

§ 2. Координатный способ задания движения точки.
Координатный способ легко может быть получен из векторного. Точку отсчёта
(полюс) О примем за начало координат, например, прямоугольных осей XYZ (рис.4).
Тогда положение точки М в пространстве
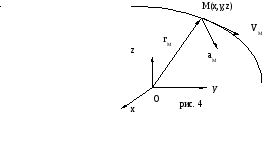 можно
задать координатами XM;YM;ZM,
а
можно
задать координатами XM;YM;ZM,
а
введённые в векторном способе векторы
![]() могут быть записаны:
могут быть записаны:
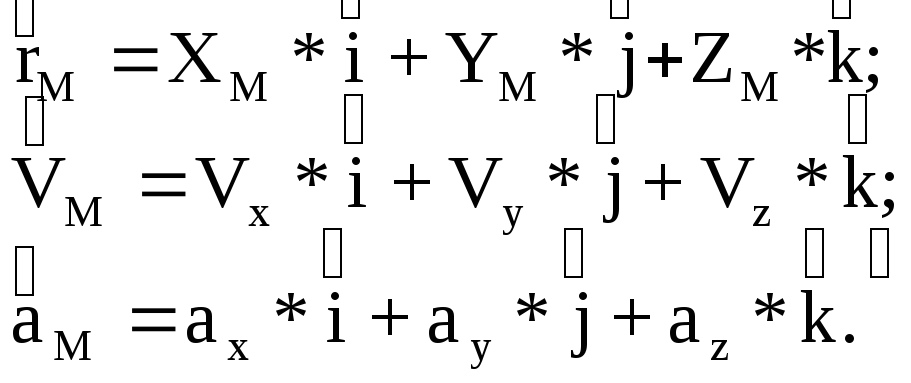
Как видим, в координатном способе векторы
![]() однозначно
определяются их тремя
однозначно
определяются их тремя
проекциями на оси координат.
Уравнения XM=f(t); YM=f(t); ZM=f(t)
называются уравнениями движения точки в координатной форме. Математически их можно рассматривать как уравнения траектории точки в параметрической форме. Исключив параметр t, получим уравнение траектории в координатной форме: Z=f(X,Y).
По определению:
![]()
Следовательно:
![]()
![]() и
и
![]()
Аналогично:
![]()
Следовательно:
![]()
![]()
Пример: Движение точки в плоскости XY задано уравнениями:
![]()
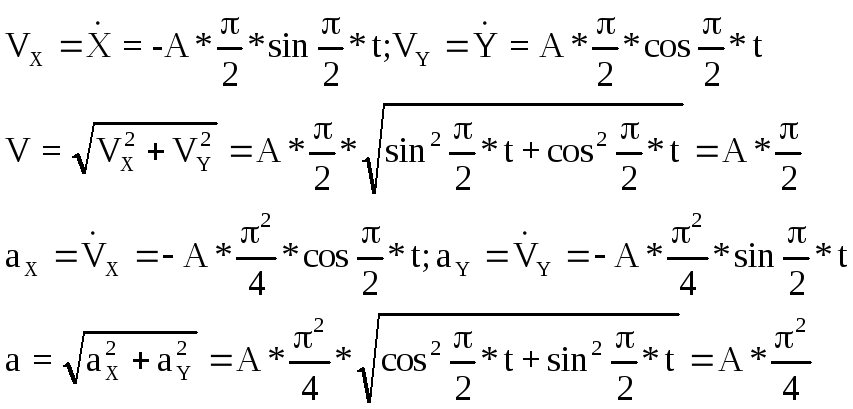
Определить форму траектории и получить формулы для вычисления скорости и ускорения.
Решение:
Исключим параметр t из уравнений движения: сложим
![]()
![]() и
и
![]()
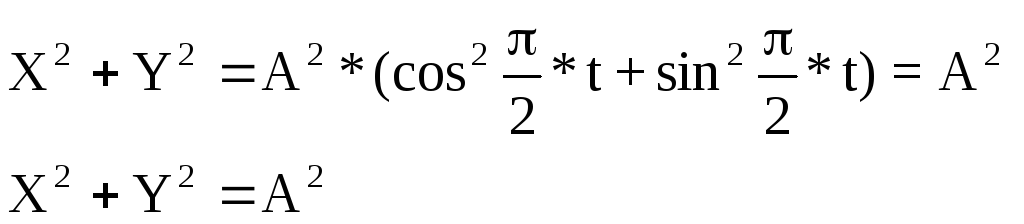
Форма траектории - окружность радиуса А.
§ 3 Естественный метод задания движения точки.
В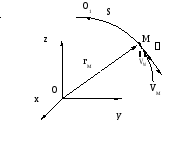 стречаются
задачи, когда траектория точки задана
её условиями. В этом случае положение
точки в пространстве может определяться
криволинейной (дуговой)координатой S,
отмеряемой от некоторой начальной точки
отсчёта О до исследуемой точки М вдоль
траектории (рис.5). Уравнение вида S=f(t)
называется уравнением движения точки
при естественном способе задания её
движения. Рассмотрим теперь методы
определения скорости и ускорения точки
при естественном способе задания
движения:
стречаются
задачи, когда траектория точки задана
её условиями. В этом случае положение
точки в пространстве может определяться
криволинейной (дуговой)координатой S,
отмеряемой от некоторой начальной точки
отсчёта О до исследуемой точки М вдоль
траектории (рис.5). Уравнение вида S=f(t)
называется уравнением движения точки
при естественном способе задания её
движения. Рассмотрим теперь методы
определения скорости и ускорения точки
при естественном способе задания
движения:
1)По определению
![]()
Представим:
![]() ,
где
,
где
![]() единичный
вектор,
единичный
вектор,
касательный к траектории в точке М
и направленный в строну увеличения
дуговой координаты.
![]() - алгебраическая
величина (модуль)
- алгебраическая
величина (модуль)
скорости; может принимать как положительные так и отрицательные значения.
Таким образом:
![]()
По определению:
![]()
Замечаем, что при таком представлении вектор ускорения раскладывается на две составляющие.
Рассмотрим их геометрический смысл.
Видно, что первое
слагаемое проектируется на касательную
к траектории и называется касательным
ускорением.
![]()
Покажем, что второе слагаемое проектируется на нормаль к траектории и поэтому называется нормальным ускорением.
 Представим:
Представим:
![]()
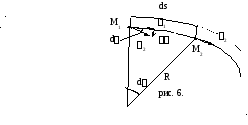
Геометрический смысл производной
![]() можно уяснить из
рис.6 .
можно уяснить из
рис.6 .
Определим модуль вектора
![]() :
:
dS=R*dЄ
d![]() Є=dЄ(
Є=dЄ(![]() )
)
Таким образом:
![]()
Определим направление
вектора
![]() .
.
В заштрихованном равнобедренном треугольнике сумма углов
dЄ+2*![]() ,откуда
,откуда
![]() Є
Є
При ds![]() Є
Є![]()
![]() Следовательно,
в пределе
Следовательно,
в пределе
![]() ,
таким образом вектор
,
таким образом вектор![]() нормален к касательной и направлен к
центру кривизны траектории. Окончательно:
нормален к касательной и направлен к
центру кривизны траектории. Окончательно:
![]()
В озвратимся
теперь к полному выражению для ускорения
точки при естественном способе задания
её движения
озвратимся
теперь к полному выражению для ускорения
точки при естественном способе задания
её движения
![]()
Касательная составляющая полного ускорения
характеризует изменение скорости по величине
(при V=const
![]() ).
).
Нормальная составляющая полного ускорения
характеризует изменение вектора скорости по
направлению (при
движении по прямой R=![]() и
и![]() )
)
В общем случае
![]() ;
;
При рассмотрении естественного способа задания движения точки введены понятия касательной и нормальной осей к траектории в точке М. Эти оси называются естественными осями координат. Их особенностью является движение вместе с точкой М по траектории, они поворачиваются вместе с изгибами траектории (рис.8).
Рассмотрим теперь один из
способов установления аналитической
связи между проекциями ускорения точки
в естественных и прямоугольных осях
координат.
Имеем выражение для модуля
с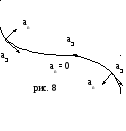 корости
точки
корости
точки![]()
Продифференцируем это выражение
по времени:

Таким образом
![]() и
и![]()
Пример: Точка движется по окружности радиуса R=1м согласно уравнению S=¶ * t,м. Определить скорость, касательное, нормальное и полное ускорения точки при t=1с.
Решение:
![]() [м/c]
[м/c]
![]() [м/с2]
[м/с2]
![]() [м/c2]
[м/c2]
![]() [м/c2]
[м/c2]