

4.2.2. Дифференцирующее звено второго порядка
Дифференцирующее звено 2-го порядка
имеет передаточную функцию вида
![]() , (4.67)
, (4.67)
где k– передаточный коэффициент,d– постоянная времени,d– коэффициент демпфирования.
 Предполагается,
что корни уравнения
Предполагается,
что корни уравнения![]() комплексно – сопряженные, т.е. выполняется
условие
комплексно – сопряженные, т.е. выполняется
условие![]() .
.
Дифференциальное уравнение такого звена имеет вид
 и
может быть получено из (4.45) приа0=а1=0.
В этом случае
и
может быть получено из (4.45) приа0=а1=0.
В этом случае
Характеристики звена:
а) Переходная характеристика
![]() . (4.68)
. (4.68)
При скачкообразном изменении входной
величины в момент времени t=0
на выходе получаются импульсы бесконечно
большой амплитуды: 1) от 0 до![]() ;
2) от
;
2) от![]() до
до![]() ;
3) от
;
3) от![]() до
до![]()
б) Частотные характеристики дифференцирующего звена второго порядка описываются формулой
![]() (4.69)
(4.69)
где АЧХ: ![]() (4.70)
(4.70)
ФЧХ: 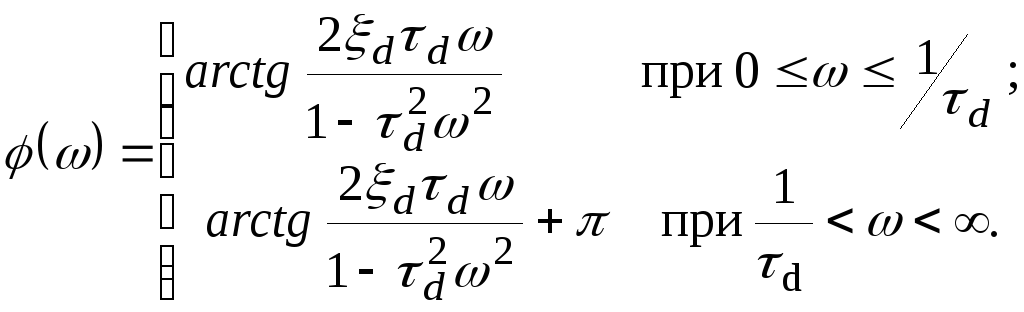 (4.71)
(4.71)
АФХ звена представляет собой параболу
![]() (4.72)
(4.72)
которая начинается из точки
![]() при
при![]() (рис. 4.14).
(рис. 4.14).
Дифференцирующее звено второго порядка
при частоте
![]() вносит опережение по фазе, стремящееся
к 1800.
вносит опережение по фазе, стремящееся
к 1800.
в) ЛАХ звена определяется формулой
![]() (4.73)
(4.73)
Е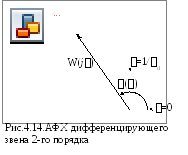 сли
сравнить формулу (4.73) с формулой (4.66)
ЛАХ колебательного звена, то при
сли
сравнить формулу (4.73) с формулой (4.66)
ЛАХ колебательного звена, то при![]() и
и![]() они отличаются друг от друга только
знаком перед вторым слагаемым. Поэтому
для дифференцирующего звена второго
порядка кривая
они отличаются друг от друга только
знаком перед вторым слагаемым. Поэтому
для дифференцирующего звена второго
порядка кривая![]() может быть получена как зеркальное
отображение относительно прямой
может быть получена как зеркальное
отображение относительно прямой![]() ЛАХ колебательного звена, а кривая ЛФХ
ЛАХ колебательного звена, а кривая ЛФХ![]() может быть получена как зеркальное
отображение относительно оси частот
ЛФХ колебательного звена.
может быть получена как зеркальное
отображение относительно оси частот
ЛФХ колебательного звена.
4.3. Запаздывающее звено Уравнение запаздывающего звена(4.74)
где - постоянное запаздывание.
Уравнение вида (4.74) называют уравнением с запаздывающим аргументом. Применим к уравнению (4.74) преобразование Лапласа.
![]() (4.75)
(4.75)
Левый интеграл есть изображение выходной
величины
![]()
![]() (4.76)
(4.76)
Правый интеграл приведем к одному
параметру интегрирования
![]() :
:
 (4.77)
(4.77)
Первый интеграл в (4.77) равен нулю, т.к.
![]() Заменим во втором интеграле параметр
интегрирования:
Заменим во втором интеграле параметр
интегрирования:![]() .
При
.
При![]()
![]() при
при![]()
![]() .
(4.78)
.
(4.78)
Подставляя (4.78) в (4.77), получим:
![]() (4.79)
(4.79)
Подставляя в (4.75) выражения (4.76) и (4.79),
окончательно получим: ![]() (4.80)
(4.80)
Передаточная функция запаздывающего звена
![]() . (4.81)
. (4.81)
Характеристики звена:
а) Переходная функция ![]() (4.82)
(4.82)
представляет собой единичную ступенчатую функцию, сдвинутую во времени относительно входного скачка на величину .
б) Весовая функция точно также, как и переходная, повторяет входное воздействие с запаздыванием во времени на величину :
![]()
в) Частотные характеристики звена определяются формулой
![]() (4.83)
(4.83)
АЧХ запаздывающего звена
![]() ФЧХ:
ФЧХ:![]()
АФХ представляет собой окружность
единичного радиуса с центром в начале
координат. При увеличении частоты вектор
![]() вращается по часовой стрелке.
вращается по часовой стрелке.
Тема 5. Структурные схемы непрерывных сау
5.1. Общие понятия о структурной схеме
Ч асто
систему автоматического управления
можно рассматривать как комбинацию
динамических звеньев с определёнными
типовыми или нетиповыми передаточными
функциями. Изображение системы
регулирования в виде совокупности
динамических звеньев с указанием связей
между ними носит название структурной
схемы. Структурная схема
асто
систему автоматического управления
можно рассматривать как комбинацию
динамических звеньев с определёнными
типовыми или нетиповыми передаточными
функциями. Изображение системы
регулирования в виде совокупности
динамических звеньев с указанием связей
между ними носит название структурной
схемы. Структурная схема
|
Наименование |
Обозначение |
Уравнение |
|
Звено |
|
|
|
Узел (разветвление линии связи) |
|
|
|
Сумматор |
|
|
|
Элемент сравнения (для отрицательных обратных связей) |
|
|



может быть составлена на основе известных уравнений системы, и наоборот, уравнения системы могут быть получены из структурной схемы. Однако первая задача может иметь различные варианты решения (различные структурные схемы для одной и той же математической модели САУ), тогда как вторая задача имеет всегда единственное решение.
Элементы структурных схем приведены в таблице 5.1.