

4.2. Типовые динамические звенья второго порядка
В общем случае дифференциальное уравнение звена второго порядка можно записать в виде:
![]() . (4.45)
. (4.45)
Символическая запись уравнения (4.45):
![]() (4.46)
(4.46)
Данное уравнение имеет смысл анализировать лишь в случае, когда полиномы, заключенные в скобки, не имеют вещественных корней и не могут быть разложены на более простые сомножители. С этой точки зрения уравнением (4.45) можно описать динамику двух типовых звеньев.
4.2.1. Колебательное звено Колебательное звено имеет передаточную функцию
![]() (4.47)
(4.47)
где Тk–
постоянная времени,![]() - коэффициент демпфирования,k– передаточный коэффициент. Уравнение
колебательного звена получим из (4.45)
при
- коэффициент демпфирования,k– передаточный коэффициент. Уравнение
колебательного звена получим из (4.45)
при![]()
![]() (4.48)
(4.48)
где 
Чтобы корни характеристического уравнения
![]() (4.49)
(4.49)
были комплексно-сопряженными, коэффициент
демпфирования
![]() должен находиться в интервале 0<k<1.
При
должен находиться в интервале 0<k<1.
При![]() =0
получим так называемое консервативное
звено с передаточной функцией
=0
получим так называемое консервативное
звено с передаточной функцией
![]() (4.50)
(4.50)
Такая система не рассеивает энергии и
в ней протекают незатухающие колебания.
Если
![]() >1,
то звено может быть представлено в виде
двух последовательно соединенных
апериодических звеньев с различными
постоянными времени, если
>1,
то звено может быть представлено в виде
двух последовательно соединенных
апериодических звеньев с различными
постоянными времени, если![]() =1,
то апериодические звенья имеют одинаковые
постоянные времени.
=1,
то апериодические звенья имеют одинаковые
постоянные времени.
В качестве примера колебательного звена рассмотрим RLС-цепочку (рис. 4.10).
По второму закону
Кирхгофа: ![]() (4.51)
(4.51)
где ![]()
И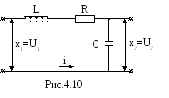 сключая
промежуточные переменные
сключая
промежуточные переменные![]() приведём уравнение (4.51) к виду:
приведём уравнение (4.51) к виду:
![]() (4.52)
(4.52)
Уравнение (4.52) совпадает
с (4.48) при k=1,![]()
Характеристики звена:
а) Переходную характеристику колебательного
звена находим как решение дифференциального
уравнения (4.48) при нулевых начальных
условиях
![]() и входном воздействии
и входном воздействии![]()
Решение уравнения (4.48) есть сумма решения однородного уравнения
![]() (4.53)
(4.53)
и частного решения уравнения (4.48), которое
здесь можно считать константой, равной
![]()
Однородному уравнению (4.53) соответствует характеристическое уравнение
![]() (4.54)
(4.54)
корни которого при условии
![]() комплексно-сопряжённые:
комплексно-сопряжённые:
![]() (4.55)
(4.55)
Обозначим:
![]() Величину
Величину![]() называют частотой недемпфированных
колебаний или собственной частотой.
Величина
называют частотой недемпфированных
колебаний или собственной частотой.
Величина![]() называемая декрементом колебаний,
показывает скорость изменения амплитуды
колебаний со временем, а величина
называемая декрементом колебаний,
показывает скорость изменения амплитуды
колебаний со временем, а величина![]() есть частота свободных колебаний
выходной величины
есть частота свободных колебаний
выходной величины![]() .
.
Решение уравнения (4.48) может быть записано так:
![]() (4.56)
(4.56)
Продифференцируем выражение (4.56) по времени:
![]() (4.57)
(4.57)
Подставив в (4.56) и (4.57) начальные условия, получим:
 (4.58)
(4.58)
Из уравнений (4.58) находим константы интегрирования А1и А2:
![]() (4.59)
(4.59)
Подставив (4.59) в выражение (4.56), получим переходную функцию колебательного звена:

 (4.60)
(4.60)
где ![]()
В первоначальных обозначениях решение (4.60) примет вид:
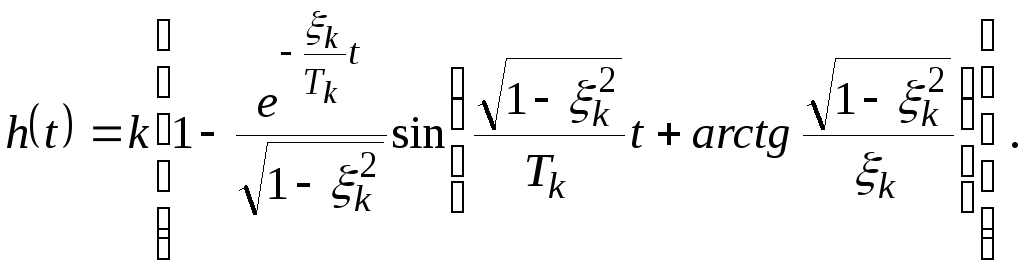 (4.61)
(4.61)
В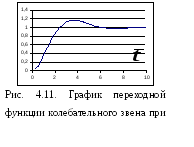 качестве примера на рис. 4.11 изображен
график переходной функции колебательного
звена для случая
качестве примера на рис. 4.11 изображен
график переходной функции колебательного
звена для случая![]() иk=1
иk=1
![]() где
где![]() .
.
б) Частотные характеристики колебательного звена имеют вид
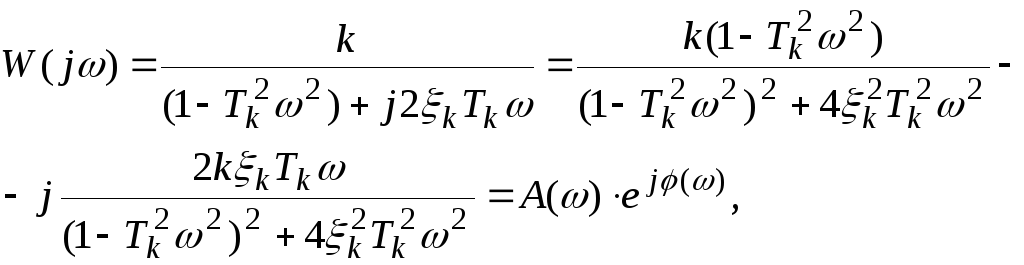 (4.62)
(4.62)
где АЧХ: ![]() (4.63)
(4.63)
ФЧХ: 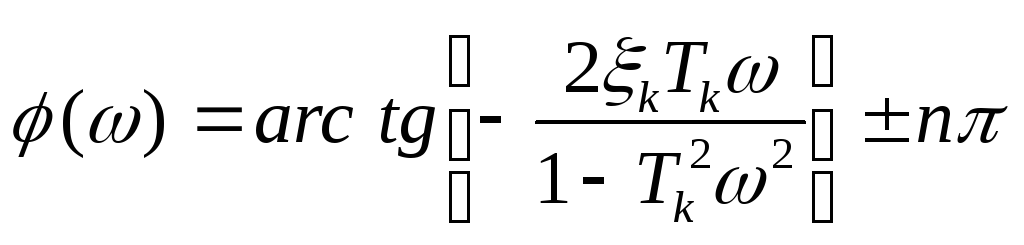 . (4.64)
. (4.64)
Из выражения (4.64) видно, что при изменении
частоты от 0 до
![]() в точке=a=1/Tk
аргумент функцииarctgтерпит разрыв 2-го рода. Так как
в точке=a=1/Tk
аргумент функцииarctgтерпит разрыв 2-го рода. Так как![]() есть непрерывная функция частоты,
построение ФЧХ следует выполнять по
формулам:
есть непрерывная функция частоты,
построение ФЧХ следует выполнять по
формулам:
![]()
![]() (4.65)
(4.65)
АФХ звена показана на рис. 4.12. Она
начинается на действительной оси в
точке kпри![]() При частоте
При частоте![]() кривая подходит к началу координат и
касается действительной оси. При этом
вектор
кривая подходит к началу координат и
касается действительной оси. При этом
вектор![]() п
п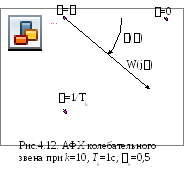 риближается
к отрицательному направлению вещественной
оси. Выходная величина при частоте
риближается
к отрицательному направлению вещественной
оси. Выходная величина при частоте![]() отстает от входной на 180.
отстает от входной на 180.
в) ЛАХ колебательного звена описывается выражением
![]() (4.66)
(4.66)
При значениях частоты <1/Tkи>1/TkЛАХ (2.116) может быть приближенно заменена прямыми линиями (асимптотами)

ЛАХ колебательного звена при малых асимптотически стремится к прямой![]() имеющей нулевой наклон, а при большихасимптотически
стремится к прямой
имеющей нулевой наклон, а при большихасимптотически
стремится к прямой![]() имеющей наклон – 40 дБ на декаду:
имеющей наклон – 40 дБ на декаду:
![]()
Кривые
![]() в зависимости от величины
в зависимости от величины![]() могут иметь существенный пик при
могут иметь существенный пик при![]()
![]()
т.е. при
![]() величина пика по сравнению с величиной
асимптотической ЛАХ
величина пика по сравнению с величиной
асимптотической ЛАХ![]() равна
равна![]() .
Например, при
.
Например, при![]() пик составляет 0 дБ, а при
пик составляет 0 дБ, а при![]() величина пика равна 20 дБ. График ЛФХ
строят по формулам (4.65).
величина пика равна 20 дБ. График ЛФХ
строят по формулам (4.65).
На рис. 4.13 приведены графики ЛАХ и ЛФХ
для значений
![]() ,k=1, а по оси частот
отложены значения нормированной частоты
,k=1, а по оси частот
отложены значения нормированной частоты![]() .
.