть положительны и ни один из
них не должен равняться нулю.
должны быть положительны и ни один из
них не должен равняться нулю.
7.4. Принцип аргумента
Рассмотрим алгебраическое уравнение
n-й степени с
действительными коэффициентами:![]()
Если через
![]() обозначить корни этого уравнения, то
многочлен
обозначить корни этого уравнения, то
многочлен![]() можно представить в виде произведения
простых сомножителей:
можно представить в виде произведения
простых сомножителей: ![]()
На комплексной плоскости
![]() каждому корню соответствует вполне
определенная точка. Геометрически
каждый корень
каждому корню соответствует вполне
определенная точка. Геометрически
каждый корень![]() можно изобразить в виде вектора,
проведенного из начала координат к
точке (
можно изобразить в виде вектора,
проведенного из начала координат к
точке (![]() где
где![]() - вещественная часть корня
- вещественная часть корня![]() ,
а
,
а![]() - мнимая (рис. 7.1 а).
- мнимая (рис. 7.1 а).
Если положить
![]() в
в![]() то
то
![]() (7.23)
(7.23)
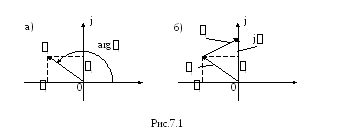 Изобразим
на комплексной плоскости элементарный
вектор
Изобразим
на комплексной плоскости элементарный
вектор![]() (рис. 7.1 б). Этот вектор
является разностью двух векторов:
вектора
(рис. 7.1 б). Этот вектор
является разностью двух векторов:
вектора![]() и
вектора
и
вектора![]() Концы элементарных векторов
Концы элементарных векторов![]() находятся на мнимой оси в точке
находятся на мнимой оси в точке![]() ,
а начала – в точках с координатами
,
а начала – в точках с координатами![]() .
При измененииот 0 доконцы векторов
.
При измененииот 0 доконцы векторов![]() скользят по мнимой оси, а векторы
скользят по мнимой оси, а векторы![]() при этом поворачиваются. Направление
вращения вектора против часовой стрелки
с ростом
при этом поворачиваются. Направление
вращения вектора против часовой стрелки
с ростом![]() принимают за положительное. Если начало
вектора
принимают за положительное. Если начало
вектора![]() лежит в левой части комплексной плоскости
(вещественная часть корняiотрицательная), то при измененииот 0 довектор
лежит в левой части комплексной плоскости
(вещественная часть корняiотрицательная), то при измененииот 0 довектор![]() вращается в положительную сторону и
изменение его аргумента
вращается в положительную сторону и
изменение его аргумента
![]()
Для всех корней ![]()
Начальные значения аргументов векторов
![]() различны в зависимости от четырёх
возможных вариантов расположения корней
на комплексной плоскости (рис. 7.2).
Найдем изменение аргумента элементарных
векторов
различны в зависимости от четырёх
возможных вариантов расположения корней
на комплексной плоскости (рис. 7.2).
Найдем изменение аргумента элементарных
векторов![]() при измененииот 0 до
при измененииот 0 до![]() для приведённых на рис.7.2 вариантов
расположения корней.
для приведённых на рис.7.2 вариантов
расположения корней.
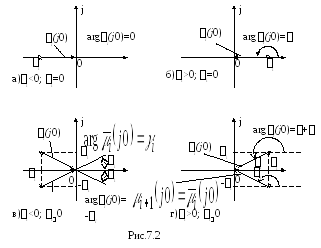
Вариант 1. Вещественный корень в левой части КП.
![]()
Вариант 2. Вещественный корень в правой части КП.
![]()
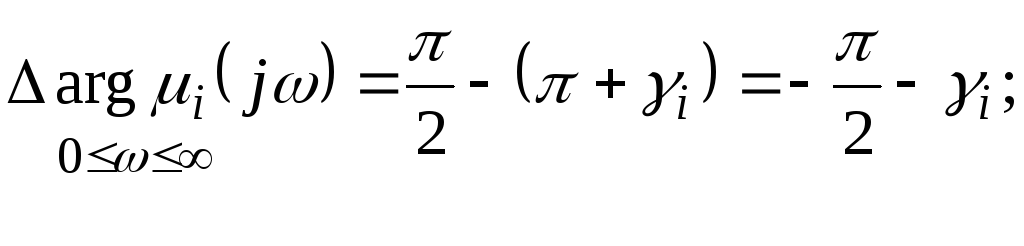
Вариант 3. Пара комплексно-сопряженных корней в левой части КП.
![]()

Векторы
![]() и
и![]() запишем в показательной форме:
запишем в показательной форме:
![]()
![]() ,
,
где
![]()
![]()
В выражении для полинома
![]() векторы
векторы![]() и
и![]() являются сомножителями. Запишем формулу
для произведения векторов
являются сомножителями. Запишем формулу
для произведения векторов![]() и
и![]() :
:![]()
Найдем изменение аргумента произведения
векторов
![]() и
и![]() при измененииот 0 до
при измененииот 0 до![]() :
:
 .
.
Вариант 4.Пара комплексно-сопряженных корней в правой части КП.
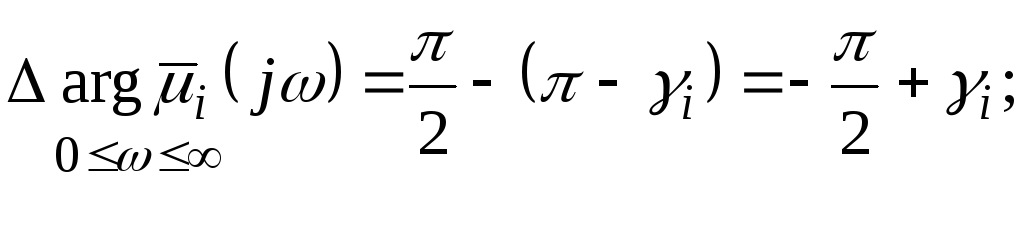
По аналогии вариантом 3 найдем изменение
аргумента произведения векторов
![]() и
и![]() при измененииот 0 до
при измененииот 0 до![]() :
:
 .
.
Запишем выражение для вектора
![]() (см. (7.23)).
(см. (7.23)).

Аргумент (или фаза) вектора
![]() равен сумме аргументов элементарных
векторов:
равен сумме аргументов элементарных
векторов:![]()
Предположим, что уравнение
![]() =0
имеетmкорней в правой
части КП и, следовательно,n-mкорней в левой части КП. Пусть при этомqправых корней иrлевых корней – вещественные. Тогда в
правой части КП количество пар
комплексно-сопряженных корней будет
равно (m-q)/2
а в левой (n-m-r)/2
При возрастанииот 0 до
=0
имеетmкорней в правой
части КП и, следовательно,n-mкорней в левой части КП. Пусть при этомqправых корней иrлевых корней – вещественные. Тогда в
правой части КП количество пар
комплексно-сопряженных корней будет
равно (m-q)/2
а в левой (n-m-r)/2
При возрастанииот 0 до![]() изменение аргумента вектора
изменение аргумента вектора![]() или угол поворота
или угол поворота![]() будет
будет

Если все корни уравнения
![]() =0
находятся в левой части КП, то
=0
находятся в левой части КП, то
![]()