

Тема 8. Оценка качества управления и синтез непрерывных сау 97
8.2. Теорема о конечном значении 99
8.3. Точность в типовых режимах 100
Задающее воздействие принимается изменяющимся по закону 103
8.4. Определение запаса устойчивости и быстродействия по переходной характеристике 105
8.5. Оценка качества переходного процесса по логарифмическим частотным характеристикам разомкнутой системы 106
8.6. Синтез систем автоматического управления 111
8.6.1. Общие понятия 111
8.6.2. Этапы синтеза методом ЛАХ 111
Рассмотрим упрощённую методику синтеза САУ методом ЛАХ на примере следящей системы, структурная схема которой приведена на рис.7.6. Передаточная функция разомкнутой системы имеет вид: 115
(8.16) 115
где К – коэффициент усиления разомкнутой системы (добротность САУ по скорости). 115
118
Тема 9. Математическая модель импульсного элемента 118
9.1. Общие сведения об импульсных системах 118
9.2. Вывод уравнений импульсного элемента 120
Тема 10. Разностные уравнения импульсных систем 123
10.2. Решение разностных уравнений 125
10.3. Составление разностных уравнений импульсной системы 129
11.1. Понятие о z-преобразовании 130
11.2. Определение передаточных функций импульсной системы. 134
Тема 12. Устойчивость и оценка качества импульсных систем 137
12.1. Исследование устойчивости по корням характеристического уравнения 137
12.2. Частотный критерий Найквиста 139
12.3. Оценка качества импульсных систем 144
Тема 13. Цифровые системы 147
13.1. Общие сведения 147
13.2. Синтез цифровых систем 154
13.3. Использование микропроцессорных средств в цифровых системах 158
Список литературы 163
Тема 1. Общие сведения о системах автоматического управления
1.1. Основные понятия и определения
Система управления (СУ)– совокупность управляющего устройства (УУ) и объекта управления (ОУ), действия которой направлены на достижение некоторого результата – цели управления (рис.1.1.).
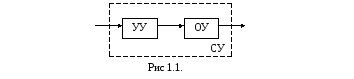
Объект управления(ОУ) – устройство, в котором происходит подлежащий управлению процесс.
Управляющее устройство(УУ) – устройство, предназначенное для выполнения задачи управления. УУ реализует следующие функции:
а) сбор информации; б) переработку информации;
в) передачу информации; г) выработку команд управления.
На функциональных и структурных схемах элементы СУ изображают в виде звеньев, соединенных линиями связи. Стрелки на линиях связи показывают направление передачи информации. Будем считать, что в обратном направлении информация не передается.
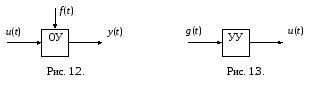
На рис. 1.2. показано возможное изображение ОУ на функциональной схеме.
 Обозначения
на рис. 1.2.:y(t)
– управляемая величина – физическая
величина, принадлежащая ОУ и подвергающаяся
управлению, т.е. величинуy(t)
необходимо поддерживать постоянной
или изменять по некоторой программе.
Обозначения
на рис. 1.2.:y(t)
– управляемая величина – физическая
величина, принадлежащая ОУ и подвергающаяся
управлению, т.е. величинуy(t)
необходимо поддерживать постоянной
или изменять по некоторой программе.
u(t) – управляющее воздействие – физическая величина, внешняя по отношению к ОУ, которая формируется в УУ и осуществляет выполнение задачи управления.
f(t) – возмущающее воздействие – физическая величина, внешняя по отношению к ОУ, вызывающая нежелательное изменение управляемой величины.
На рис. 1.3. показано возможное изображение УУ на функциональной схеме.
Обозначения на рис. 1.3:
u(t) – команда управления – управляющее воздействие для ОУ
g(t) – задающее воздействие – физическая величина, определяющая программу работы СУ.
Система управления, выполняющая поставленную перед ней задачу без непосредственного участия человека (оператора), называется системой автоматического управления (САУ).
Общими принципами и методами построения САУ занимается наука, которая называется теория автоматического управления (ТАУ).