

§ 3. Теоремы об изменении кинетической энергии.
Кинетическая энергия - некоторая мера механического движения, характеризующая способность материального объекта совершать работу за счёт этого механического движения.
Как правило, работу совершают силы. Исходя из этого, иногда кинетическую энергию называют живой силой.
Рассмотрим более подробно понятия работы и кинетической энергии и установим связь между ними.
а) Работа силы и мощность.
Пусть на некоторый
движущийся материальный объект действует
сила
![]() ,
приложенная в точке А (рис.68).
,
приложенная в точке А (рис.68).
 Элементарной
работой силы
Элементарной
работой силы![]()
на элементарном
перемещении d![]()
называют скалярное произведение:
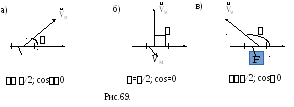
dА=![]() [Hм]
[Hм]
Из определения следует, что в зависимости
от угла между векторами силы и
перемещения элементарная работа
может быть положительной, отрицательной и равной нулю.
Используя свойства скалярного произведения векторов, можно записать:
![]()
Работа силы на конечном перемещении определится интегралом:

Используя полученные выражения, рассмотрим примеры вычисления работы силы в частных случаях:
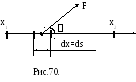
1. Работа постоянной силы на прямолинейном участке перемещения:

2. Работа силы тяжести на любой форме траектории.
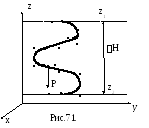
Из рис.71 следует, что FX=FY=0; FZ= -P.
AP= PH
(2)
PH
(2)
Замечаем, что работа силы тяжести не зависит от формы траектории и определяется только перепадом высот Н. Силы, работа которых не зависит от формы пути, называют потенциальными.
3. Работа упругой силы линейной пружины.
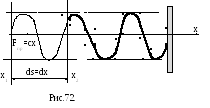
FY=FZ=0; dY=dZ=0
Aпр=![]() (3)
(3)
4. Работа силы, приложенной к вращающемуся телу.
d A=FdS=F
r d,
но Fr=M0,
следовательно:
A=FdS=F
r d,
но Fr=M0,
следовательно:
A= (4 )
(4 )
Работоспособность силы определяется не
только величиной перемещения её точки
приложения, но и скоростью изменения
работы в единицу времени - мощностью
силы. N=![]()
Таким образом: Мощность силы равна скалярному произведению вектора силы на вектор скорости.
Для силы, приложенной к вращающемуся телу
N=![]()
Мощность измеряется:
в СИ - в Ваттах= 1Дж/с=Нм/с (1000Вт=1кВт)
в технической системе единиц - в кГм/с; 75кГм/с=1 лошадиная сила; (1л.с.=736Ватт).
б) Кинетическая энергия материальной точки и механической системы.
Кинетической энергией материальной точки называют скалярную величину, определяемую выражением:
Т=m![]() [кГм2/с2
Джоуль]
[кГм2/с2
Джоуль]
Кинетическая энергия механической системы определяется суммой кинетических энергий материальных точек системы:
Т=![]()
Рассмотрим примеры вычисления кинетической энергии твёрдого тела при различных случаях его движения:
1. При поступательном движении:
При поступательном движении скорости всех точек тела одинаковы, следовательно:
Тпост.=![]() (5)
(5)

2. При вращательном движении:
 При вращательном
движении скорость любой точки тела
равна V=
r i
При вращательном
движении скорость любой точки тела
равна V=
r i
Следовательно,
Tвращ.
=![]() (6)
(6)
3. При плоском движении:
Плоское движение можно представить как совокупность поступательного движения вместе с
п олюсом-
центром масс и вращательного-
олюсом-
центром масс и вращательного-
относительно центра масс.
Следовательно:
Тпл=![]() (7)
(7)
в) Теорема об изменении кинетической
энергии материальной точки.
Запишем основное уравнение динамики точки:
m![]() и умножим его обе части скалярно на
вектор скорости:
и умножим его обе части скалярно на
вектор скорости:
m![]()
Преобразуем: mVd![]() или
или![]() или
или![]()
Таким образом: dТ=dA.
В результате интегрирования будем иметь:
Т=А+С1
(при t=0 Т=Т0, А=0, так что С1=Т0)
Таким образом: Т-Т0=А или
![]() (8)
(8)
Получили выражение, характеризующее Теорему об изменении кинетической энергии материальной точки, которая формулируется следующим образом:
“Изменение кинетической энергии материальной точки при её перемещении на некотором участке пути равно работе силы(равнодействующей сил), приложенной к точке, на этом участке пути.”
г) Теорема об изменении кинетической энергии механической системы.
Кинетическая энергия механической системы определяется выражением:
Т=![]() ,
где Т
i -
кинетическая энергия произвольной
материальной точки системы.
,
где Т
i -
кинетическая энергия произвольной
материальной точки системы.
Для этой точки можно записать:
Т i -Т0i=A i
Просуммировав кинетические энергии для всех точек системы, получим:
Т-Т0 = А (9)
Получили выражение, характеризующее Теорему об изменении кинетической энергии механической системы:
“ Изменение кинетической энергии механической системы равно сумме работ сил, приложенных к точкам системы.”
Примечание: Как указывалось ранее, силы, действующие на точки системы, делятся на внешние и внутренние. Поэтому и сумму работ в выражении (9) можно представить как суммы работ внешних и внутренних сил:
А=![]()
Для механических систем с неизменяемой конфигурацией(твёрдых тел) сумма работ внутренних сил при любом перемещении равна нулю. Поэтому для твёрдых тел выражение (9) запишется в виде:
Т-Т0=![]() (9 a)
(9 a)
д) Потенциальная энергия. Закон сохранения механической энергии.
Работа, которую может совершить потенциальная сила при перемещении из одной точки пространства в другую, называется потенциальной энергией.
Т
 ак
материальная точка с массой m, поднятая
на высотуН,
может совершить работу:
ак
материальная точка с массой m, поднятая
на высотуН,
может совершить работу:
Н А=mgH,
следовательно обладает потенциальной
энергией П=А=mgH.
А=mgH,
следовательно обладает потенциальной
энергией П=А=mgH.
Заметим, что в процессе реализации работы силы тяжести её потенциальная энергия убывает, т.е. dA=- dП.
Ранее
было получено дифференциальное уравнение
dТ=dA, которое для потенциальных сил
можно переписать:
dТ=- dП
или после интегрирования: Т= - П+С (10)
Полученное выражение можно записать словами:
Для механических систем, движение которых происходит под действием только потенциальных сил, сумма кинетической и потенциальной энергий есть величина постоянная.
Постоянная С в уравнении (10), равная сумме кинетической и потенциальной энергий, называется механической энергией(Е). Таким образом:
Т+П=Е=const (10а)