

Тема 6. Простейшие движения тела.
В кинематике различают пять видов движения твёрдого тела:
1.Поступательное
2.Вращательное
3.Плоское (плоскопараллельное)
4.Сферическое
5.Свободное
Поступательное и вращательное движения называют простейшими видами движения. Остальные виды движения являются сложными, так как их можно представить определённой совокупностью простейших.
Движение твёрдого тела вполне определяется движением трёх его точек, не лежащих на одной прямой (при движении тела параллельно некоторой таких точек достаточно двух).
Для твёрдого (недеформируемого) тела простым логическим рассуждением можно доказать следующую теорему:
Основная теорема кинематики твёрдого тела:
Проекции скоростей двух любых точек твёрдого тела на линию, проходящую через эти точки, при любом движении тела равны между собой.
VA
Действительно,
если бы
![]() ,
,
т


![]()
м A

ч





 то
для недеформируемого тела
то
для недеформируемого тела
B![]()
 невозможно.
невозможно.
VB
![]()
С помощью этой теоремы можно
решить ряд задач по определению
с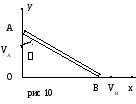 коростей
точек тела.
коростей
точек тела.
Пример: Вычислить скорость
точки В стержня АВ, движущегося
вдоль стенок прямого угла, в
указанном на чертеже положении.
![]()
или
![]() .
.
§1. Поступательное движение твёрдого тела.
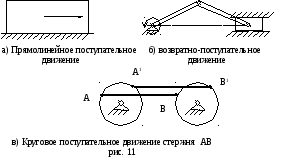
Поступательным называется такое движение тела, при котором прямая, соединяющая две любые точки тела, движется параллельно своему начальному положению.
Характерным отличительным признаком поступательного движения является отсутствие вращения (=0). Поступательное движение может быть как плоским так и пространственным.
Примеры поступательного движения:
Для поступательного движения тела справедлива следующая теорема:
Теорема: Если тело движется поступательно, то все его точки описывают одинаковые траектории и в каждый момент времени имеют геометрически одинаковые скорости и ускорения.
Доказательство:
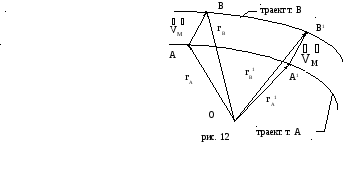
Для слежения за телом выделим на нём произвольный отрезок АВ.
По определению этот отрезок должен быть неизменяемым по величине(твёрдое тело) и по
направлению(поступательное
движение). Обозначим отрезок АВ вектором
![]() .
Проведём
.
Проведём
из произвольного
неподвижного центра О радиусы - векторы
точек тела А и В
![]() Из рис.12 в
Из рис.12 в
любой момент
времени
![]()
![]()
![]()
![]()
В этом выражении с течением времени
векторы
![]() изменяются по величине и направлению,
вектор же
изменяются по величине и направлению,
вектор же![]() неизменен. Из рис.12 также следует, что
при поступательном движении расстояние
между траекториями любых точек А и В
сохраняется неизменным, т.е. траектории
всех точек тела геометрически подобны.
неизменен. Из рис.12 также следует, что
при поступательном движении расстояние
между траекториями любых точек А и В
сохраняется неизменным, т.е. траектории
всех точек тела геометрически подобны.
Для установления связи между скоростями и ускорениями точек тела дважды продифференцируем записанное ранее выражение:
![]() ,
но
,
но
![]() .
.
Следовательно,
![]()
![]() ,
следовательно:
,
следовательно:
![]()
Теорема доказана.
Это свойство поступательного движения тела позволяет свести изучение его движения к изучению движения любой отдельно взятой его точки, используя для этого аппарат кинематики точки.